
Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
The idea for this project came from my daughter.
She wants a robot, and this robot can open its mouth so that it can put food in its mouth.
So, I searched indoors for things that were available: cardboard, Arduino Nano, ultrasonic sensor, servo motor... to be able to create a robot for girls to play in the fastest time, and at the lowest possible cost.
Create BodyI'm using cardboard to make body of robot
All parts of Body
Using hot glue to connect all the parts
Using hot glue to connect all the parts
The most of body done
Make eye holes
Make eye holes
Make mouth
Create a mouth with a paper knife
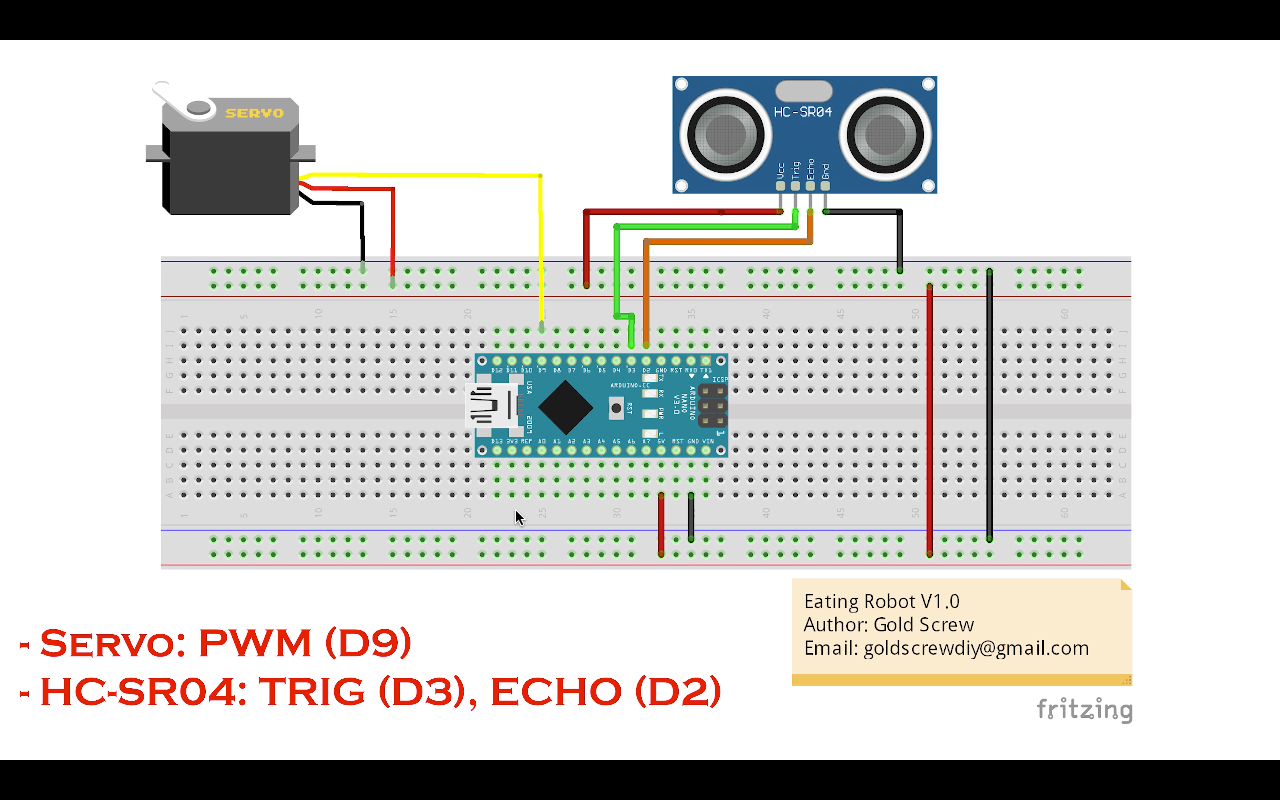
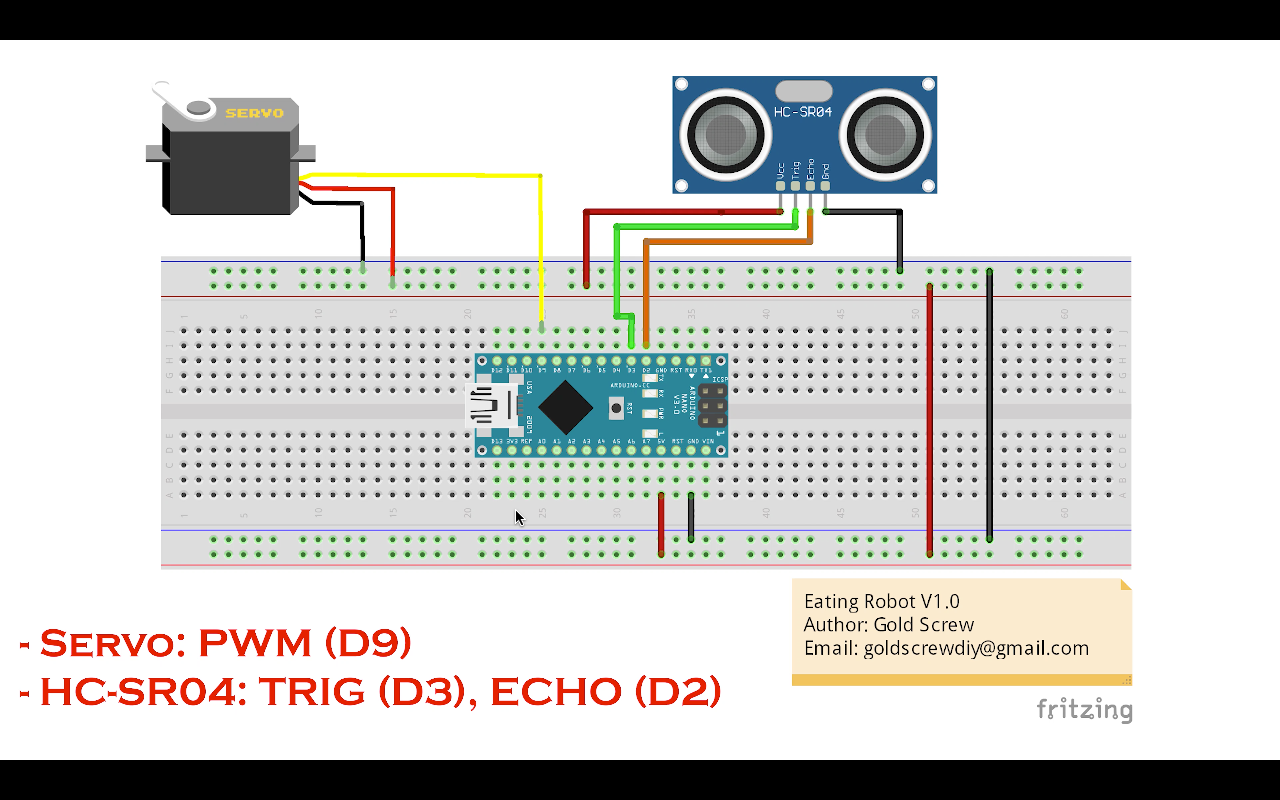
Components/parts connection diagram
Components connection diagram
Connect USB power
Connect USB Power
Testing and Debugging
Test distance
It's done!
Hi, I'm eating robot!




{kind=link}
Comments