


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
 |
| |||||
Blinds can sometimes be a hassle. Having to get up and adjust them every time the sun comes out a bit more, or closing them to keep privacy at night can often be a chore. Therefore, we devised a solution, where the blinds will open and close automatically depending on how much light is outside the window, and open and close depending on the movement in a room.
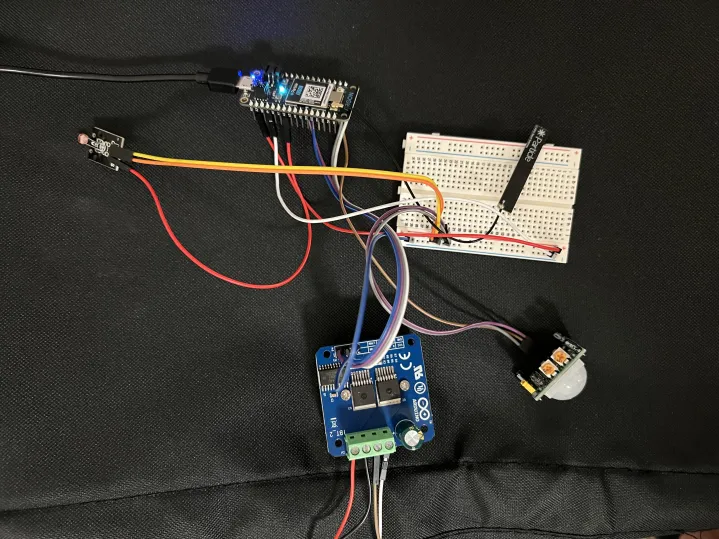
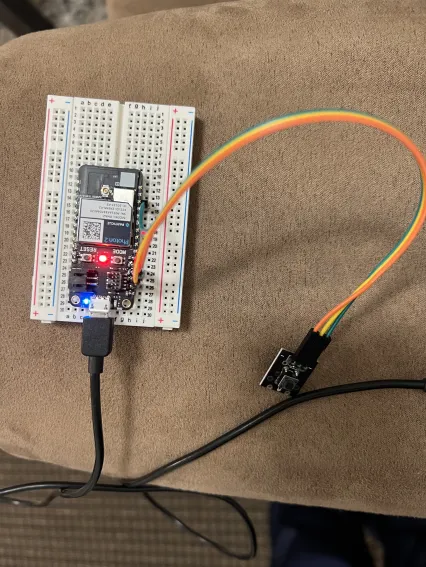
This project utilized a motion sensor, a light sensor, and a physical button on a wireless remote to close/open the blinds.
This project serves as a proof of concept for possible future use, and the hope is that this can be later revised and implemented into homes down the line.
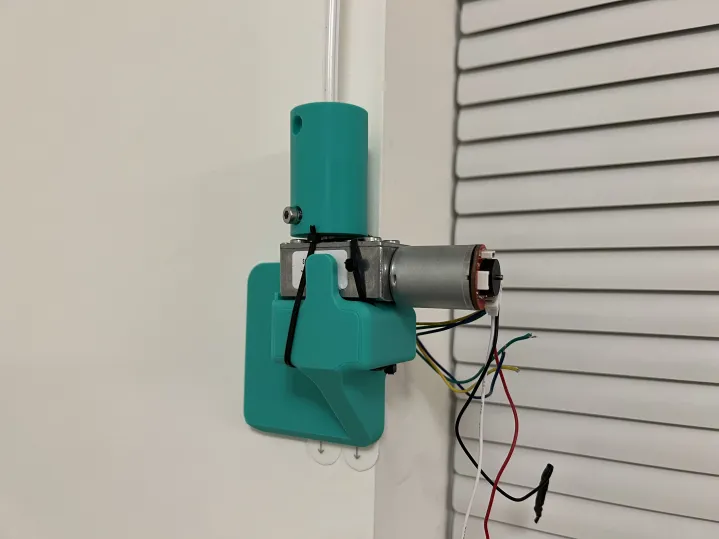
HardwareThe hardware we used in this project consists of the motor, the shaft coupling, and the motor bracket. The shaft coupling and the motor bracket were 3D printed and designed in Onshape. The shaft coupling connects the blinds rod to the motor with 2 screws and the motor mount attaches to the wall via a 3M command strip.
The motor is a 12V DC motor that is 30 RPM. We picked this motor because it has a lot of torque and low RPM which is convenient for opening and closing the blinds.
Other hardware we utilized was the sensors for this project. These all came from this sensor kit: https://www.amazon.com/ELEGOO-Upgraded-Tutorial-Compatible-MEGA2560/dp/B01MG49ZQ5/ref=sr_1_1_sspa?crid=3RL18F6IDH52O&keywords=sensor%2Bkit&qid=1701143007&sprefix=sensor%2Bkit%2Caps%2C97&sr=8-1-spons&sp_csd=d2lkZ2V0TmFtZT1zcF9hdGY&th=1
CodeLogic
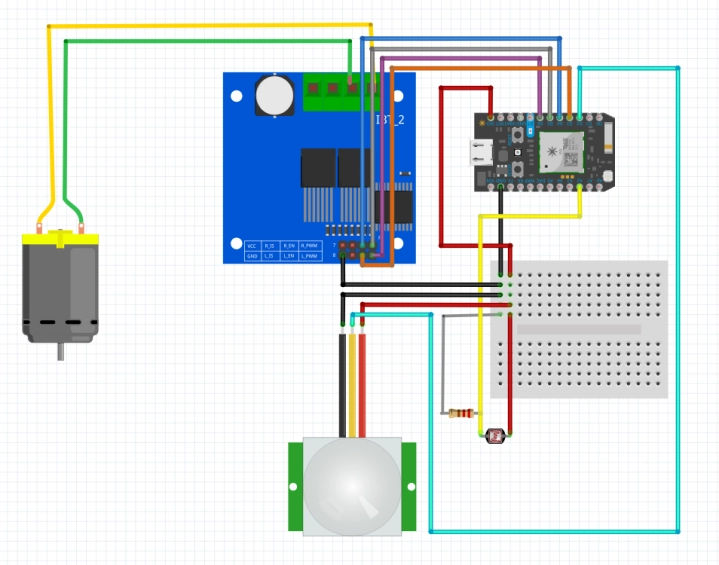
The way the logic of the systems works is that if there is any motion detected with the motion sensor, the blinds will automatically close or open. The motor is turned on for a specific amount of time and because it is a high torque low RPM motor we were able to get consistent position control through timing only. The light sensor will trigger the system when the light in the room is too bright past a threshold. The idea is that when it gets light out in the day, the blinds will close to keep the temperature cool in the house. All while this is running, the code is logging the motion sensor and light sensor values to Adafruit.IO for graphing purposes. Additionally, the code is looking for manual control via the particle console text commands and also the physical button signal if the user wants to control the blinds themselves. Signals are sent back and forth between the 2 particles whenever a state is changed in the blinds. The RGB LED on the remote will change based on the state of the blinds (open or closed).
VideoSchematicsLight Sensor
Motion Sensor
Motor Stay 3D Model
Motor Coupling 3D Model








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments