


Hardware components | ||||||
| × | 2 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
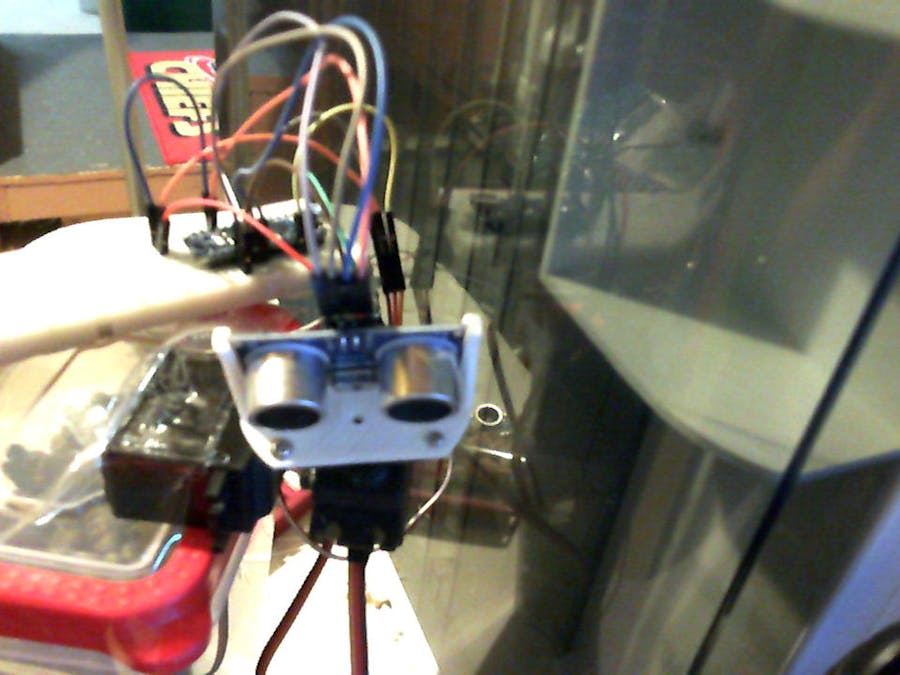
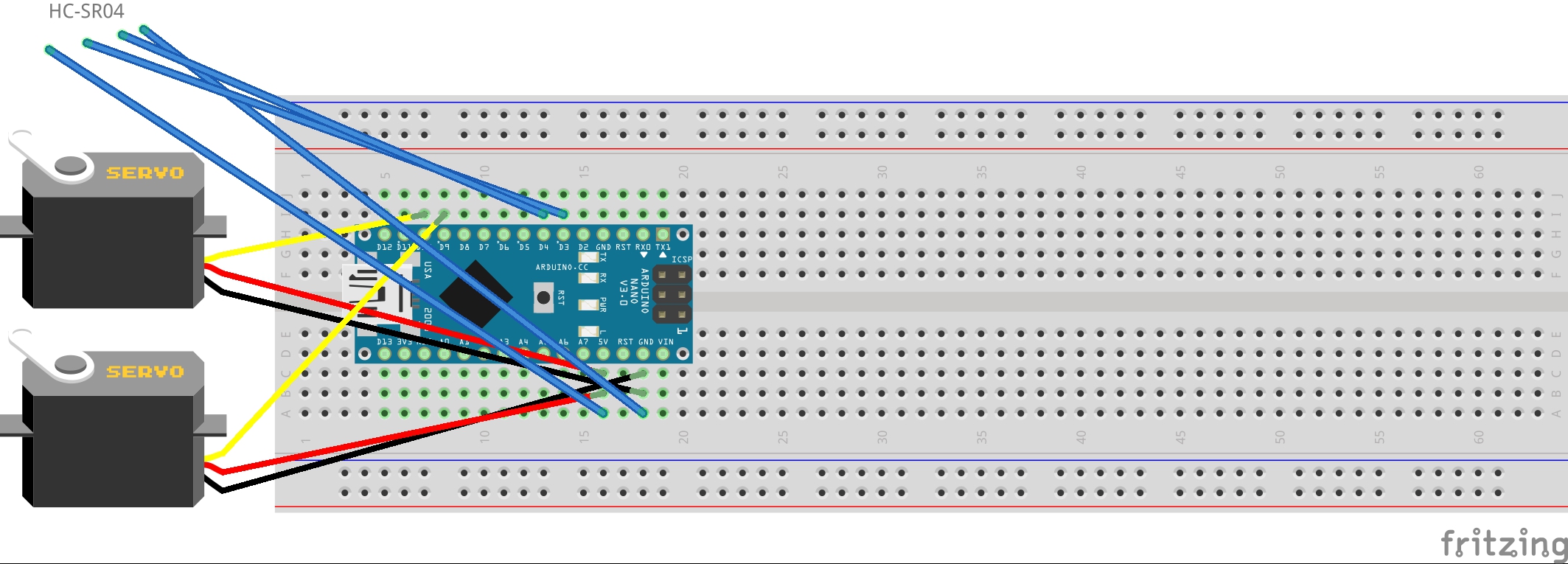
This project was made for fun. I was bored and as always, I needed to program something. I came across an idea for just a 2d radar. I wanted to expand upon this. So I created a program that enables you to scan an entire room without needing to use a laser. It works by scanning 100 degrees along the x plane, then going up by 1 degree at a time along the y plane. It then send data via serial to a processing computer running the python program.






{kind=link}
Comments
Please log in or sign up to comment.