VisionAssist: Advanced Wearable for the Visually Impaired is a smart device that helps visually impaired individuals avoid obstacles while moving from one place to another. It is also equipped with a tiny camera that allows the user to capture any suspicious things around them.
One of the main problems visually impaired people face is accidentally colliding with obstacles and getting injured. The VisionAssist smart wearable device, equipped with a camera, reduces the chances of collisions. Additionally, it helps prevent situations where a visually impaired person might accidentally touch someone while moving indoors, potentially leading to misunderstandings or accusations of inappropriate behavior, as they are unaware of others' presence. VisionAssist can be very helpful in avoiding these issues.
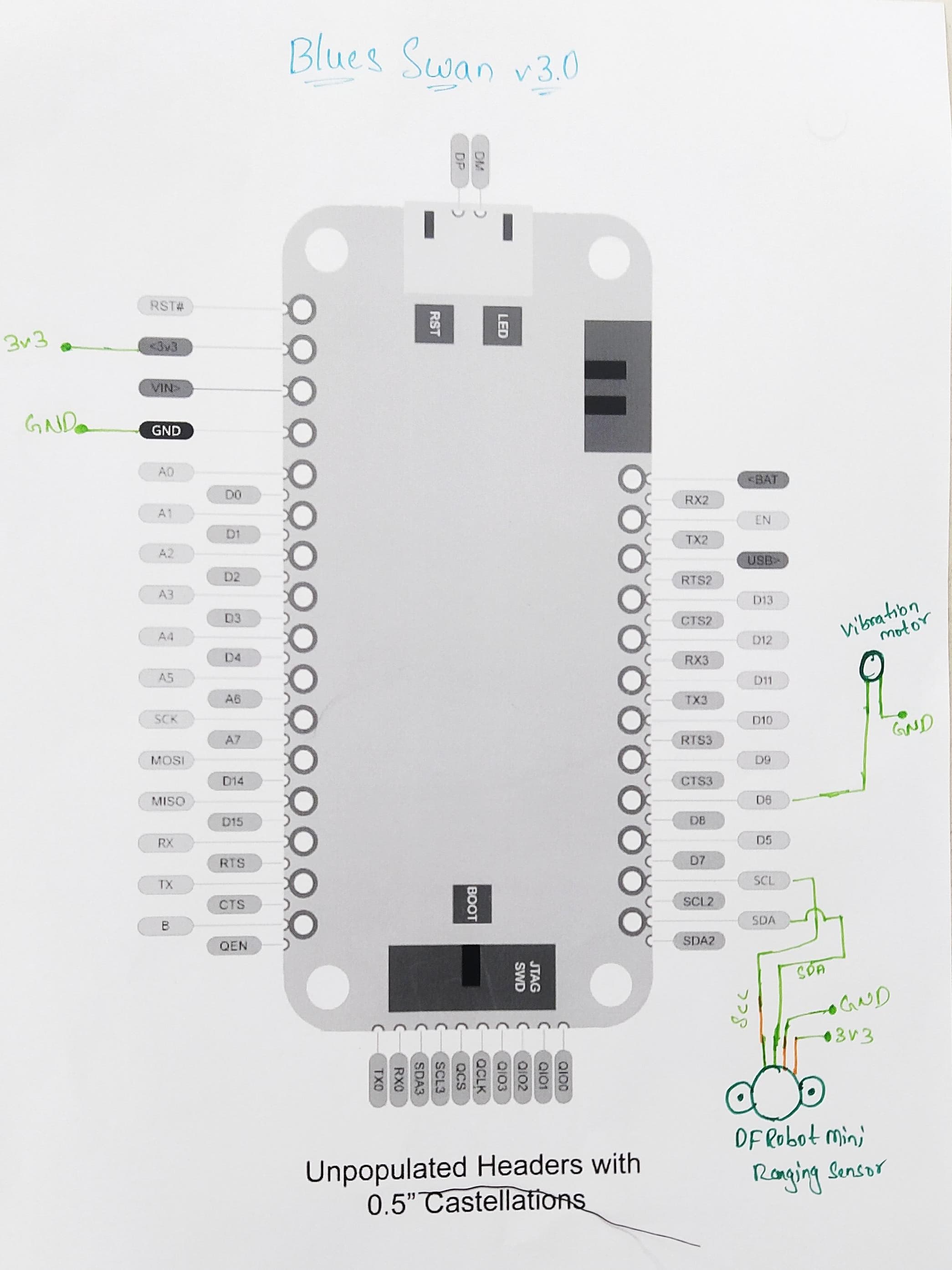
Integrating Ranging sensor and Vibration Motor
In the wearable device, we use a DFROBOT Mini Ranging Sensor to detect obstacles. If an obstacle is nearby, the person is alerted through a vibrator. This ensures that the visually impaired individual can move freely without worrying about obstacles. The Blues Swan board is used as the main controller for this system.
Vibrator motor and Mini ranging Sensor
Here we can see the alert message and the coin vibrator activating when there is an obstacle nearby.
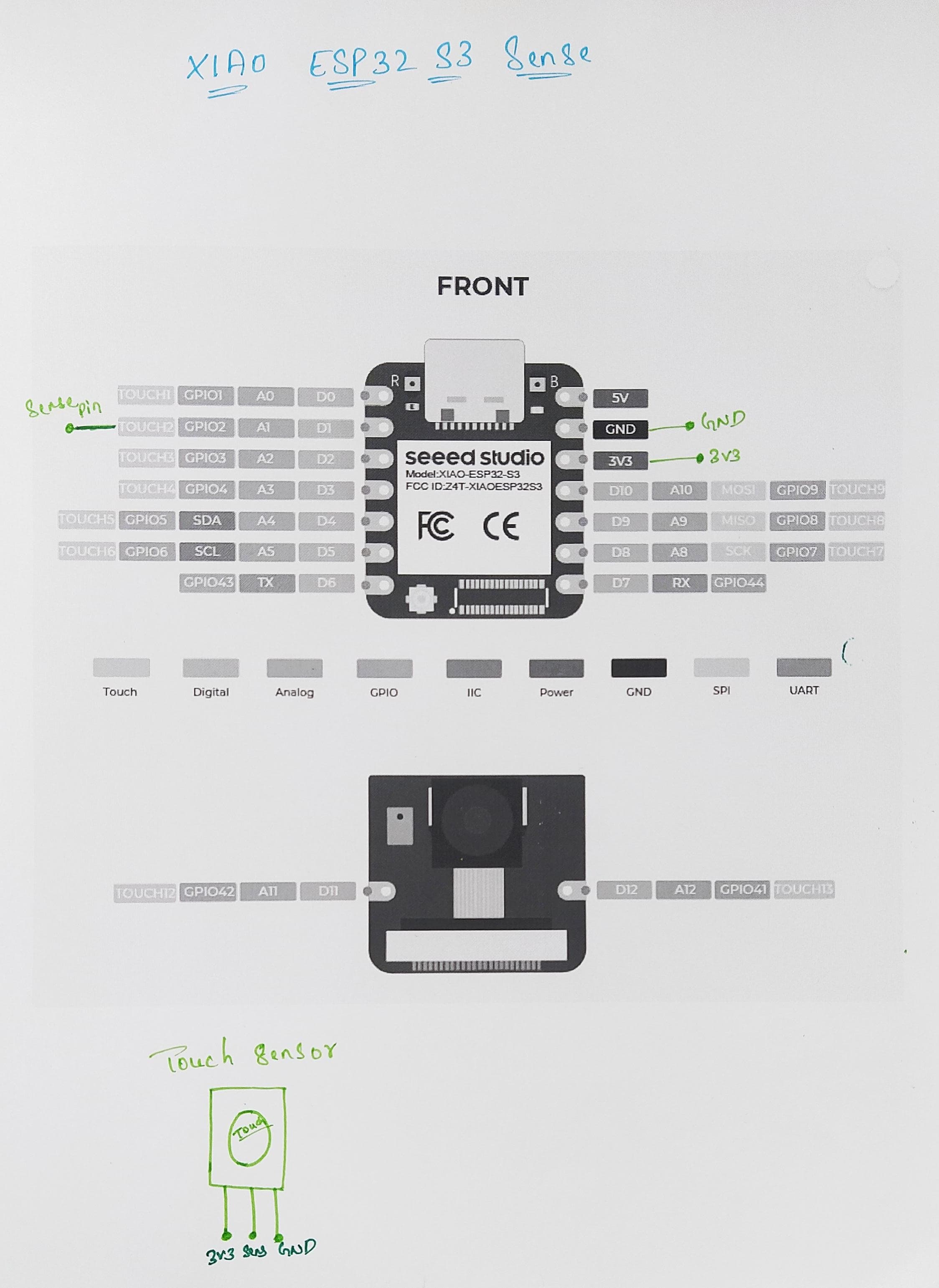
Adding Touch Sensor to XIAO ESP32 S3
In addition to the main controller, we are using the Xiao ESP32-S3 as a co-controller to capture images around the person wearing the smart wearable. A touch sensor is employed to detect when the user wants to take a photo; they simply need to touch the sensor. Upon detecting a touch, an image is captured using the OV2640 camera sensor. The captured image is then sent to an HTTP server and also saved to an SD card. The Raspberry Pi 4B serves as the HTTP server, where all captured images are stored and can be viewed by family members. This feature is helpful both for capturing images of suspicious individuals or places and for taking pictures of useful things that need to be shared with family.
Touch Sensor
Files on SD Card
Images files saved on SD Card
Configuring Raspberry Pi 4 Model B
To use the Raspberry Pi 4 Model B as an HTTP server, we are running Apache, MySQL, and PHP on the Raspbian OS.
Raspberry Pi 4 Model B
HTTP Server Page
Here, we can see the images uploaded to the HTTP server from the ESP32-S3. Images will be uploaded to the server whenever a touch is detected.
Server page
Future Scope: We can also add a fall detection sensor to detect accidental falls, and GNSS for outdoor navigation.
Touch sensor-Based Image Capture and HTTP POST Code
C/C++
Touch-Based Image Capture and HTTP POST Code: An image will be captured when a touch is detected on the touch sensor. The captured image will be posted to an HTTP server and saved to an SD card.
#include<Arduino.h>#include<WiFi.h>#include"soc/soc.h"#include"soc/rtc_cntl_reg.h"#include"esp_camera.h"#include"FS.h"#include"SD.h"#include"SPI.h"#define CAMERA_MODEL_XIAO_ESP32S3 // Has PSRAM#include"camera_pins.h"#define TOUCH_PIN 2 // GPIO where the OUT pin of the touch sensor is connectedconstchar*ssid="Area21";constchar*password="123459876";StringserverName="192.168.141.122";StringserverPath="/upload.php";// The default serverPath should be upload.phpconstintserverPort=80;WiFiClientclient;unsignedlonglastCaptureTime=0;// Last shooting timeintimageCount=1;// File Counterboolcamera_sign=false;// Check camera statusboolsd_sign=false;// Check sd statusbooltouchDetected=false;// Flag for touch sensor state// Save pictures to SD cardvoidphoto_save(constchar*fileName){// Take a photocamera_fb_t*fb=esp_camera_fb_get();if(!fb){Serial.println("Failed to get camera frame buffer");return;}// Save photo to filewriteFile(SD,fileName,fb->buf,fb->len);// Release image bufferesp_camera_fb_return(fb);Serial.println("Photo saved to file");}// SD card write filevoidwriteFile(fs::FS&fs,constchar*path,uint8_t*data,size_tlen){Serial.printf("Writing file: %s\n",path);Filefile=fs.open(path,FILE_WRITE);if(!file){Serial.println("Failed to open file for writing");return;}if(file.write(data,len)==len){Serial.println("File written");}else{Serial.println("Write failed");}file.close();}voidsetup(){Serial.begin(115200);while(!Serial);// Wait for serial monitor to startWiFi.mode(WIFI_STA);Serial.println();Serial.print("Connecting to ");Serial.println(ssid);WiFi.begin(ssid,password);while(WiFi.status()!=WL_CONNECTED){Serial.print(".");delay(500);}Serial.println();Serial.print("ESP32-CAM IP Address: ");Serial.println(WiFi.localIP());camera_config_tconfig;config.ledc_channel=LEDC_CHANNEL_0;config.ledc_timer=LEDC_TIMER_0;config.pin_d0=Y2_GPIO_NUM;config.pin_d1=Y3_GPIO_NUM;config.pin_d2=Y4_GPIO_NUM;config.pin_d3=Y5_GPIO_NUM;config.pin_d4=Y6_GPIO_NUM;config.pin_d5=Y7_GPIO_NUM;config.pin_d6=Y8_GPIO_NUM;config.pin_d7=Y9_GPIO_NUM;config.pin_xclk=XCLK_GPIO_NUM;config.pin_pclk=PCLK_GPIO_NUM;config.pin_vsync=VSYNC_GPIO_NUM;config.pin_href=HREF_GPIO_NUM;config.pin_sscb_sda=SIOD_GPIO_NUM;config.pin_sscb_scl=SIOC_GPIO_NUM;config.pin_pwdn=PWDN_GPIO_NUM;config.pin_reset=RESET_GPIO_NUM;config.xclk_freq_hz=20000000;config.frame_size=FRAMESIZE_UXGA;config.pixel_format=PIXFORMAT_JPEG;// for streamingconfig.grab_mode=CAMERA_GRAB_WHEN_EMPTY;config.fb_location=CAMERA_FB_IN_PSRAM;config.jpeg_quality=12;config.fb_count=1;// if PSRAM IC present, init with UXGA resolution and higher JPEG quality// for larger pre-allocated frame buffer.if(config.pixel_format==PIXFORMAT_JPEG){if(psramFound()){config.jpeg_quality=10;config.fb_count=2;config.grab_mode=CAMERA_GRAB_LATEST;}else{// Limit the frame size when PSRAM is not availableconfig.frame_size=FRAMESIZE_SVGA;config.fb_location=CAMERA_FB_IN_DRAM;}}else{// Best option for face detection/recognitionconfig.frame_size=FRAMESIZE_240X240;#if CONFIG_IDF_TARGET_ESP32S3config.fb_count=2;#endif}// Camera initesp_err_terr=esp_camera_init(&config);if(err!=ESP_OK){Serial.printf("Camera init failed with error 0x%x",err);return;}camera_sign=true;// Camera initialization check passes// Initialize SD cardif(!SD.begin(21)){Serial.println("Card Mount Failed");return;}uint8_tcardType=SD.cardType();// Determine if the type of SD card is availableif(cardType==CARD_NONE){Serial.println("No SD card attached");return;}Serial.print("SD Card Type: ");if(cardType==CARD_MMC){Serial.println("MMC");}elseif(cardType==CARD_SD){Serial.println("SDSC");}elseif(cardType==CARD_SDHC){Serial.println("SDHC");}else{Serial.println("UNKNOWN");}sd_sign=true;// SD initialization check passesSerial.println("XIAO ESP32S3 Sense Camera Image Capture");Serial.println("Touch the sensor to capture an image");pinMode(TOUCH_PIN,INPUT_PULLUP);// Configure the touch pin}voidloop(){if(camera_sign&&sd_sign){inttouchState=digitalRead(TOUCH_PIN);// Check if the touch sensor is pressedif(touchState==LOW){// Assuming LOW when touchedif(!touchDetected){// Avoid multiple captures for a single presstouchDetected=true;sendPhoto();// When touch is captured image will be uploaded to http servercharfilename[32];sprintf(filename,"/image%d.jpg",imageCount);photo_save(filename);Serial.printf("Saved picture: %s\n",filename);imageCount++;}}else{touchDetected=false;// Reset flag when touch is no longer detected}}}StringsendPhoto(){StringgetAll;StringgetBody;camera_fb_t*fb=NULL;fb=esp_camera_fb_get();if(!fb){Serial.println("Camera capture failed");delay(1000);ESP.restart();}Serial.println("Connecting to server: "+serverName);if(client.connect(serverName.c_str(),serverPort)){Serial.println("Connection successful!");Stringhead="--SmartWearable\r\nContent-Disposition: form-data; name=\"imageFile\"; filename=\"smartwearable.jpg\"\r\nContent-Type: image/jpeg\r\n\r\n";Stringtail="\r\n--SmartWearable--\r\n";uint32_timageLen=fb->len;uint32_textraLen=head.length()+tail.length();uint32_ttotalLen=imageLen+extraLen;client.println("POST "+serverPath+" HTTP/1.1");client.println("Host: "+serverName);client.println("Content-Length: "+String(totalLen));client.println("Content-Type: multipart/form-data; boundary=SmartWearable");client.println();client.print(head);uint8_t*fbBuf=fb->buf;size_tfbLen=fb->len;for(size_tn=0;n<fbLen;n=n+1024){if(n+1024<fbLen){client.write(fbBuf,1024);fbBuf+=1024;}elseif(fbLen%1024>0){size_tremainder=fbLen%1024;client.write(fbBuf,remainder);}}client.print(tail);esp_camera_fb_return(fb);inttimoutTimer=10000;longstartTimer=millis();booleanstate=false;while((startTimer+timoutTimer)>millis()){Serial.print(".");delay(100);while(client.available()){charc=client.read();if(c=='\n'){if(getAll.length()==0){state=true;}getAll="";}elseif(c!='\r'){getAll+=String(c);}if(state==true){getBody+=String(c);}startTimer=millis();}if(getBody.length()>0){break;}}Serial.println();client.stop();Serial.println(getBody);}else{getBody="Connection to "+serverName+" failed.";Serial.println(getBody);}returngetBody;}
Obstacle Detection
C/C++
Obstacle detection is performed using a DFROBOT Mini Laser Distance Range Sensor. If an obstacle is detected, the person will be alerted by a vibration motor.




















{kind=link}
{kind=link}
Comments