

Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
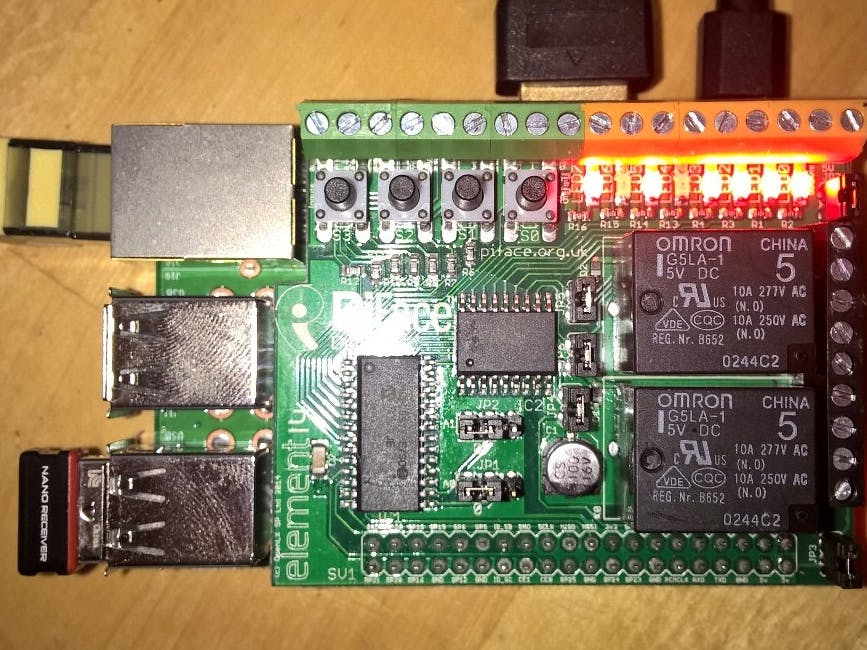
There is not much documentation on Pi Face Digital 2 board for the Raspberry PI. I could not find any on how to interface it to Windows 10, so I thought I'd nut the software out myself.
You can find some operating instructions here, and a very good linux operating guide here.
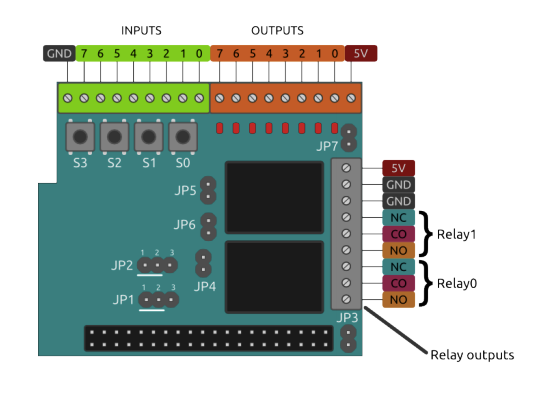
I used the data sheet for the MCP23S17 and a multi meter to determine the pin connects.
The code should work with the original PiFace Digital board as well. I've only included the source code for the driver and example main code (that reads the switches and output the values) It should be easy to integrate into other projects.
The INTB of the MCP23S17 passes through to GPIO25 of the Raspberry PI.
Event support has been added.
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using Windows.Devices.Enumeration;
using Windows.Devices.Spi;
using Windows.Devices.Gpio;
using Windows.Graphics;
namespace PifaceDigital2
{
public class PiFaceEventArgs : EventArgs
{
public byte PinMask { get; set; }
public byte PinState { get; set; }
}
public delegate void PiFaceInputChange(object sender, PiFaceEventArgs e);
public class PiFaceSpiDriver : IDisposable
{
// notes reset on the MCP23S17 is tied to 3.3V
// Block GPA is configured as inputs
// Block GPB is configured as outputs
// leave the IOCON.BANK = 0
private GpioController IoController = null;
private GpioPin InterruptPin = null;
private const string SPI_CONTROLLER_NAME = "SPI0"; /* For Raspberry Pi 2, use SPI0 */
private const Int32 SPI_CHIP_SELECT_LINE = 0; /* Line 0 maps to physical pin number 24 on the Rpi2 */
private const Int32 INTERRUPT_PIN = 25;
private const byte SPI_SLAVE_READ = 1;
private const byte SPI_SLAVE_WRITE = 0;
private const byte SPI_SLAVE_ID = 0x40;
private const byte SPI_SLAVE_ADDR = 0; // 0, 1, 2
private const byte IOCONA = 0xA;
private const byte IODIRA = 0x00;
private const byte IODIRB = 0x01;
private const byte GPPUA = 0x0C;
private const byte GPPUB = 0x0D;
private const byte GPIOA = 0x12;
private const byte GPIOB = 0x13;
private const byte OLATA = 0x14;
private const byte OLATB = 0x15;
private const byte DEFVALB = 0x7;
private const byte INTCONB = 0xB;
private const byte GPINTENB = 0x5;
private const byte INTFB = 0xF;
private const byte INTCAPB = 0x11;
private SpiDevice SpiDev = null;
public event EventHandler<PiFaceEventArgs> PiFaceInterrupt;
public async Task InitHardware()
{
IoController = GpioController.GetDefault();
InterruptPin = IoController.OpenPin(INTERRUPT_PIN);
InterruptPin.DebounceTimeout = new TimeSpan(0, 0, 0, 0, 50);
InterruptPin.Write(GpioPinValue.High);
InterruptPin.SetDriveMode(GpioPinDriveMode.Input);
InterruptPin.ValueChanged += Interrupt;
var settings = new SpiConnectionSettings(SPI_CHIP_SELECT_LINE);
settings.ClockFrequency = 10000000; // max frequency for MCSP23S17 is 10Mhz
settings.Mode = SpiMode.Mode3; // data read on the rising edge - idle high
string spiAqs = SpiDevice.GetDeviceSelector(SPI_CONTROLLER_NAME);
var devicesInfo = await DeviceInformation.FindAllAsync(spiAqs);
SpiDev = await SpiDevice.FromIdAsync(devicesInfo[0].Id, settings);
await Task.Delay(20);
Write(IOCONA, 0x28); // BANK=0, SEQOP=1, HAEN=1 (Enable Addressing) interrupt not configured
Write(IODIRA, 0x00); // GPIOA As Output
Write(IODIRB, 0xFF); // GPIOB As Input
Write(GPPUB, 0xFF); // configure pull ups
Write(DEFVALB, 0x00); // normally high, only applicable if INTCONB == 0x0xFF
Write(INTCONB, 0x00); // interrupt occurs upon pin change
//Write(INTCONB, 0xFF); // interrupt occurs when pin values become DEFVALB values
Write(GPINTENB, 0xFF); // enable all interrupts
Write(GPIOA, 0x55); // drive all outputs low
}
private void Write(byte address, byte data)
{
if (SpiDev != null)
{
byte[] buffer = new byte[3];
buffer[0] = SPI_SLAVE_ID | ((SPI_SLAVE_ADDR << 1) & 0x0E) | SPI_SLAVE_WRITE;
buffer[1] = address;
buffer[2] = data;
SpiDev.Write(buffer);
}
}
private byte Read(byte address)
{
if (SpiDev != null)
{
byte[] buffer = new byte[2];
buffer[0] = SPI_SLAVE_ID | ((SPI_SLAVE_ADDR << 1) & 0x0E) | SPI_SLAVE_READ;
buffer[1] = address;
byte[] read_buffer = new byte[1];
SpiDev.TransferSequential(buffer, read_buffer);
return read_buffer[0];
}
return 0;
}
public void WriteGPA(byte value)
{
Write(GPIOA, value);
}
public byte ReadGPA()
{
return Read(OLATA);
}
public byte ReadGPB()
{
return Read(GPIOB);
}
private void Interrupt(GpioPin sender, GpioPinValueChangedEventArgs args)
{
if (PiFaceInterrupt != null)
{
PiFaceEventArgs pfea = new PiFaceEventArgs();
pfea.PinMask = Read(INTFB); // find out what caused the interrupt
pfea.PinState = Read(INTCAPB); // read the state of the pins
PiFaceInterrupt(this, pfea);
}
}
#region IDisposable Support
private bool disposedValue = false; // To detect redundant calls
protected virtual void Dispose(bool disposing)
{
if (!disposedValue)
{
if(SpiDev != null)
SpiDev.Dispose();
if(InterruptPin != null)
InterruptPin.Dispose();
disposedValue = true;
}
}
~PiFaceSpiDriver()
{
// Do not change this code. Put cleanup code in Dispose(bool disposing) above.
Dispose(false);
}
// This code added to correctly implement the disposable pattern.
public void Dispose()
{
// Do not change this code. Put cleanup code in Dispose(bool disposing) above.
Dispose(true);
GC.SuppressFinalize(this);
}
#endregion
}
}
using System;
using System.Collections.Generic;
using System.IO;
using System.Linq;
using System.Runtime.InteropServices.WindowsRuntime;
using Windows.Foundation;
using Windows.Foundation.Collections;
using Windows.UI.Xaml;
using Windows.UI.Xaml.Controls;
using Windows.UI.Xaml.Controls.Primitives;
using Windows.UI.Xaml.Data;
using Windows.UI.Xaml.Input;
using Windows.UI.Xaml.Media;
using Windows.UI.Xaml.Navigation;
// The Blank Page item template is documented at http://go.microsoft.com/fwlink/?LinkId=402352&clcid=0x409
namespace PifaceDigital2
{
/// <summary>
/// An empty page that can be used on its own or navigated to within a Frame.
/// </summary>
public sealed partial class MainPage : Page
{
PiFaceSpiDriver spi_driver = new PiFaceSpiDriver();
private DispatcherTimer timer;
public MainPage()
{
this.InitializeComponent();
Init();
timer = new DispatcherTimer();
timer.Interval = TimeSpan.FromMilliseconds(100);
timer.Tick += Timer_Tick;
//timer.Start();
spi_driver.PiFaceInterrupt += Spi_driver_PiFaceInterrupt;
}
private void Spi_driver_PiFaceInterrupt(object sender, PiFaceEventArgs e)
{
int state = spi_driver.ReadGPB();
state &= ~e.PinMask;
state |= e.PinState & e.PinMask;
spi_driver.WriteGPA((byte)(~(state)));
}
private async void Init()
{
await spi_driver.InitHardware();
}
private void Timer_Tick(object sender, object e)
{
byte state = spi_driver.ReadGPB();
Status.Text = state.ToString();
state &= 0xAF;
spi_driver.WriteGPA(state);
}
}
}
14 projects • 81 followers
I'm a software developer on a long sabbatical. I've had wide experience from banking to underwater military sonar systems.




{kind=link}
Comments
Please log in or sign up to comment.