We studied the level of activity in our school's counseling department because we wanted to know how many people go to the counseling department without seeing their counselor (like asking the receptionist a simple question or for a form). To do this, we used an ultrasonic range sensor which would detect when someone passed by it.
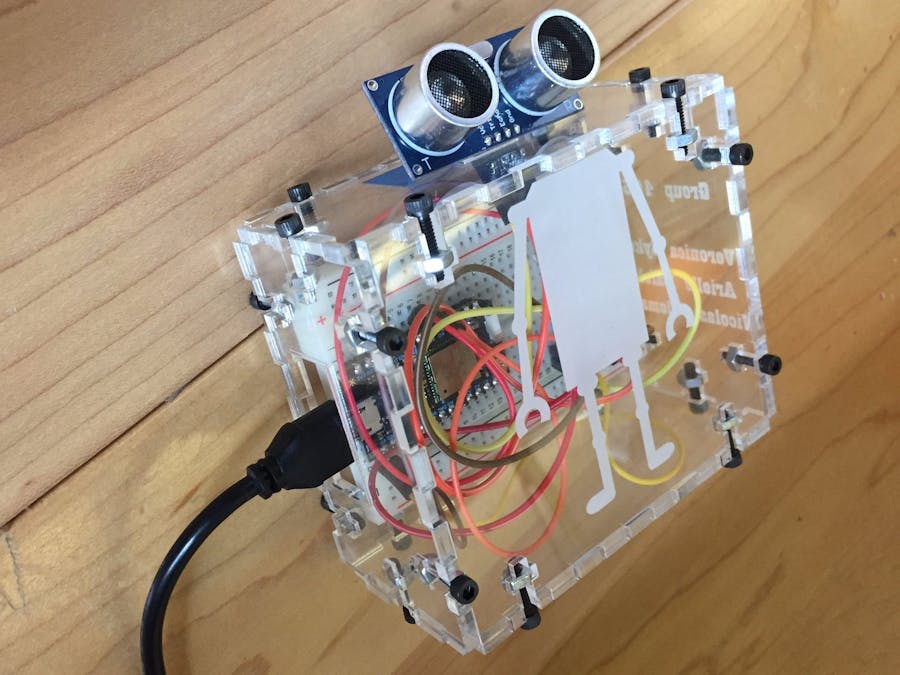
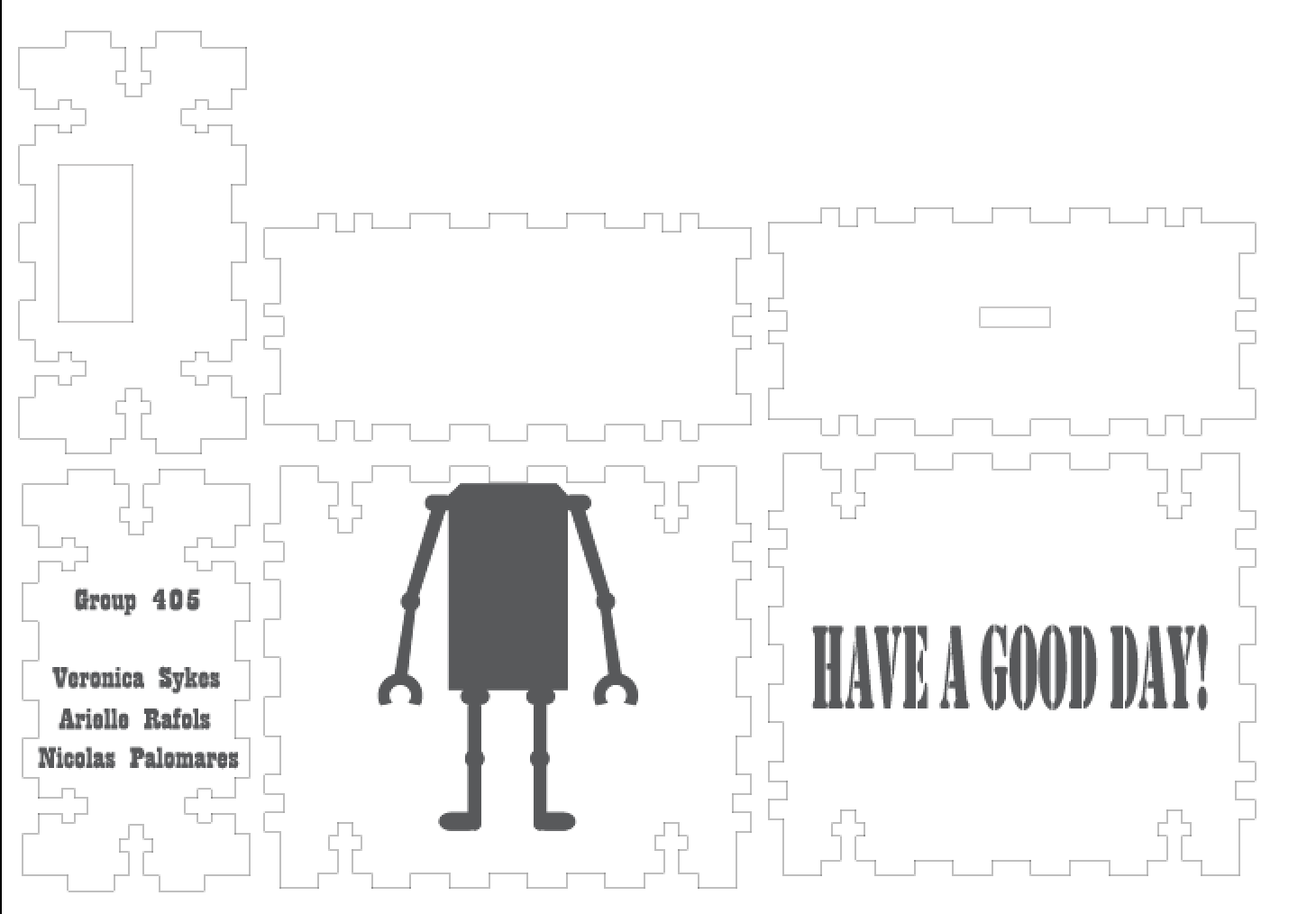
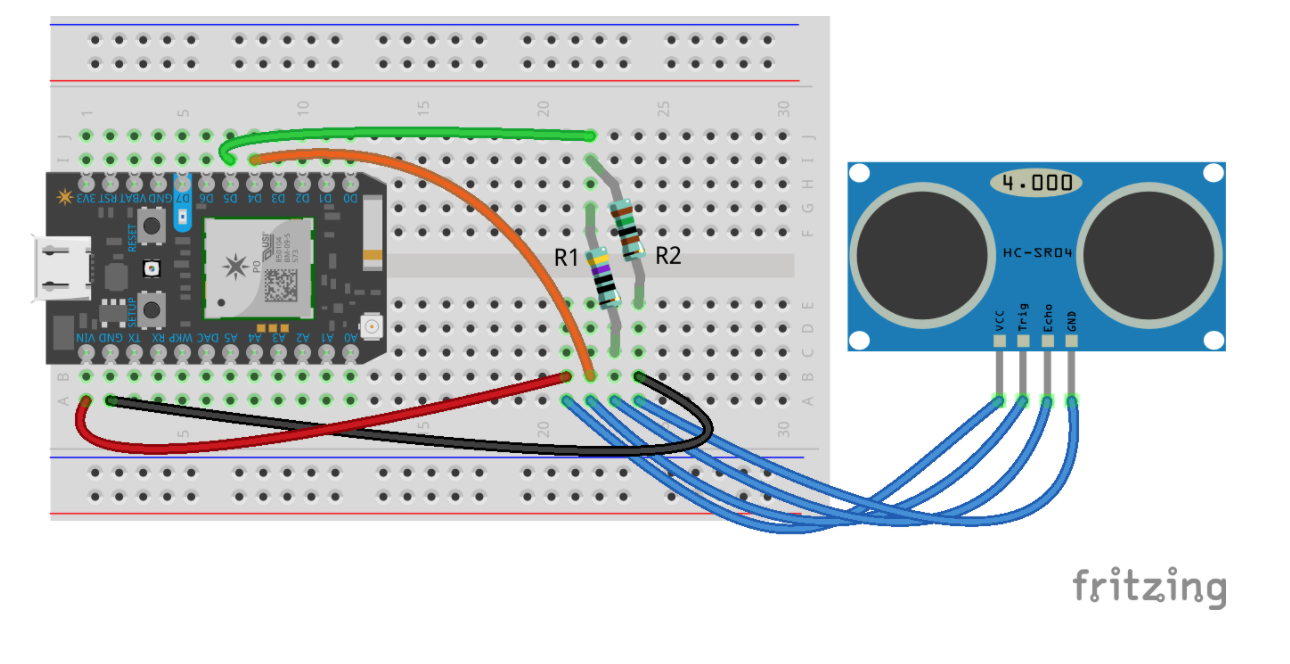
The first step to building our enclosure was starting with a rough sketch of it. After learning we could connect sensors without mounting them directly on the breadboard, we made adjustments to our measurements. Then we constructed the enclosure out of cardboard to visualize what it would be like and make sure everything would fit together. Our breadboard consists of a Particle Photon and jumper wires connecting an HC-SR04 ultrasonic range sensor.
1 / 6 • This was our enclosure sketch before we learned we could mount our sensor apart from the breadboard.
To set up our photon and code, we all had to make accounts on particle.io. After many failed attempts to make code work from online tutorials for the HC-SR04 sensor, our teacher Mr. Solin developed working sample code. To that, we added code provided by Mr. Law to connect our data stream to Phant's database.
We faced challenges with coming up with the initial concepts for our project, coding, and our Photon randomly going offline. We also worried about how the sight of our project might cause additional stress to people visiting their counselor because it is a random robot-looking machine whose use is unknown to them. A small issue we had was forgetting to consider how our enclosure would be mounted on the wall. We ended up putting it sideways. In the history of this program, enclosures were known to be vandalized, stolen, or dropped from their mounts, but we faced no challenges with those.
1 / 2 • Finished project mounted by the counseling department's entrance.
Through this project, we learned how breadboards, Particle photons, and Google Sheets work and how to use them. If we had gotten our sensor to work sooner and collected more data, we could have used the information we gathered to help inform fellow students when might be the idealist time to visit the counseling department.

















{kind=link}
{kind=link}
Comments