/**
* @file mbot_ranger_cmd_vel.ino
* @author Erwin Rabano Pasia
* @version V1.0
* @date 2022/02/01
* @description This file is the cmd_vel code for the mBot Ranger.
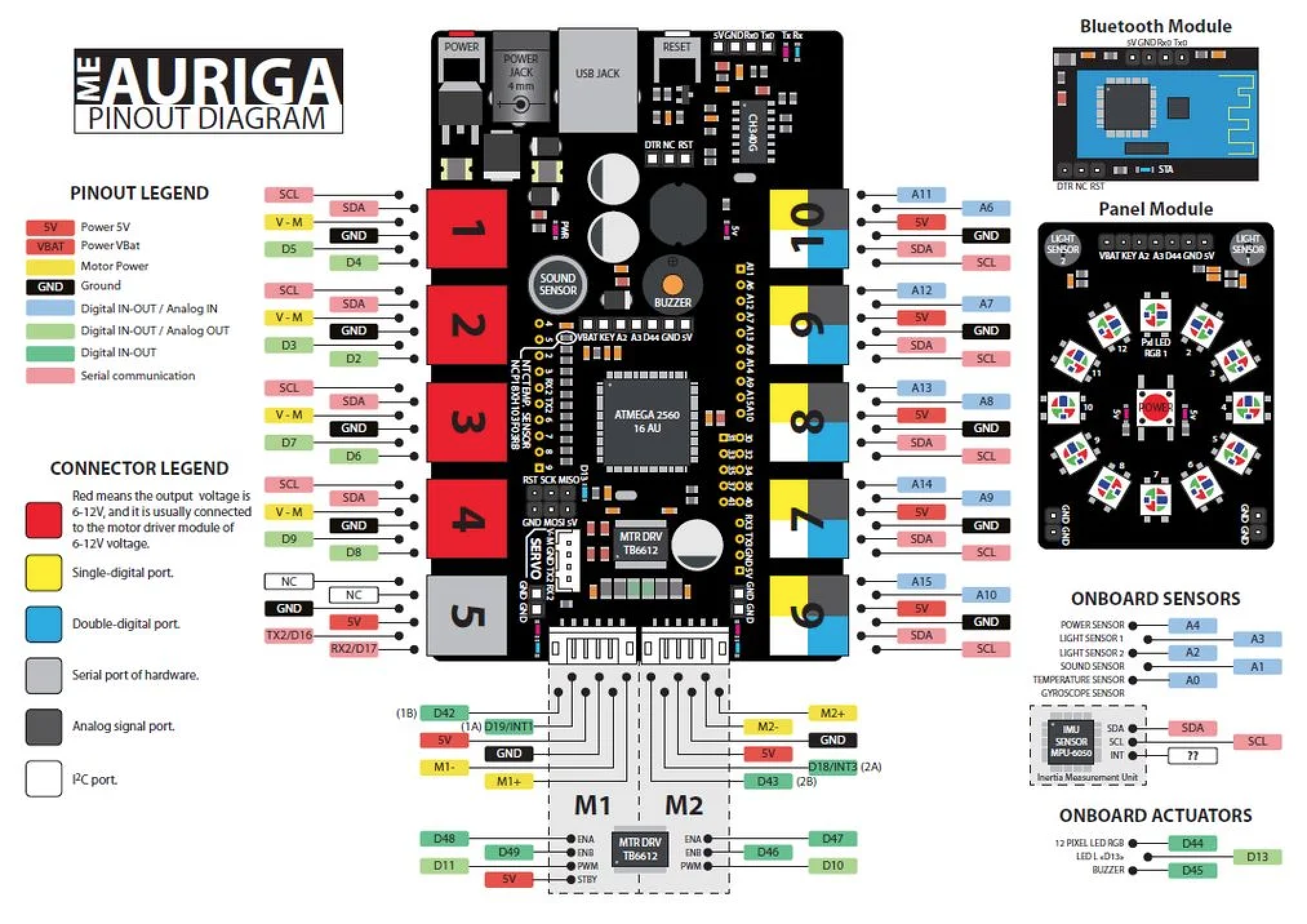
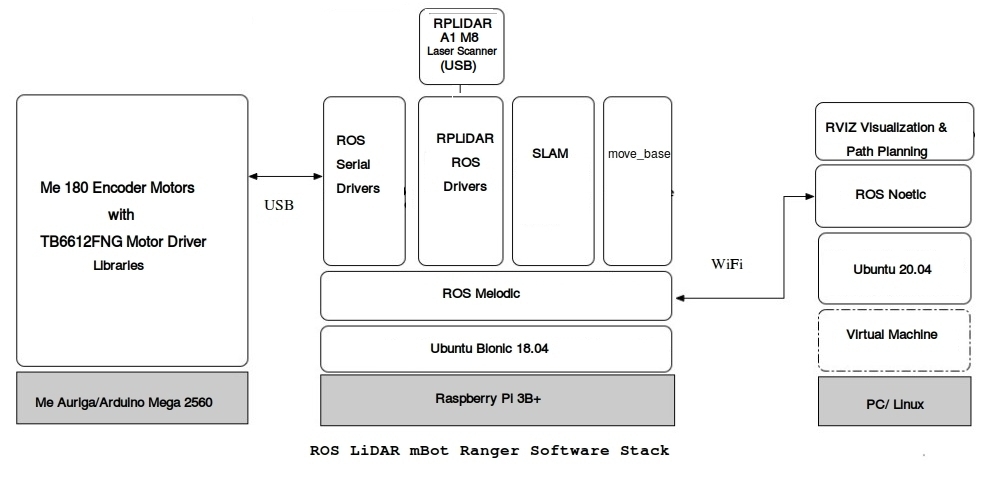
* Using the Makeblock Me Auriga Board which is actually an integrated MCU (Arduino Mega2560 and an on-board TB6612 Motor Driver)
* for the Two Me-180 Encoder Motors.
*/
#include <ros.h>
#include <geometry_msgs/Twist.h>
// Maximum PWM = 255
int maxPwm=225;
int halfPwm=225;
int stopPwm=0;
int turnPwm=255;
//Encoder Motor Left
const int pwmMotor1 = 11;
const int inMotor1_1 = 49;
const int inMotor1_2 = 48;
//Encoder Motor Right
const int pwmMotor2 = 10;
const int inMotor2_1 = 47;
const int inMotor2_2 = 46;
ros::NodeHandle nh;
void MoveBack() {
digitalWrite(inMotor1_1, HIGH);
digitalWrite(inMotor1_2, LOW);
analogWrite(pwmMotor1,maxPwm);
digitalWrite(inMotor2_1, LOW);
digitalWrite(inMotor2_2, HIGH);
analogWrite(pwmMotor2,maxPwm);
Serial.println("Move Backward at Full speed"); //For debugging
}
void MoveStop() {
digitalWrite(inMotor1_1, LOW);
digitalWrite(inMotor1_2, LOW);
analogWrite(pwmMotor1,stopPwm);
digitalWrite(inMotor2_1, LOW);
digitalWrite(inMotor2_2, LOW);
analogWrite(pwmMotor2,stopPwm);
Serial.println("At Full-Stop Mode"); //For debugging
}
void MoveRight() {
digitalWrite(inMotor1_1, LOW);
digitalWrite(inMotor1_2, HIGH);
analogWrite(pwmMotor1,turnPwm);//Set speed via PWM
digitalWrite(inMotor2_1, LOW);
digitalWrite(inMotor2_2, HIGH);
analogWrite(pwmMotor2,turnPwm);//Set speed via PWM
Serial.println("Turning the Robot Right"); //For debugging
}
void MoveLeft() {
digitalWrite(inMotor1_1, HIGH);
digitalWrite(inMotor1_2, LOW);
analogWrite(pwmMotor1,turnPwm);//Set speed via PWM
digitalWrite(inMotor2_1, HIGH);
digitalWrite(inMotor2_2, LOW);
analogWrite(pwmMotor2,turnPwm);//Set speed via PWM
Serial.println("Turning the Robot Left"); //For debugging
}
void MoveFwd() {
digitalWrite(inMotor1_1, LOW);
digitalWrite(inMotor1_2, HIGH);
analogWrite(pwmMotor1,maxPwm);
digitalWrite(inMotor2_1, HIGH);
digitalWrite(inMotor2_2, LOW);
analogWrite(pwmMotor2,maxPwm);
Serial.println("Move Forward at Full speed"); //For debugging
}
void cmd_vel_cb(const geometry_msgs::Twist & msg) {
// Read the message.
// We only care about the linear x, and the rotational z.
const float x = msg.linear.x;
const float z_rotation = msg.angular.z;
// Decide on the encoder motor state we need, according to command.
if (x > 0 && z_rotation == 0) {
MoveFwd();
}
else if (x == 0 && z_rotation == 1) {
MoveRight();
}
else if (x == 0 && z_rotation < 0) {
MoveLeft();
}
else if (x < 0 && z_rotation == 0) {
MoveBack();
}
else{
MoveStop();
}
}
ros::Subscriber<geometry_msgs::Twist> sub("cmd_vel", cmd_vel_cb);
void setup() {
// pinMode(right_back, OUTPUT);
// pinMode(left_back, OUTPUT);
// pinMode(right_front, OUTPUT);
// pinMode(left_front, OUTPUT);
pinMode(pwmMotor1, OUTPUT);
pinMode(pwmMotor2, OUTPUT);
nh.initNode();
nh.subscribe(sub);
}
void loop() {
nh.spinOnce();
delay(1);
}










{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.