Story:
In order to facilitate and mechanize fishing for fishermen, we decided to create a device for automatic feeding of fish in ponds before fishing. The task of the device is to automatically release the bait placed in the device several times before the period determined voluntarily, which is to facilitate fishing thanks to increased fish activity through regular feeding.
The project is designed to facilitate the construction of people looking for similar projects. Providing a ready program with a schematic diagram.
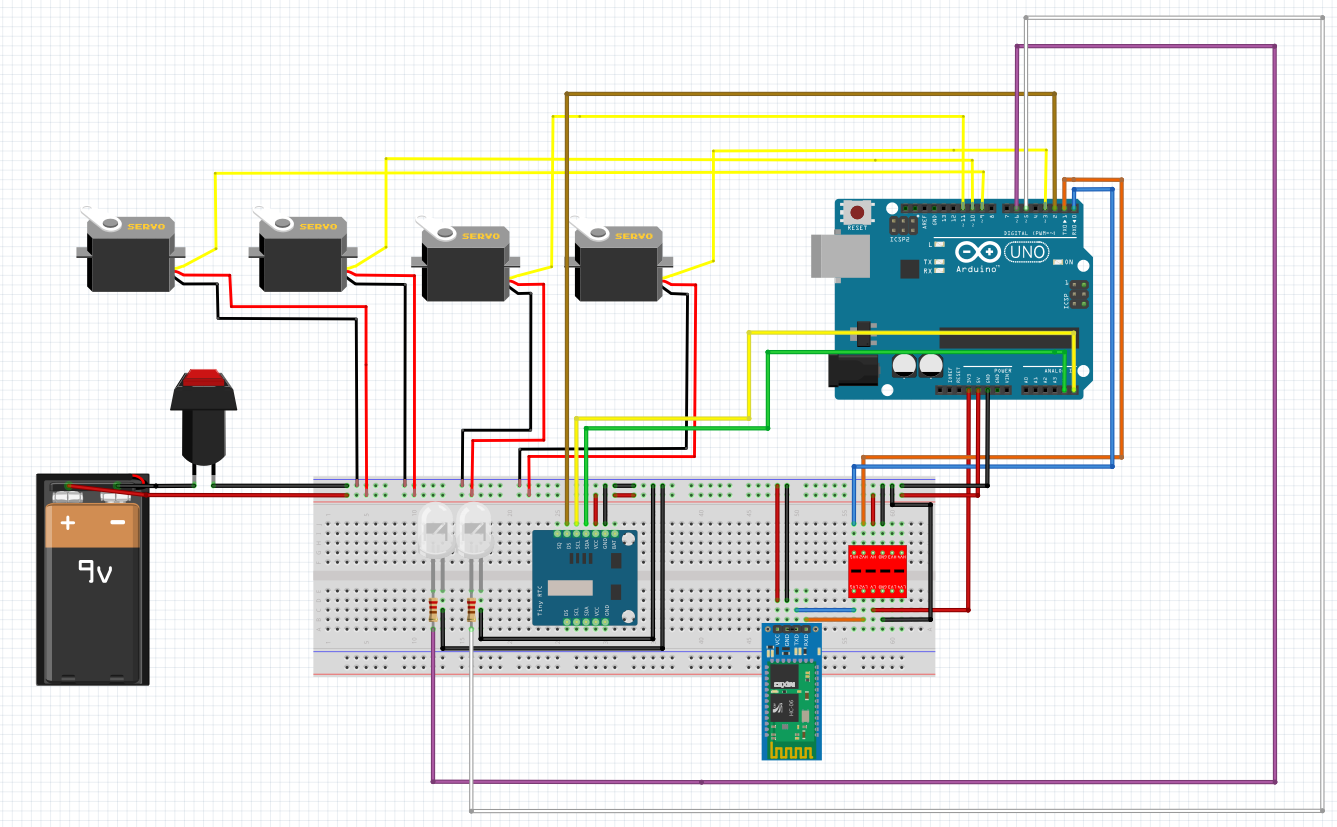
Project is using free Google Store app named: RoboRemoFree.Schematic diagram below:
Program operations:Program is using 4 servos every 6 hours each. After using the servo, the program automatically deactivates them.
The design includes 2 LEDs. First of them I shining all the time, second LED is shining olny whem the servo is open.
The servo performs the movement 180 degrees from the starting position. It can be easly change by the user.
Bluetooth receiver connects with the smartophone by using passoword: 1234. In RoboRemoFree app we add 4 sliders by setting text of each by: "1', "2", "3", "4".
The application allows you to perform a 180 degree movement by servos.
(You need to remember to set max/min moovement in app. It should be 0 to 180!)


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)









_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.