


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
A while ago I saw a hourglass project online that I thought would be nice to build [1], after the tribulations of sourcing some missing files and getting the project to compile I found I didn't have the right accelerometer, the project required an ADXL343 and I had an ADXL345, so I decided to fork the code to that accelerometer [2].
I initially attempted to modify the code without making substantial changes but couldn't get it to work so I set about looking for a solution.
I eventually located a datasheet containing a block of code designed to keep a picture on a smartphone upright while you rotated it in your hand [3] and I built this project to test things out before modifying my hourglass project.
Initially it didn't work as I missed the fact that the orientation code works in g force and the Adafruit sensor library gives its results in m/(s^2), after realising this I used an online calculator to do a conversion which fixed the problem [4].
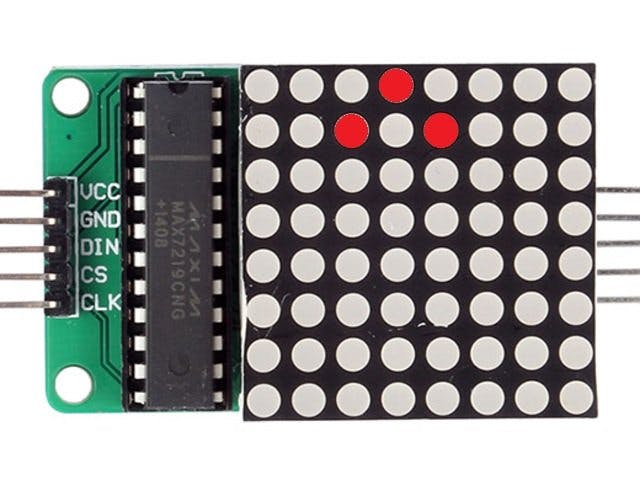
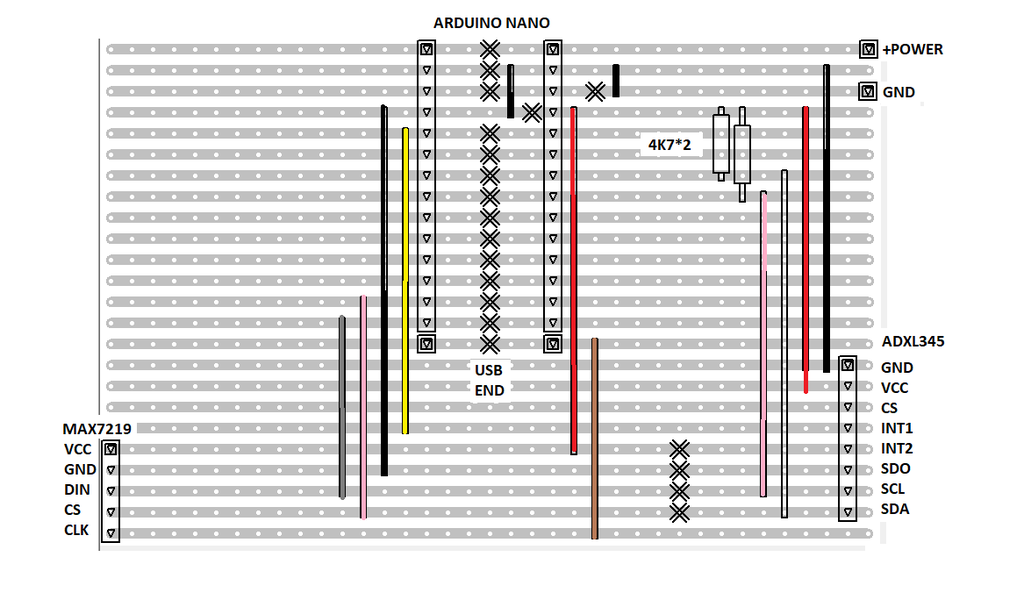
The board is one I had built for a previous project [5], it connects up an Arduino nano to a MAXX7219 display and an ADXL345 accelerometer.
There are 11 wires on top and 20 breaks on the underside of the board.
Reflecting on the build I now think it would have been better to use a right angle connector for the accelerometer; as things are currently set up you have to twist the board back to front to move through the sensed points rather than rotating it. I also added in a 0.1 inch 5 way socket to mount the display to the board.
Libraries:Adafruit_Sensor
Adafruit_ADXL345_U
LedControl
Wire
If you do not have any of these they can be downloaded via Sketch->Include Libraries->Manage Libraries...
Software:I modified the Adafruit ADXL345 sensortest.ino sketch by adding in the orientation code from the datasheet and code to run the matrix display.
References: (Checked Dec 2021):[1] https://www.instructables.com/Hourglass-Using-Arduino/
[2] https://github.com/Mr-Glenn/Arduino-Hourglass-ADXL345
[3] https://www.nxp.com/docs/en/application-note/AN3461.pdf

_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.