


Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 12 | ||||
| × | 1 | ||||
 |
| × | 4 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
| ||||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
| ||||||
Well, do you? Do you want a quadruped of your own. Cats are so '99. So, we got slow vimeo and fast youtube. Wait for the videos!
Fast motion is having troubles w/ sharing. It is on youtube.com at this link:
https://youtube.com/shorts/yU41aaOFv_0?feature=share...
So, w/ the help of many people, mostly a person on #beagle on IRC and a fellow named Ben, I have come to a small conclusion on a build.
This is my beat up, ole 3D Printer and a Recore board from iagent.no printing the parts needed to make this build of a quadruped available.
Oh! I also need to give credit to this person for making the files available for printing: Comments for 3D Printed Robot Dog by printedgadgets - Thingiverse and 3D Printed Robot Dog : 10 Steps (with Pictures) - Instructables.
Um...so back to business.
1. Print those files on your 3D Printer from Thingiverse.
2. Follow the instructions from that specific Instructables site.
3. Get the image for your BBB from https://forum.beagleboard.org/t/debian-11-x-bullseye-monthly-snapshots/31280.
4. w/ apt, downgrade to kernel 4.19.x. There are instructions on how to do it on the forums. Search around...I am sure you will find all sorts of interesting ideas, facts, opinions, and dealings in electronics around the am335x on the BBB and other boards that are produced for beagleboard.org.
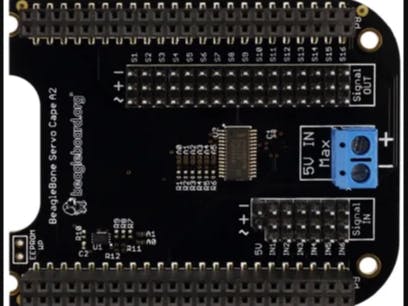
5. So, attach your Ethernet cable into your BBB, attach the ServoCape, and add power via the Micro USB cable to USB cable for the BBB. Note to self, adding the power to the Cape first off may be safer... We shall see (be careful around your batteries). Take extra precautions w/ them, i.e. as they are charged and full of current.
6. So, the DC-DC Converter handles a 12v 1.3A SLA AGM battery to 5v into the ServoCape screw terminals.
Note: See photo...
So, that is our hardware...
Now, for software.
1. We need to add the smbus2 lib. to the BBB (beaglebone black).
python3 -m pip install -U smbus22. Oh and once the image is installed and ported to the BBB, an update and upgrade is in order too!
3. The beagleboard.org people have just come out of GSoC mentoring. There was work done in GSoC for many different ideas and I found some of them to be useful.
4. Back to it! So, now we need to use apt in debian to "downgrade" the kernel from 5.10.x to 4.19.x for handling i2c on the BBB for use w/ the ServoCape and chatting w/ the chip, i.e. the PCA9685 on the Cape.
5. On the forums, you can find out how to install new kernels and update/degrade (timeless wise here) kernels to use what you choose. See here: https://forum.beagleboard.org/t/debian-10-x-11-x-kernel-updates/30928.
6. Once you have updated and upgraded and then downgraded to kernel 4.19.x, you can now use /dev/i2c w/ smbus2 in Python3 on the BBB to handle and talk to the PCA9685 on the ServoCape.
7. I will list a link at the bottom w/ some source to promote findings for using the PCA9685, i.e. mostly from IRC and Ben.
The library in the github.com link below will be GPL v3 licensed. I am trying to make it that way. So, I think this will be a good idea. It takes the burden off me and the use of the source w/ the PCA9685 on the ServoCape.
Enjoy...
Seth
P.S. If you find something that is not quite right or you want to test further, please promote your findings and retort. I am learning more about positioning of the quadruped legs as they cause interference w/ one another while promoting movement in specific angles and percentages of said angles.
For instance, I can alter the mechanics and source but it takes precision and time to know exactly what a good starting position for fastening the quadruped legs on the two servos is currently. I can set the angle to 0 degrees and then adjust the mechanics until fastened in the correct spot so, for instance, I can move to 50% of servoOne and 25% of servoTwo. This way, this correct spot, I will not have any interference on the different angles and percentages when altering the mechanics via software on the BeagleBone Black.
...



Comments
Please log in or sign up to comment.