A mobile robot for sensing airflow in indoor greenhouses, made by the Flobotics capstone team (2021) at Texas A&M University.
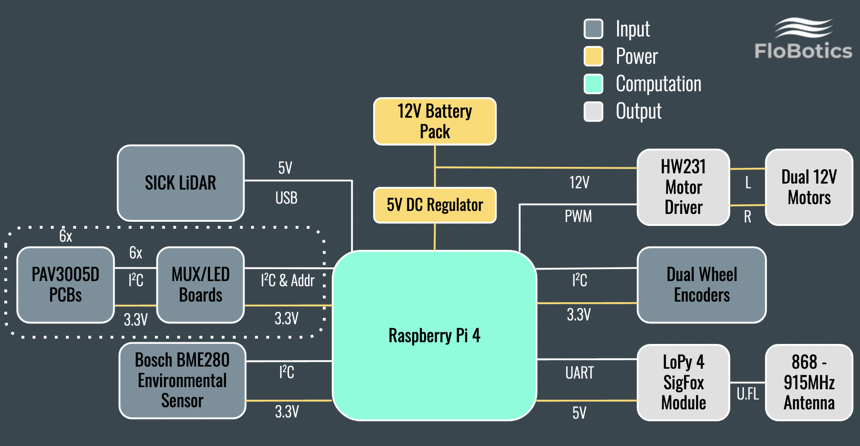
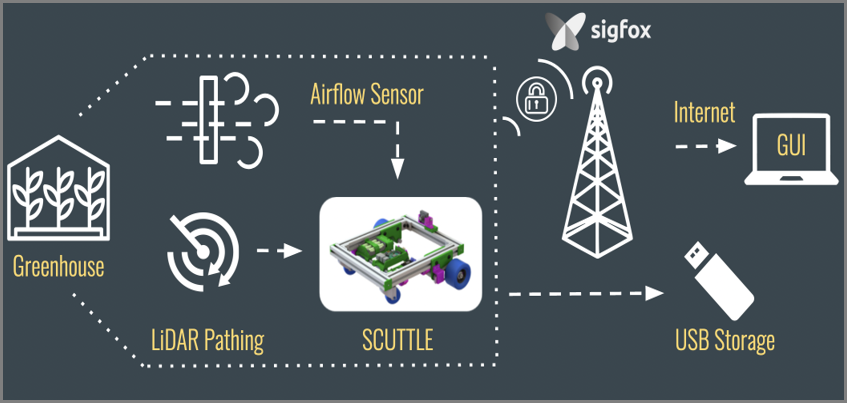
This robot design (named Ventus) automatically navigates through a facility to take measurments of air flow within a greenhouse. It's built on top of a SCUTTLE Robot platform, with a sensing tower added. The github code to generate a graphical representation of the airflow vectors in a map. The Ventus robot operates autonomously to measure indoor airflow, temperature and humidity all while creating grid of the greenhouse to graphically represent the airflow.



















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.