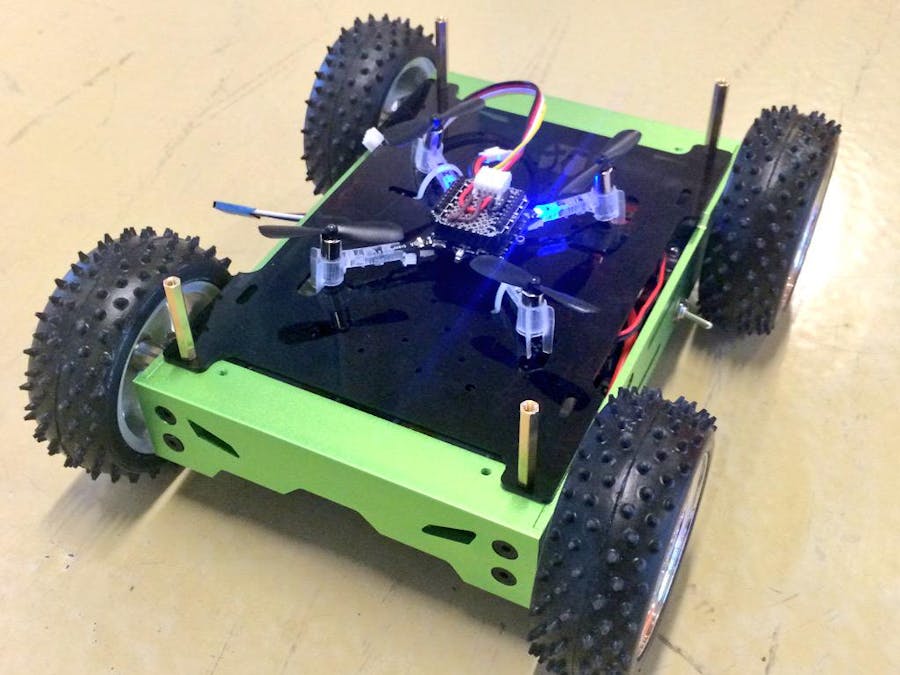
At Bitcraze we love robotics! Even though we design the Crazyflie 2.0 quadcoper that can be seen swishing around in our office, sometimes we want to go back to something more basic. So we decided to see if we could hook in our Crazyflie 2.0 to some RC-car. The platform we selected was the Skeleton bot from Seeedstudio. It has a motor controller based on Arduino and connectors for external communication.
The plan was to build an interface-deck, where you can easily plug the Crazyflie 2.0 to the platform to control the car, and then easily disconnect it and fly normally.
Step 1 - Getting ready
First of all make sure you have all the needed hardware and have assembled both the Skeleton bot and the Crazyflie 2.0.
Step 2 - Making the expansion deck
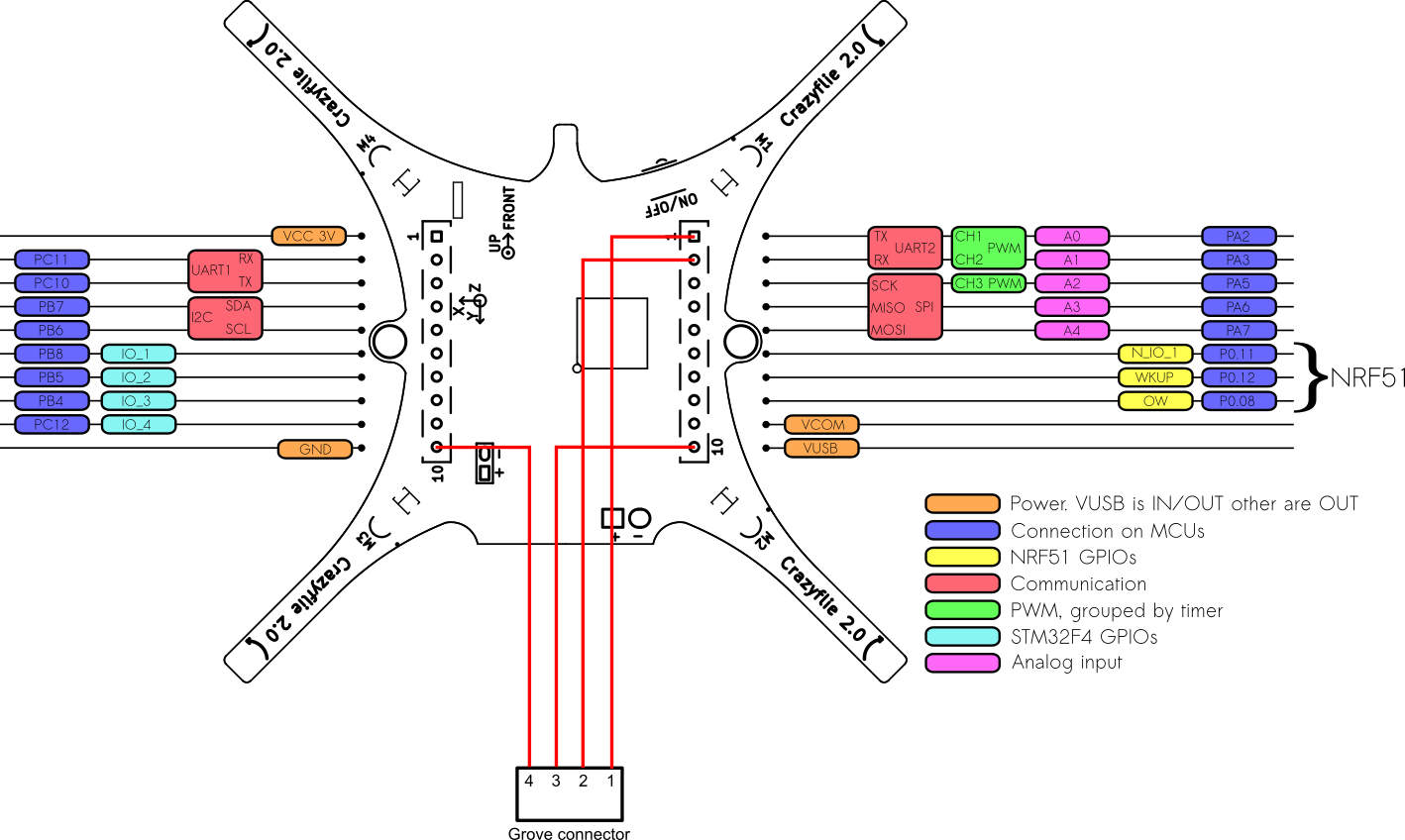
In order to be able to control the Skeleton bot from the Crazyflie 2.0 we need to interface it somehow. We selected the UART on the motor controller. By soldering one of the Grove connectors to a Crazyflie 2.0 prototype deck and connecting the pins to an UART on the deck it's possible to send commands to the motor controller. Please see the detailed schematic in the resources below.
1 / 2 • caption (optional)
Step 3 - Preparing the Skeleton bot firmware
The Skeleton bot contains an Arduino compatible micro-controller and can be programmed like a normal Arduino. The connector for programming it is shown below.
FTDI connector for programming the Skeleton bot Arduino
Step 4 - Preparing the Crazyflie 2.0 firmware
In order to be able to control the Skeleton bot you'll have to modify the Crazyflie 2.0 firmware. The easiest way to do this is to either use the attached binary, or to download our pre-made Virtual Machine that contains the full development environment.
Bitcraze VM
Step 5 - Connecting it all together
Attach the prototype deck to the Crazyflie 2.0 and connect it to the Skeleton bot using a Grove cable. Make sure to attach your Crazyflie 2.0 to the Skeleton bot, the ride might get a bit bumpy!
1 / 2
Step 6 - Time for some fun!
Now you can connect to the Crazyflie 2.0, just like you would do normally. Either using the client on a computer or using your mobile device. But instead of controlling the flying you will be controlling a car instead.
Add this to the build by adding the following to the Makefile: PROJ_OBJ_CF2 += crazycar.o CFLAGS += -DDECK_FORCE=bcCrazycar
/** * || ____ _ __ * +------+ / __ )(_) /_______________ _____ ___ * | 0xBC | / __ / / __/ ___/ ___/ __ `/_ / / _ \ * +------+ / /_/ / / /_/ /__/ / / /_/ / / /_/ __/ * || || /_____/_/\__/\___/_/ \__,_/ /___/\___/ * * Crazyflie control firmware * * Copyright (C) 2016 Bitcraze AB * * This program is free software: you can redistribute it and/or modify * it under the terms of the GNU General Public License as published by * the Free Software Foundation, in version 3. * * This program is distributed in the hope that it will be useful, * but WITHOUT ANY WARRANTY; without even the implied warranty of * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the * GNU General Public License for more details. * * You should have received a copy of the GNU General Public License * along with this program. If not, see <http://www.gnu.org/licenses/>. * * crazycar.c - Deck driver for the Crazyflie 2.0 Crazycar deck */#include<stdint.h>#include<stdlib.h>#include"stm32fxxx.h"#include"deck.h"#include"FreeRTOS.h"#include"timers.h"#include"uart2.h"#include"debug.h"#include"log.h"staticintlogIdRoll;staticintlogIdPitch;/* Template data for controlling the Skeleton bot */staticchardata[]={'S','S','0','0',0x0A};/* Create output string for sending to the Skeleton bot */voidcarSetControl(floatroll,floatpitch){floatf=pitch/30.0;floatt=roll/60.0;floatm1=f+t;floatm2=f-t;if(m1>1.0)m1=1.0;if(m1<-1)m1=-1;if(m2>1.0)m2=1.0;if(m2<-1)m2=-1;if(m1>0){data[0]='F';data[2]=(int)(m1*10)+'0';}else{data[0]='B';data[2]=(int)(m1*-10)+'0';}if(m2>0){data[1]='F';data[3]=(int)(m2*10)+'0';}else{data[1]='B';data[3]=(int)(m2*-10)+'0';}}/* Send commands to Skeleton bot at 10Hz */staticxTimerHandletimer;staticvoidctrlTimer(xTimerHandletimer){carSetControl(logGetFloat(logIdRoll),logGetFloat(logIdPitch));uart2SendData(sizeof(data),(uint8_t*)data);}/* Initialize the deck driver */staticvoidcrazycarDeckInit(DeckInfo*info){logIdRoll=logGetVarId("ctrltarget","roll");logIdPitch=logGetVarId("ctrltarget","pitch");uart2Init(19200);timer=xTimerCreate("ctrlTimer",M2T(100),pdTRUE,NULL,ctrlTimer);xTimerStart(timer,100);}staticconstDeckDrivercrazycar_deck={.vid=0xBC,.pid=0x00,.name="bcCrazycar",.usedPeriph=DECK_USING_UART2,.usedGpio=DECK_USING_TX2|DECK_USING_RX2,.init=crazycarDeckInit};DECK_DRIVER(crazycar_deck);
Skeleton bot Arduino code
Arduino
Code that should be loaded onto the Skeleton bot Arduino
// pin ctrl#define PINCS 6 // all mos cs#define PINM1R 4#define PINM1F 5#define PINM2F 7#define PINM2R 8#define PINPWMA 9 // PWM channel A (motor A speed)#define PINPWMB 10 // PWM channel B (motor B speed)StringtxtMsg="";chars;intmotorSpeed=0;voidsetup(){Serial.begin(19200);Serial.println("HERCULES 4WD TEST");pinMode(PINCS,OUTPUT);pinMode(PINM1F,OUTPUT);pinMode(PINM1R,OUTPUT);pinMode(PINM2F,OUTPUT);pinMode(PINM2R,OUTPUT);motorSetSpeed(255);}voidloop(){while(Serial.available()>0){s=(char)Serial.read();if(s=='\n'){Serial.print("Command: ");Serial.print(txtMsg);Serial.print(" Char: ");charcharBuf[5];txtMsg.toCharArray(charBuf,5);Serial.print(charBuf);Serial.print(" SpeedA: ");intspeedA=charBuf[2];speedA=(speedA-48)*28;Serial.print(speedA);Serial.print(" SpeedB: ");intspeedB=charBuf[3];speedB=(speedB-48)*28;Serial.print(speedB);analogWrite(PINPWMA,speedA);analogWrite(PINPWMB,speedB);if(charBuf[0]=='S'&&charBuf[1]=='S'){motorStop(0);Serial.print(" Action: Stop");}if(charBuf[0]=='F'&&charBuf[1]=='F'){motorForward(0);Serial.print(" Action: Forward");}if(charBuf[0]=='B'&&charBuf[1]=='B'){motorReverse(0);Serial.print(" Action: Reverse");}if(charBuf[0]=='B'&&charBuf[1]=='F'){motorTurnLeft(0);Serial.print(" Action: Left");}if(charBuf[0]=='F'&&charBuf[1]=='B'){motorTurnRight(0);Serial.print(" Action: Right");}Serial.println(";");txtMsg="";}else{txtMsg+=s;}}}voidmotorSetSpeed(intpower){motorSpeed=power;analogWrite(PINPWMA,motorSpeed);analogWrite(PINPWMB,motorSpeed);}voidmotorStop(intduration){digitalWrite(PINCS,LOW);digitalWrite(PINM1F,LOW);digitalWrite(PINM1R,LOW);digitalWrite(PINM2F,LOW);digitalWrite(PINM2R,LOW);delay(duration);}voidmotorForward(intduration){digitalWrite(PINM1R,HIGH);digitalWrite(PINM1F,LOW);digitalWrite(PINM2R,HIGH);digitalWrite(PINM2F,LOW);digitalWrite(PINCS,HIGH);delay(duration);}voidmotorReverse(intduration){digitalWrite(PINM1R,LOW);digitalWrite(PINM1F,HIGH);digitalWrite(PINM2R,LOW);digitalWrite(PINM2F,HIGH);digitalWrite(PINCS,HIGH);delay(duration);}voidmotorTurnLeft(intduration){digitalWrite(PINM1R,LOW);digitalWrite(PINM1F,HIGH);digitalWrite(PINM2R,HIGH);digitalWrite(PINM2F,LOW);digitalWrite(PINCS,HIGH);delay(duration);}voidmotorTurnRight(intduration){digitalWrite(PINM1R,HIGH);digitalWrite(PINM1F,LOW);digitalWrite(PINM2R,LOW);digitalWrite(PINM2F,HIGH);digitalWrite(PINCS,HIGH);delay(duration);}












{kind=link}
Comments