

Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
 |
| |||||
 |
| |||||
Hand tools and fabrication machines | ||||||
| ||||||
| ||||||
| ||||||
The motive behind this project:
It is always heart-wrenching to see old people call out or wait for help. Dependancy on others makes one feel miserable and weak, even more so for them. Our aim at creating this project was to make it easier for anyone, who has a weak or an injured arm for performing menial day to day tasks with ease on parity with a normal arm.
Our Project: Voice-Activated Exoskeleton Arm is a simple wearable framework that supports the muscles to perform work with lesser strain and greater comfort using mechanical actuators and electrical power. While the scope of the project and the concept of exoskeletons is huge, we have focused on keeping things simplistic for the elderly to use so that they can learn it as fast as possible and do their day to day tasks without assistance.
The entire project has been elaborated stepwise using videos, photos and lucid instructions. It has also been documented in detail in a technical paper published in the IEEE Xplore library. It was presented at the International Conference on Smart Cities and Emerging Technologies ( ICSCET ) on 5th January, 2018. (Published, DOI: 10.1109/ICSCET.2018.8537273) The paper can be found at this link as well:
https://ieeexplore.ieee.org/document/8537273
Overview:
With the world’s demographics growing older at a rapid rate, the challenges to be dealt with are going to be massive. As age sets in, cognitive disorders that stay dormant during their young age make a vehement onslaught leading to impairment of basic functions.
We at ….., intend to focus on upholding the self-respect & independence of our seniors. Accordingly, we have designed a voice-enabled exoskeleton arm which can be an apt fit for seniors who prefer to go about their daily routine.
Project planning and On-paper calculations:
Whenever a new technology is introduced for elderly people, a major difficulty is faced in its adoption i.e. they find it difficult to operate or learn its functionalities even with guidance. The concept is quite ironical.
Keeping this in mind we have developed an intuitive device with the following features -
- IoT enabled
- Bluetooth enabled voice control
- Gesture enabled
- No buttons, except a big ON-OFF electric switch
- Simple to wear, light-weight design(aluminum-based alloy)
- Long battery life (exceeding 1 hour at full load capacity)
- Affordable for old people ($35 cost of manufacturing)
- Load-bearing Capacity (approx. 6-10kgs) with 0-150 degrees of angular displacement. Accordingly, you can lift 15kgs of weight with roughly 11 kgs of strain on your bicep muscles and so on
- Cases of Restive and System failure are easily detected & an auto-alert is generated
- Alert signals can be sent in case of system failure using Bluetooth
It was decided that this project will be kept as simple and light as possible, with structural improvements saved for later. Hence, a planar design with 1 DOF (Degree of Freedom) was chosen. The actuation by the motor was transferred via a high tension cable which can support more than 50 Kgf force at the point on which the load is hanged.
The following calculations and photographs explain how the maximum possible weight that could be lifted by the motor (90 Kgcm torque, 10 RPM) to a particular height is derived. The power budget is also mentioned, for a 2200mAh, 3S, 12V, 30C LiPo battery, at full load. In case of any doubts, please feel free to ask in the comments section
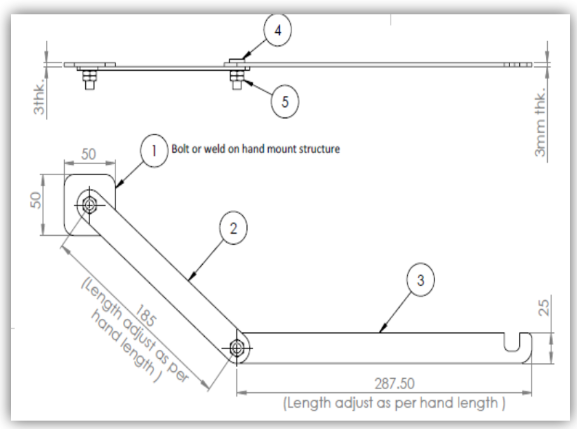
Mechanical Design, and CAD models:
The following mechanical structure was used:
- High tension Cable (1m long)
- 1 Mild steel plate, 5cm x 5cm, 0.2 mm thick
- 1 Aluminum plate, 30cm long, 30 cm wide, 0.8cm thick
- Custom aluminum pulley (8 cm dia, 2 cm groove)
- Custom made metal bolt (1.5cm long, half threaded 8mm dia)
- Nuts and bolts (3mm dia)
- Plastic washers
- M-seal for attaching the cable end with the pulley surface
- Mechanics game parts for holding the battery pack
- Wood planks (3mm thick for insulation between electronics and aluminum frame)
- Velcro Strips for fastening
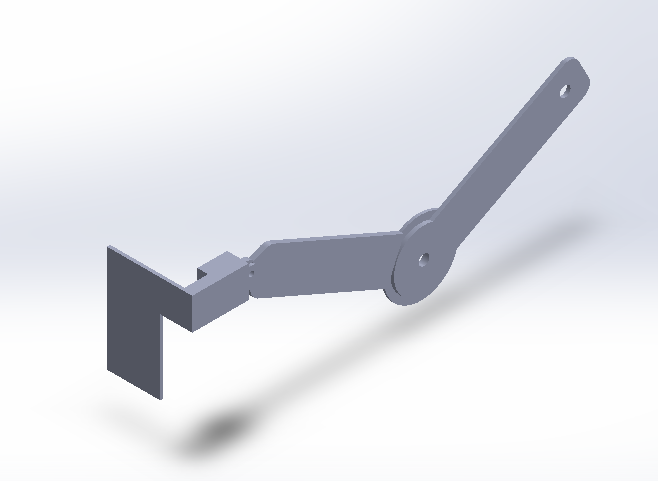
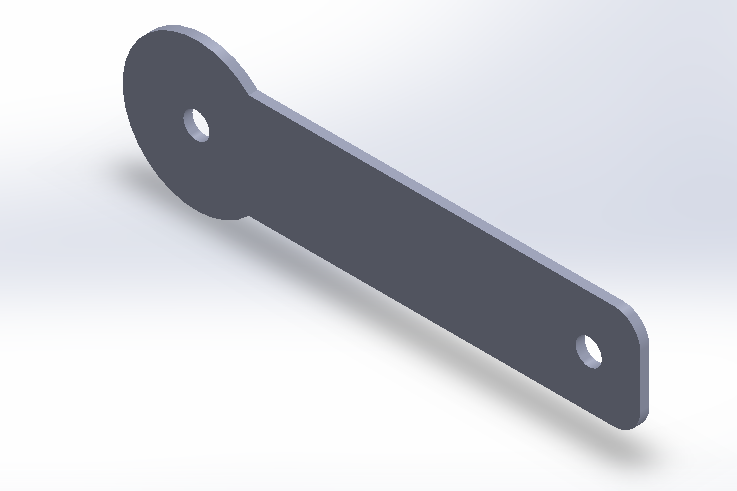
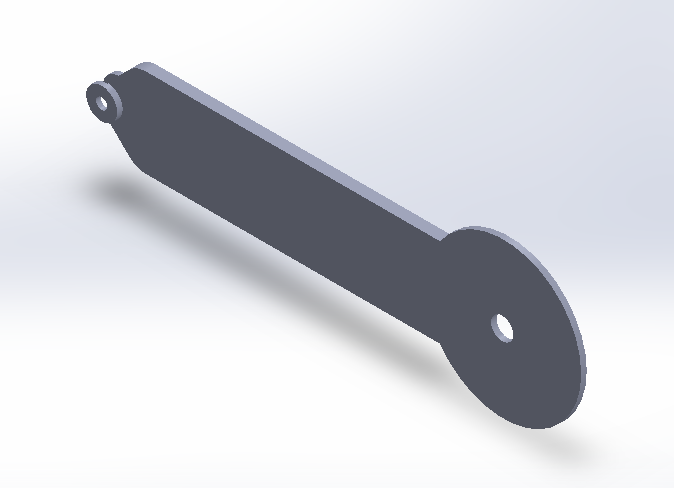
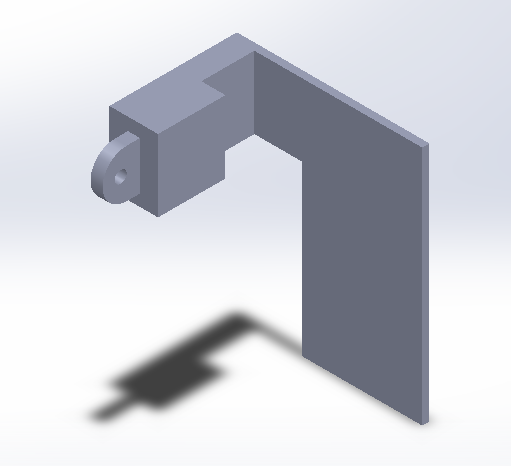
These steps were followed during CAD designing -
- The mechanical design has been made on SolidWorks, based on a simple 2 plate one fulcrum design
- The device can be worn using 3 velcro straps - one at the shoulder, one at the bicep and one at the forearm
- The motor provides a 90kgcm couple force which is transferred via a high tension cable wound on a pulley mounted on the motor's axle
- The cable also provides a tension force, which balances a part of the load weight
The following processes were used while manufacturing -
- Cutting & Drilling to shape the plate and make holes on it for bolting
- Welding and bending
- powder coating for coloring and finishing
- Lathe machining for cleaning and making custom pulley and bolt.
Precautions Taken -
- The entire device is padded so that the device does not hurt the user while moving.
- The first plate is fastened to the torso & fixed with respect to the user (once adjusted as per his comfort) for the ease of testing.
- Extra holes were drilled in the second plate so that the length can be adjusted as per the user's forearm length.
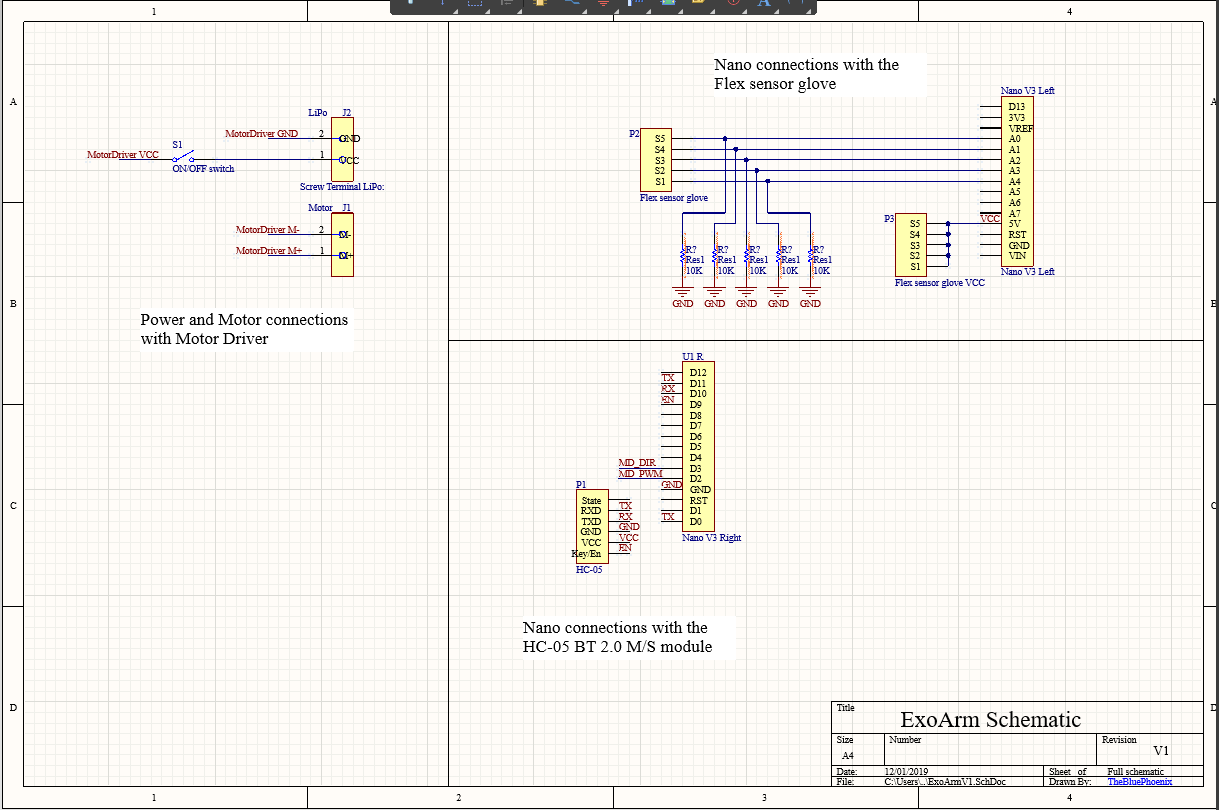
Hardware Aspects:
The Hardware of the project has been made using the Arduino Nano V3 or the STM32F103C8T6 based Bluepill board, a much cheaper and better alternative to the Nano V3.
The device can be activated or given commands using a variety of ways -
- Gesture control, using self-made flex sensors. Their development and design have been documented in a technical paper published in the DJ SPARK magazine on 13th April 2018 (ISBN 978-93-86724-75-5). Link to a local copy of the paper: https://drive.google.com/file/d/1xxz0v0EdJbowWiivLr9GejusyIOVBmkU/view?usp=sharing
- Bluetooth enabled voice control, using the BlueTalk app. It also sends alerts, SOS notifications and much more
- IoT enabled: It will make it possible to operate all IoT enabled devices in the house using the Exo-Arm
The schematic for Arduino Nano V3 is given below (For Bluepill, pins with the same functionality to be used):
The Flex sensor-based glove that was developed in-house is shown below (refer to the paper for details how it was made). This saved roughly 35-40$. The arm lifts the load till it is flexed, and stops when the flexing is stopped. As the glove is deflexed, the arm again moves back to its, position. The video shows its working and how it is to be used.
The glove used is shown below. Image taken from my technical paper on the design of this flex sensor glove.
The motor driver below is used to drive the high Torque DC motor, using CMOS based NO heatsink technology. It is small, light needs lesser control pins and can support a variety of motors (6.8V - 30VDC, 15A(continuous), 30A(peak)). It costs around $11 only.
The heavy-duty motor used below has low RPM (for easy speed control), and high torque (to increase the weight lifting capacity of the device). It costs less than $15
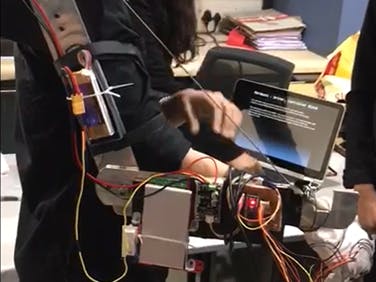
Working of the device:
The device can be easily worn using the three velcro straps. The device can be enabled using the ON/OFF switch. The voice control happens via BlueTooth module HC-05 which communicates with the android phone that the user speaks into, using the BlueTalk app. When the user says Start, the Voice control is enabled, and commands can be given as Up, Down and Stop. This lifts, lowers or stops the ExoArm, respectively. The User can also give commands using the Flex-glove. The user can flex the glove, to raise the load, and stop flexing it to stop raising the load. The user can straighten his glove to put the load down.
The video below shows the working of the ExoArm V1 in actual practical environments, at different places, with different weights (6 and 10kgs). It is also shown how voice-enabled commands can be used to control the ExoArm.
Conclusion:
New features related to IoT are being added, which help the user to control all the IoT enabled devices in the range. This is very helpful for the elderly. SMS alerts, fall detection and other such features have been incorporated in our project to increase the safety and monitoring of the aged when they are alone. This simple working of the device makes it an ideal choice for people with disabilities or those who need physical assistance. The same concept can be applied to the legs or to multiple limbs to increase the symmetry, divide the weight of the device and make walking faster and easier, along with empowering the user to lift more weight.
In case the device fails, the user can rest his arm over a table, remove the three velcro straps and let the exoskeleton rest on the table, as the user removes his arm. Hence it is very easy to wear and remove the suit.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

Comments
Please log in or sign up to comment.