The general motivation behind this project came to us as pet owners who want to be alarmed by disasters or unwanted scenarios as early as possible. To this end it was decided to use microphone module sensors, both big and small, to encompass a range of audio signals. The big sound sensor will be configured to pick up on sounds that may come from thumps, crashes, or clangs produced by a bigger pet like a dog for example, while the small sound sensor will pick up on small sounds, like the ones produced from a parrot gnawing on window blinds or a cat scratching furniture.
How it worksDevice A belongs to David and Device B belongs to Luke. Device A is connected to the big sound sensor and actively senses noise up to a certain threshold which is then sent to Device B. Device B is connected to the small sound sensor and picks up on sound also up to a certain threshold and sends this data to device A. This is done through connection of the internet by both devices linked to the particle cloud. Subscribing and publishing functions make this possible. To ensure data is sent through the cloud we used the D7 led lights on both devices as indicators that ensure bidirectional communication. Simply, detection from device A turns on the D7 LED light on device B, and visa-versa.
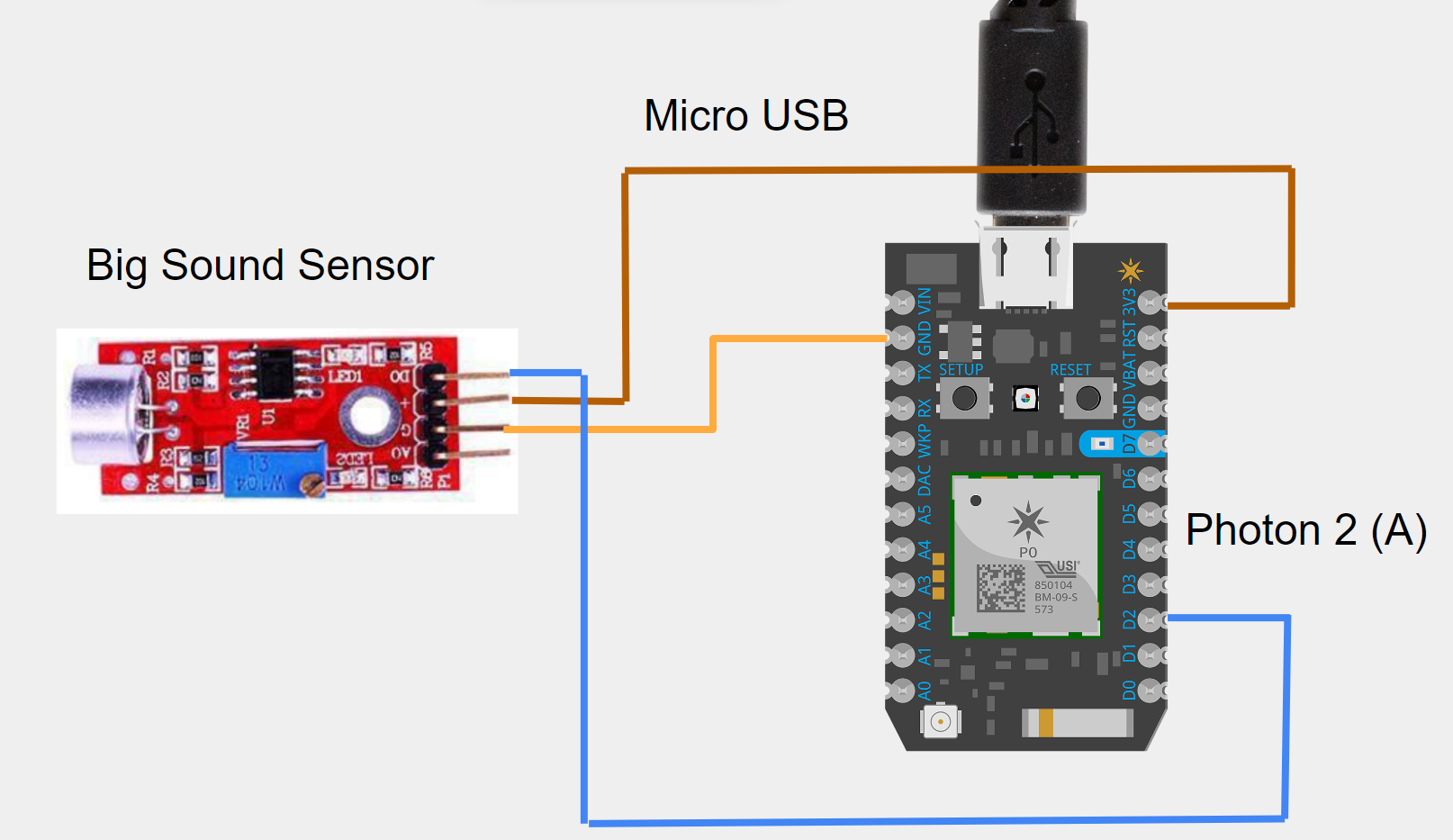
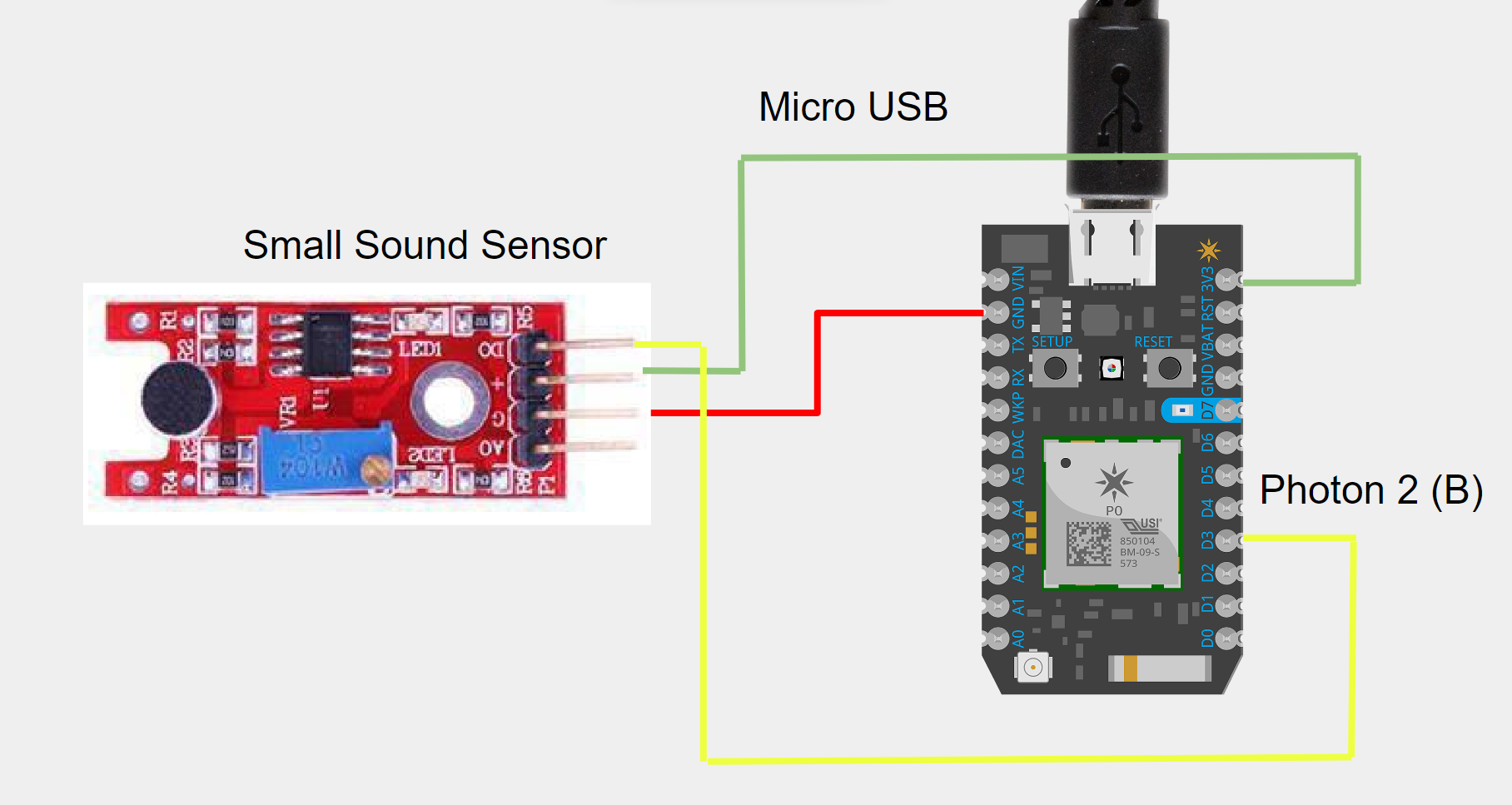
The voltage supplied by the 3v3 pin in the particle devices powers both of the sensors (3.3V - 5V) and the digital output pins of the big and small sound sensors are connected to input pins D2 and D3 respectively. This is shown more in depth in the circuit diagrams.
The following figures are pin diagrams for the big and small sound sensors
Figure 1: Big sound sensor diagram
Figure 2 : Small Sound sensor diagram
Figure 3: Device A configuration
Figure 4: Device B Configuration
We used Thingspeak to display the sound data received from both the big and small sound sensors on graphs. The two images below are the field charts for the big microphone and small microphone respectively.
Project VideoFlow ChartFigure 5: Project Flow Chart
















{kind=link}
{kind=link}
Comments