



Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 4 | ||||
Software apps and online services | ||||||
 |
| |||||
I was looking for an easy to read clock for my music room. Having just started experimenting with an Arduino I figured I would build one as my second Arduino project with a 4 in 1 8x8 LED matrix I bought a while ago and to add some additional features.
It displays the day of the week, month, year, time, temperature and humidity. It loops a couple of times and then enters sleep mode: the display turns off and it powers down to save battery power. An interrupt function is called when the PIR sensors detects motion (the LED in the bottom right will flash briefly to indicate it) and the main loop is active again.
The Sketch script can easily be edited to change several settings, like delay times and the numbers of loops, and it can also be expanded with displaying custom texts.
I realize an LED matrix, clock, temperature and motion sensors are pretty standard projects for an Arduino. However, the combination works great for my purposes and in the future I might expand it with Wifi so it can display weather forecasts, news headers, etc as well.
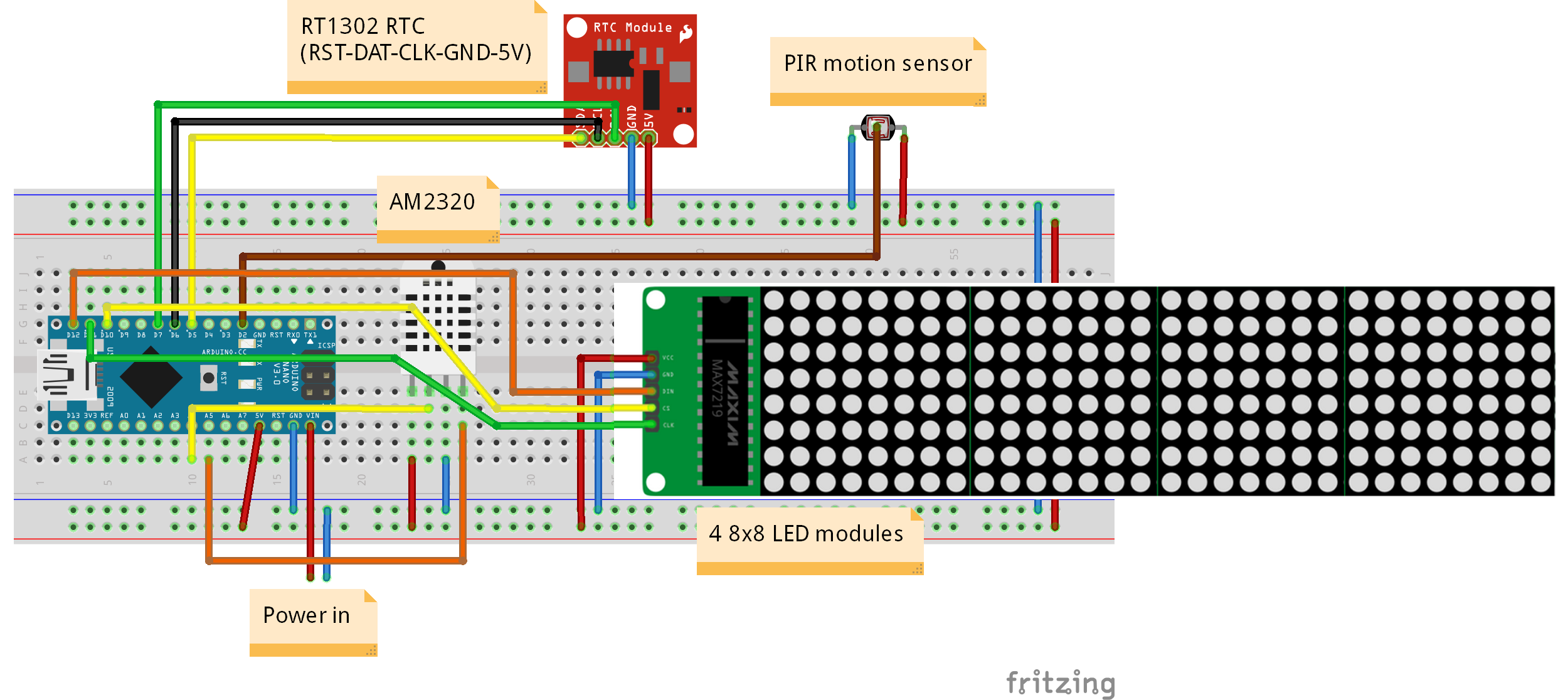
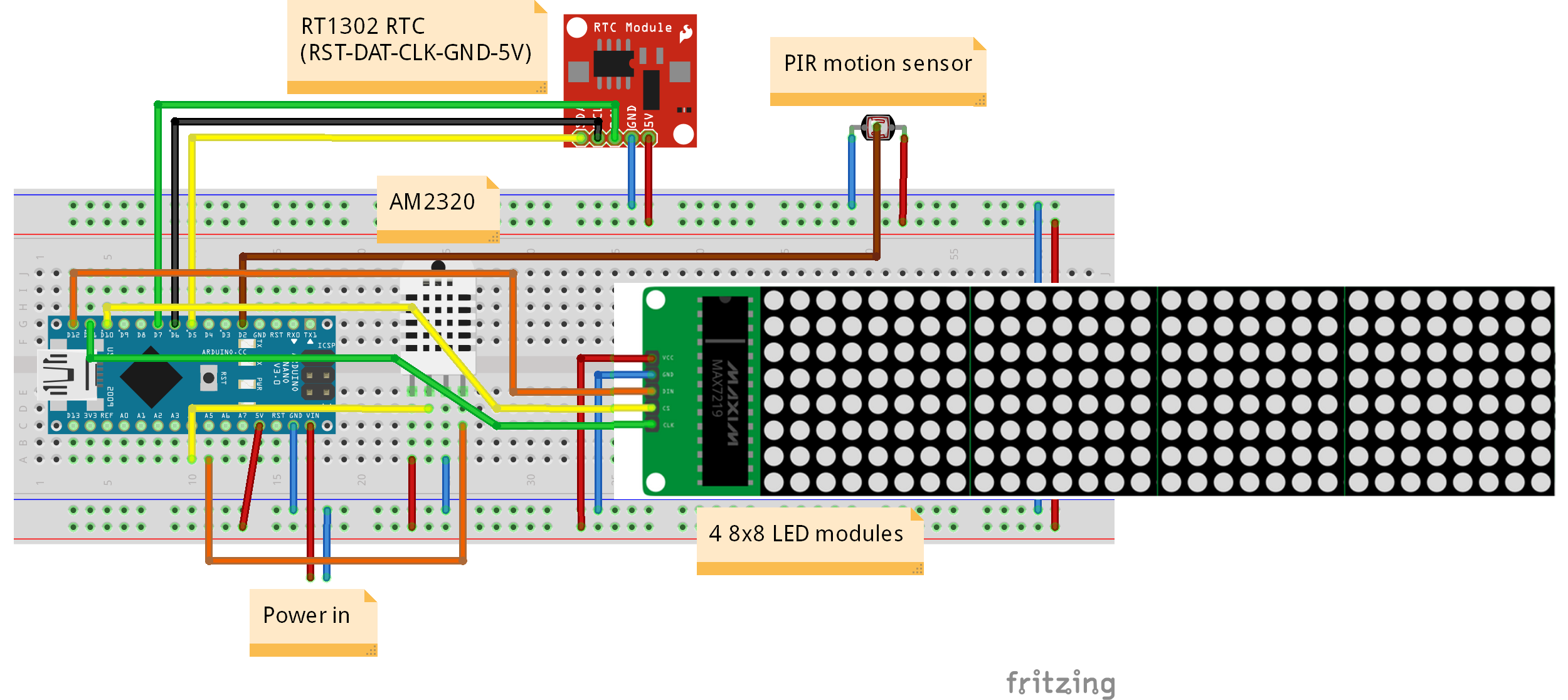
The setupHere is my test setup, check the schematic for details:
The project needs 2 standard libraries to work:
- stdio.h
- Wire.h
and 4 additional libraries (the links are in the Code section):
- DS1302.h
- LedControlMS.h
- LowPower.h
- AM2320.h
The LedControlMS.h library displays characters with a width of 5 LEDs per matrix which is 8 LEDs wide. So it leaves 3 LEDs unused. As I didn't like this I wrote an additional function which displays characters 6 LEDs wide at any start column and also across multiple matrices. It can also display multiline texts.
Setting the date and time: set the correct date and time in line 147 (166 for the enhanced version). Uncomment line 86 (99 for the enhanced version) and upload and run the code. Then comment line 86 (or 99) and upload the code again (or else the date and time would be reset to the coded values everytime you power up).
Finished projectThe setup built into a photo frame.
Edit: because of sensitivity issues, I later moved the motion sensor from the top to the frontpanel.
LicenseFeel free to use the code for your personal use, not for commercial purposes.
You can contact me at ericBcreator@gmail.com.
/*
* 32 x 8 LED matrix date-clock-temperature-humidity display by ericBcreator
*
* components:
* - DS1302 real time clock
* - AM2320 temperature and humidity sensor
* - PIR Motion Sensor
* - 4 x MAX7219 8x8 LED matrix
* - Arduino Nano
*
* last update 20171024 by ericBcreator
*
* This code is free for personal use, not for commercial purposes.
* Please leave this header intact.
*
* contact: ericBcreator@gmail.com
*/
//
// Include libraries
//
#include <stdio.h>
#include <DS1302.h> // library for DS1302 RealTimeClock
#include <LedControlMS.h> // library for 8x8 LED matrix
#include <LowPower.h> // library to turn the Arduino into sleep mode when no motion is detected
#include <Wire.h>
#include <AM2320.h> // library for AM2320 temperature-humidity sensor
AM2320 th; // pins connections: 1 to 5V, 2 (SDA) to A4, 3 to GND and 4 (SCL) A5
//
// Define pins
//
#define TEMPPIN A6 // temperature sensor pin
#define PIRPIN 2 // PIR sensor interrupt pin (2 or 3 for Arduino Nano)
#define CLOCKCEPIN 5 // DS1302 Chip Enable pin
#define CLOCKIOPIN 6 // DS1302 Input/Output pin
#define CLOCKCLKPIN 7 // DS1302 Serial Clock pin
#define LCLOADPIN 10 // LC LOAD pin
#define LCCLKPIN 11 // LC CLK pin
#define LCDINPIN 12 // LC DataIn pin
//
// Setup objects
//
// DataIn, CLK, LOAD, numOfDevices (fixed at 4)
LedControl lc = LedControl(LCDINPIN, LCCLKPIN, LCLOADPIN, 4);
// Create a DS1302 clock object
DS1302 rtc(CLOCKCEPIN, CLOCKIOPIN, CLOCKCLKPIN);
//
// Initialize variables
//
int ledBrightness = 0; // 0 -15
int numOfTimeLoops = 5; // num of 2 second loops the time will display
int delayTimeStatic = 4000; // display time for the static texts
int animDelay = 55; // delay time during animations
int clearLedDisplay = false; // not used
int ledUpdateDelay = 20; // delay time between drawing LED columns
int nextLineDelay = 1500; // delay time between multiple line displays
int numOfLoopsUntilSleep = 5; // number of times the main loop will run before going into sleep mode
int destMatrix, destCol;
int animType = 0;
int sleeping = true;
volatile int sleepLoopCounter = 0;
const char * DS1302ErrorMessage = "*RTC ERROR";
const char * AM2320ErrorMessage = "*TEMPERROR";
//
// Setup
//
void setup() {
//setTime(); // run once to initialize the date and time of the rtc
int devices = lc.getDeviceCount();
for(int address = 0; address < devices; address++) {
lc.shutdown(address, false);
// Set the brightness
lc.setIntensity(address, ledBrightness);
lc.clearDisplay(address);
}
pinMode (PIRPIN, INPUT);
digitalWrite (PIRPIN, LOW);
attachInterrupt(digitalPinToInterrupt(PIRPIN), PIRmotionDetected, RISING);
// for debugging
//Serial.begin(9600);
powerOnTest(); // check the sensors
}
//
// Main loop
//
void loop() {
if (sleepLoopCounter == 0 && sleeping == true) {
displayAnim();
sleeping = false;
}
if (sleepLoopCounter < numOfLoopsUntilSleep) {
sleepLoopCounter++;
displayDate();
displayTime();
displayTemp();
displayAnim();
}
else if (sleepLoopCounter == numOfLoopsUntilSleep) {
displayAnimClear();
sleeping = true;
sleepLoopCounter++;
// Enter power down state with ADC and BOD module disabled.
// When the PIR detects motion, an interrupt calls the PIRmotionDetected() function and the script continue
LowPower.powerDown(SLEEP_8S, ADC_OFF, BOD_OFF);
}
}
//
// Functions
//
void setTime() {
// Initialize a new chip by turning off write protection and clearing the
// clock halt flag. These methods needn't always be called. See the DS1302
// datasheet for details.
rtc.writeProtect(false);
rtc.halt(false);
// Make a new time object to set the date and time.
// yy, mm, dd, hr, min, sec, day of week
Time t(2017, 10, 20, 16, 51, 00, Time::kFriday);
// Set the time and date on the chip.
rtc.time(t);
}
void powerOnTest() {
Time t = rtc.time();
if (dayAsString(t.day) == DS1302ErrorMessage ) {
displayStringCondensed(0, DS1302ErrorMessage );
}
switch(th.Read())
case 1 or 2:
displayStringCondensed(0, AM2320ErrorMessage);
}
void PIRmotionDetected() {
if (digitalRead(PIRPIN) == HIGH) {
//Serial.println("Motion detected");
sleepLoopCounter = 0;
lc.setLed(3,0,0,true);
lc.setLed(3,0,0,false);
}
}
void displayDate() {
Time t = rtc.time();
String day = dayAsString(t.day);
char dayString[20];
snprintf(dayString, sizeof(dayString), "%s ", day.c_str());
displayStringCondensed(1, dayString);
delayAndClearLed();
String month = monthAsString(t.mon);
char dateString[8];
snprintf(dateString, sizeof(dateString), "%02d||%s", t.date, month.c_str());
displayStringCondensed(1, dateString);
delayAndClearLed();
char yearString[5];
snprintf(yearString, sizeof(yearString), "%04d", t.yr);
displayStringCondensed(4, yearString);
delayAndClearLed();
}
void displayTime() {
for (int i = 0; i <= numOfTimeLoops; i++) {
Time t = rtc.time();
char timeString[9];
snprintf(timeString, sizeof(timeString), "%02d||||%02d", t.hr, t.min);
displayStringCondensed(2, timeString);
lc.setLed(1,5,0,false);
lc.setLed(1,2,0,false);
delay(1000);
lc.setLed(1,5,0,true);
lc.setLed(1,2,0,true);
delay(1000);
}
if (clearLedDisplay)
lc.clearAll();
}
void displayTemp () {
int intValue, fracValue;
if(th.Read() == 0) {
char tempString[10];
intValue = th.t;
fracValue = th.t * 10 - intValue * 10;
snprintf(tempString, sizeof(tempString), "%02d.|%01d||C", intValue, fracValue);
displayStringCondensed(2, tempString);
delayAndClearLed();
}
else
displayStringCondensed(0, AM2320ErrorMessage);
if(th.Read() == 0) {
char humString[10];
intValue = th.h;
snprintf(humString, sizeof(humString), "%02d||/ ", intValue);
displayStringCondensed(7, humString);
delayAndClearLed();
}
else
displayStringCondensed(0, AM2320ErrorMessage);
}
void displayAnim() {
switch (animType) {
case 0:
for (int row = 0; row <= 7; row++) {
for (int matrix = 0; matrix <= 3; matrix++) {
lc.setRow(matrix, 7 - row, B11111111);
}
delay(animDelay);
}
break;
case 1:
for (int row = 0; row <= 7; row++) {
for (int matrix = 0; matrix <= 3; matrix++) {
lc.setRow(matrix, row, B11111111);
}
delay(animDelay);
}
break;
}
animType++;
if (animType > 1)
animType = 0;
if (clearLedDisplay)
lc.clearAll();
}
void displayAnimClear() {
for (int row = 0; row <= 7; row++) {
for (int matrix = 0; matrix <= 3; matrix++) {
lc.setRow(matrix, 7 - row, B00000000);
}
delay(animDelay);
}
}
void displayStringCondensed (int startCol, char * displayString) {
int i;
char c;
destMatrix = 0;
destCol = 7 - startCol;
for (i = 7; i > (7 - startCol); i--) // clear first columns if the startCol > 0
lc.setColumn(destMatrix, i, B00000000);
while (displayString[0] != 0) {
c = displayString[0];
if (destMatrix == 4 || displayString[0] == '~') { // next line when we're out of matrices or a newline character is sent: ~
clearLastColumns();
destMatrix = 0;
destCol = 7 - startCol;
if (displayString[0] == '~') {
displayString++;
c = displayString[0];
}
delay(nextLineDelay);
}
if (displayString[0] == '|') { // display one blank column
lc.setColumn(destMatrix, destCol, B00000000);
increaseColCounter();
}
else if (displayString[0] == '.') { // display a point in a single column
lc.setColumn(destMatrix, destCol, B10000000);
increaseColCounter();
}
else if (displayString[0] == '!') { // display a !
lc.setColumn(destMatrix, destCol, B10111111);
increaseColCounter();
}
else if (displayString[0] == '/') { // display a % sign, % sign won't work because of the snprintf function
lc.setColumn(destMatrix, destCol, B11000011);
increaseColCounter();
lc.setColumn(destMatrix, destCol, B00110011);
increaseColCounter();
lc.setColumn(destMatrix, destCol, B11001100);
increaseColCounter();
lc.setColumn(destMatrix, destCol, B11000011);
increaseColCounter();
}
else if (displayString[0] == '*') { // display a *
lc.setColumn(destMatrix, destCol, B00100010);
increaseColCounter();
lc.setColumn(destMatrix, destCol, B00010100);
increaseColCounter();
lc.setColumn(destMatrix, destCol, B01111111);
increaseColCounter();
lc.setColumn(destMatrix, destCol, B00010100);
increaseColCounter();
lc.setColumn(destMatrix, destCol, B00100010);
increaseColCounter();
lc.setColumn(destMatrix, destCol, B00000000);
increaseColCounter();
}
else {
if (destMatrix == 3 && destCol < 4) { // the character does not fit so enforce a new line
clearLastColumns();
destMatrix = 0;
destCol = 7 - startCol;
displayString--;
delay(nextLineDelay);
}
else {
int pos = lc.getCharArrayPosition(c);
for (i = 0; i < 6; i++) {
lc.setColumn(destMatrix, destCol, alphabetBitmap[pos][i]);
increaseColCounter();
}
}
}
displayString++;
}
clearLastColumns();
}
void increaseColCounter() {
destCol--;
if (destCol < 0) {
destMatrix++;
destCol = 7;
}
delay(ledUpdateDelay);
}
void clearLastColumns() {
for (int i = destMatrix * 8 + destCol; i < 4 * 8; i++) {
lc.setColumn(destMatrix, destCol, B00000000);
increaseColCounter();
}
}
void delayAndClearLed() {
delay(delayTimeStatic);
if (clearLedDisplay)
lc.clearAll();
}
String dayAsString(const Time::Day day) {
switch (day) {
case Time::kSunday: return "|||Sun- day";
case Time::kMonday: return "|||Mon- day";
case Time::kTuesday: return "Tues- day";
case Time::kWednesday: return "|||Wed-ness- day";
case Time::kThursday: return "Thurs|||-day";
case Time::kFriday: return "|||Fri- day";
case Time::kSaturday: return "Satur|||-day";
}
return DS1302ErrorMessage ;
}
String monthAsString(int month) {
switch (month) {
case 1: return "Jan";
case 2: return "Feb";
case 3: return "Mar";
case 4: return "Apr";
case 5: return "May";
case 6: return "Jun";
case 7: return "Jul";
case 8: return "Aug";
case 9: return "Sep";
case 10: return "Oct";
case 11: return "Nov";
case 12: return "Dec";
}
return DS1302ErrorMessage ;
}
20171103 enhanced 32x8 LED matrix Sketch code with the 5V input of the AM2320 on pin D8
Arduino/*
***************************************************************************
* 32 x 8 LED matrix date-clock-temperature-humidity display by ericBcreator
*
* enhanced version with the AM2320 powered by a delayed output pin D8 and
* reset function when there is an error
*
* components:
* - DS1302 real time clock
* - AM2320 temperature and humidity sensor
* - PIR Motion Sensor
* - 4 x MAX7219 8x8 LED matrix
* - Arduino Nano
*
***************************************************************************
* last updated 20171103 by ericBcreator
*
* This code is free for personal use, not for commercial purposes.
* Please leave this header intact.
*
* contact: ericBcreator@gmail.com
***************************************************************************
*/
//
// Include libraries
//
#include <stdio.h>
#include <DS1302.h> // library for DS1302 RealTimeClock
#include <LedControlMS.h> // library for 8x8 LED matrix
#include <LowPower.h> // library to turn the Arduino into sleep mode when no motion is detected
#include <Wire.h>
#include <AM2320.h> // library for AM2320 temperature-humidity sensor
AM2320 th; // pins connections: 1 to 5V, 2 (SDA) to A4, 3 to GND and 4 (SCL) A5
//
// Define pins
//
#define TEMPPIN A6 // temperature sensor pin
#define AM2320POWERPIN 8 // output pin to power the AM2320 with a delay
#define PIRPIN 2 // PIR sensor interrupt pin (2 or 3 for Arduino Nano)
#define CLOCKCEPIN 5 // DS1302 Chip Enable pin
#define CLOCKIOPIN 6 // DS1302 Input/Output pin
#define CLOCKCLKPIN 7 // DS1302 Serial Clock pin
#define LCLOADPIN 10 // LC LOAD pin
#define LCCLKPIN 11 // LC CLK pin
#define LCDINPIN 12 // LC DataIn pin
//
// Setup objects
//
// DataIn, CLK, LOAD, numOfDevices (fixed at 4)
LedControl lc = LedControl(LCDINPIN, LCCLKPIN, LCLOADPIN, 4);
// Create a DS1302 clock object
DS1302 rtc(CLOCKCEPIN, CLOCKIOPIN, CLOCKCLKPIN);
//
// Initialize variables
//
int ledBrightness = 0; // 0 -15
int timeBlinkDelay = 500; // blink speed of the colon
int numOfTimeLoops = 10; // num of 2 second loops the time will display
int delayTimeStatic = 4000; // display time for the static texts
int animDelay = 55; // delay time during animations
int clearLedDisplay = false; // not used
int ledUpdateDelay = 20; // delay time between drawing LED columns
int nextLineDelay = 1500; // delay time between multiple line displays
int numOfLoopsUntilSleep = 5; // number of times the main loop will run before going into sleep mode
int AM2320powerDelay = 2000; // delay time before powering the AM2320 sensor
int destMatrix, destCol;
int animType = 0;
int sleeping = true;
int firstLoop = true;
volatile int sleepLoopCounter = 0;
const char * DS1302ErrorMessage = "*RTC ERROR";
const char * AM2320ErrorMessage = "*TEMPERROR";
//
// Setup
//
void setup() {
//Serial.begin(9600); // for debugging
//setTime(); // run once to initialize the date and time of the rtc
int devices = lc.getDeviceCount();
for(int address = 0; address < devices; address++) {
lc.shutdown(address, false);
// Set the brightness
lc.setIntensity(address, ledBrightness);
lc.clearDisplay(address);
}
pinMode (PIRPIN, INPUT);
digitalWrite (PIRPIN, LOW);
attachInterrupt(digitalPinToInterrupt(PIRPIN), PIRmotionDetected, RISING);
pinMode (AM2320POWERPIN, OUTPUT);
resetAM2320();
powerOnTest(); // check the sensors
}
//
// Main loop
//
void loop() {
if (sleepLoopCounter == 0 && sleeping == true) {
displayAnim();
if (firstLoop != true) { // when waking up, first display the time, then do the regular loop
displayTime();
displayAnim();
}
sleeping = false;
firstLoop = false;
}
if (sleepLoopCounter < numOfLoopsUntilSleep) {
sleepLoopCounter++;
displayDate();
displayTime();
displayTemp();
displayAnim();
}
else if (sleepLoopCounter == numOfLoopsUntilSleep) {
displayAnimClear();
sleeping = true;
sleepLoopCounter++;
// Enter power down state with ADC and BOD module disabled.
// When the PIR detects motion, an interrupt calls the PIRmotionDetected() function and the script continue
LowPower.powerDown(SLEEP_8S, ADC_OFF, BOD_OFF);
}
}
//
// Functions
//
void setTime() {
// Initialize a new chip by turning off write protection and clearing the
// clock halt flag. These methods needn't always be called. See the DS1302
// datasheet for details.
rtc.writeProtect(false);
rtc.halt(false);
// Make a new time object to set the date and time.
// yy, mm, dd, hr, min, sec, day of week
Time t(2017, 10, 29, 6, 45, 0, Time::kSunday);
// Set the time and date on the chip.
rtc.time(t);
}
void powerOnTest() {
displayStringCondensed(2, "INIT...");
delay (AM2320powerDelay);
Time t = rtc.time();
int readTH;
for (int i = 0; i < 1; i++) {
readTH = th.Read();
if (readTH == 1 or readTH == 2) {
//if (i == 1) displayStringCondensed(0, AM2320ErrorMessage);
resetAM2320();
}
}
if (dayAsString(t.day) == DS1302ErrorMessage ) {
displayStringCondensed(0, DS1302ErrorMessage);
}
}
void PIRmotionDetected() {
if (digitalRead(PIRPIN) == HIGH) {
//Serial.println("Motion detected");
sleepLoopCounter = 0;
lc.setLed(3,0,0,true);
lc.setLed(3,0,0,false);
}
}
void displayDate() {
Time t = rtc.time();
String day = dayAsString(t.day);
char dayString[20];
snprintf(dayString, sizeof(dayString), "%s ", day.c_str());
displayStringCondensed(1, dayString);
delayAndClearLed();
String month = monthAsString(t.mon);
char dateString[8];
snprintf(dateString, sizeof(dateString), "%02d||%s", t.date, month.c_str());
displayStringCondensed(1, dateString);
delayAndClearLed();
char yearString[5];
snprintf(yearString, sizeof(yearString), "%04d", t.yr);
displayStringCondensed(4, yearString);
delayAndClearLed();
}
void displayTime() {
for (int i = 0; i <= numOfTimeLoops; i++) {
Time t = rtc.time();
char timeString[9];
snprintf(timeString, sizeof(timeString), "%02d||||%02d", t.hr, t.min);
displayStringCondensed(2, timeString);
lc.setLed(1,5,0,false);
lc.setLed(1,2,0,false);
delay(timeBlinkDelay);
lc.setLed(1,5,0,true);
lc.setLed(1,2,0,true);
delay(timeBlinkDelay);
}
if (clearLedDisplay)
lc.clearAll();
}
void displayTemp () {
int intValue, fracValue;
if(th.Read() == 0) {
char tempString[10];
intValue = th.t;
fracValue = th.t * 10 - intValue * 10;
snprintf(tempString, sizeof(tempString), "%02d.|%01d||C", intValue, fracValue);
displayStringCondensed(2, tempString);
delayAndClearLed();
}
else {
displayStringCondensed(0, AM2320ErrorMessage);
resetAM2320();
}
if(th.Read() == 0) {
char humString[10];
intValue = th.h;
snprintf(humString, sizeof(humString), "%02d||/ ", intValue);
displayStringCondensed(7, humString);
delayAndClearLed();
}
else {
displayStringCondensed(0, AM2320ErrorMessage);
resetAM2320();
}
}
void displayAnim() {
switch (animType) {
case 0:
for (int row = 0; row <= 7; row++) {
for (int matrix = 0; matrix <= 3; matrix++) {
lc.setRow(matrix, 7 - row, B11111111);
}
delay(animDelay);
}
break;
case 1:
for (int row = 0; row <= 7; row++) {
for (int matrix = 0; matrix <= 3; matrix++) {
lc.setRow(matrix, row, B11111111);
}
delay(animDelay);
}
break;
}
animType++;
if (animType > 1)
animType = 0;
if (clearLedDisplay)
lc.clearAll();
}
void displayAnimClear() {
for (int row = 0; row <= 7; row++) {
for (int matrix = 0; matrix <= 3; matrix++) {
lc.setRow(matrix, 7 - row, B00000000);
}
delay(animDelay);
}
}
void displayStringCondensed (int startCol, char * displayString) {
int i;
char c;
destMatrix = 0;
destCol = 7 - startCol;
for (i = 7; i > (7 - startCol); i--) // clear first columns if the startCol > 0
lc.setColumn(destMatrix, i, B00000000);
while (displayString[0] != 0) {
c = displayString[0];
if (destMatrix == 4 || displayString[0] == '~') { // next line when we're out of matrices or a newline character is sent: ~
clearLastColumns();
destMatrix = 0;
destCol = 7 - startCol;
if (displayString[0] == '~') {
displayString++;
c = displayString[0];
}
delay(nextLineDelay);
}
if (displayString[0] == '|') { // display one blank column
lc.setColumn(destMatrix, destCol, B00000000);
increaseColCounter();
}
else if (displayString[0] == '.') { // display a point in a single column
lc.setColumn(destMatrix, destCol, B10000000);
increaseColCounter();
}
else if (displayString[0] == '!') { // display a !
lc.setColumn(destMatrix, destCol, B10111111);
increaseColCounter();
}
else if (displayString[0] == '/') { // display a % sign, % sign won't work because of the snprintf function
lc.setColumn(destMatrix, destCol, B11000011);
increaseColCounter();
lc.setColumn(destMatrix, destCol, B00110011);
increaseColCounter();
lc.setColumn(destMatrix, destCol, B11001100);
increaseColCounter();
lc.setColumn(destMatrix, destCol, B11000011);
increaseColCounter();
}
else if (displayString[0] == '*') { // display a *
lc.setColumn(destMatrix, destCol, B00100010);
increaseColCounter();
lc.setColumn(destMatrix, destCol, B00010100);
increaseColCounter();
lc.setColumn(destMatrix, destCol, B01111111);
increaseColCounter();
lc.setColumn(destMatrix, destCol, B00010100);
increaseColCounter();
lc.setColumn(destMatrix, destCol, B00100010);
increaseColCounter();
lc.setColumn(destMatrix, destCol, B00000000);
increaseColCounter();
}
else {
if (destMatrix == 3 && destCol < 4) { // the character does not fit so enforce a new line
clearLastColumns();
destMatrix = 0;
destCol = 7 - startCol;
displayString--;
delay(nextLineDelay);
}
else {
int pos = lc.getCharArrayPosition(c);
for (i = 0; i < 6; i++) {
lc.setColumn(destMatrix, destCol, alphabetBitmap[pos][i]);
increaseColCounter();
}
}
}
displayString++;
}
clearLastColumns();
}
void increaseColCounter() {
destCol--;
if (destCol < 0) {
destMatrix++;
destCol = 7;
}
delay(ledUpdateDelay);
}
void clearLastColumns() {
for (int i = destMatrix * 8 + destCol; i < 4 * 8; i++) {
lc.setColumn(destMatrix, destCol, B00000000);
increaseColCounter();
}
}
void delayAndClearLed() {
delay(delayTimeStatic);
if (clearLedDisplay)
lc.clearAll();
}
String dayAsString(const Time::Day day) {
switch (day) {
case Time::kSunday: return "|||Sun- day";
case Time::kMonday: return "|||Mon- day";
case Time::kTuesday: return "Tues- day";
case Time::kWednesday: return "|||Wed-ness- day";
case Time::kThursday: return "Thurs|||-day";
case Time::kFriday: return "|||Fri- day";
case Time::kSaturday: return "Satur|||-day";
}
return DS1302ErrorMessage ;
}
String monthAsString(int month) {
switch (month) {
case 1: return "Jan";
case 2: return "Feb";
case 3: return "Mar";
case 4: return "Apr";
case 5: return "May";
case 6: return "Jun";
case 7: return "Jul";
case 8: return "Aug";
case 9: return "Sep";
case 10: return "Oct";
case 11: return "Nov";
case 12: return "Dec";
}
return DS1302ErrorMessage ;
}
void resetAM2320() {
digitalWrite (AM2320POWERPIN, LOW);
delay (AM2320powerDelay);
digitalWrite (AM2320POWERPIN, HIGH);
}






{kind=link}
Comments