/*
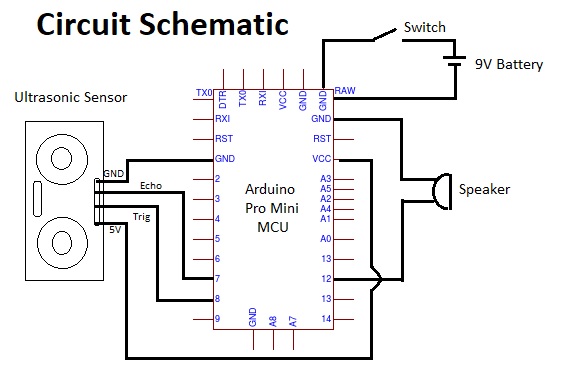
Arduino code used for the Ultrasonic Sensor Sunglasses
Jacob Gardner - 5th Grade STEM Engineering Project
*/
#define trigPin 8 // These lines assign names to values
#define echoPin 7 // so they can be easily identified.
#define buzzer 12 // These are set before the code
/* This section of code below runs only one time.
* It enables the serial monitor to see output and
* sets the pins to input or output.
*/
void setup() {
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(buzzer, OUTPUT);
}
/* The remaining part of the code runs in a constant loop.
* It triggers the ultrasonic sensor and calculates the
* time it took for the sound waves to return. It converts
* the time in milliseconds into distance in centimeters.
*/
void loop() {
long duration, distance;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration/2) / 29.1;
Serial.print(distance);
Serial.println(" cm");
// This part of the code below determines whether to
// beep depending on the distance detected. If the object
// is within 62 start the beeps.
if (distance > 30 and distance < 62) {
tone(buzzer,100,50); // Intermitten beeps
}
if (distance > 0 and distance < 31) {
tone(buzzer,100); // Long solid beep
}
else {
}
delay (500);
}















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.