


Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 3 | ||||
| × | 2 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 2 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 6 | |||
| × | 2 | ||||
 |
| × | 2 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
Software apps and online services | ||||||
_9nsOFQ7ama.png?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| |||||
 |
| |||||
 |
| |||||
| ||||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
| ||||||
 |
| |||||
| ||||||
| ||||||
Renewable energy is a practical, affordable solution to our electricity needs. By ramping up renewable energy, we can reduce air pollution, cut global warming emissions, create new jobs and industries, diversify our power supply, decrease dependence on coal and other fossil fuels and move the World toward a cleaner, healthier energy future. We intend to create a lighting control system that allows us to save energy. Lighting control systems are widely used on both indoor and outdoor lighting of commercial, industrial, and residential spaces. Lighting control systems serve to provide the right amount of light where and when it´s needed.
As main goals, I have three things in mind:
- Generating a control PWM signal from a Sine function.
- Generating a control PWM signal from a PID controller.
- Add a Night Light Control.
Applications: “Night Light Control” in our home, business or even on public roads or “Street Light Control”. It can also be used to charge 3V, 5V and 12V batteries.
STM32F407G-DISC1 Configuration
- STM32F407VGT6 microcontroller featuring 32-bit ARM® Cortex®-M4 with FPU core, 1-Mbyte Flash memory, 192-Kbyte RAM in an LQFP100 package
- On-board ST-LINK/V2 on STM32F4DISCOVERY or ST-LINK/V2-A on STM32F407G-DISC1
- USB ST-LINK with re-enumeration capability and three different interfaces: Debug port, Virtual Com port, and Mass storage.
- Board power supply: through USB bus or from an external 5 V supply voltage
- External application power supply: 3 V and 5 V
- LIS302DL or LIS3DSH ST MEMS 3-axis accelerometer
- MP45DT02 ST-MEMS audio sensor omni-directional digital microphone
- CS43L22 audio DAC with integrated class D speaker driver
- Eight LEDs
- Two push-buttons (user and reset)
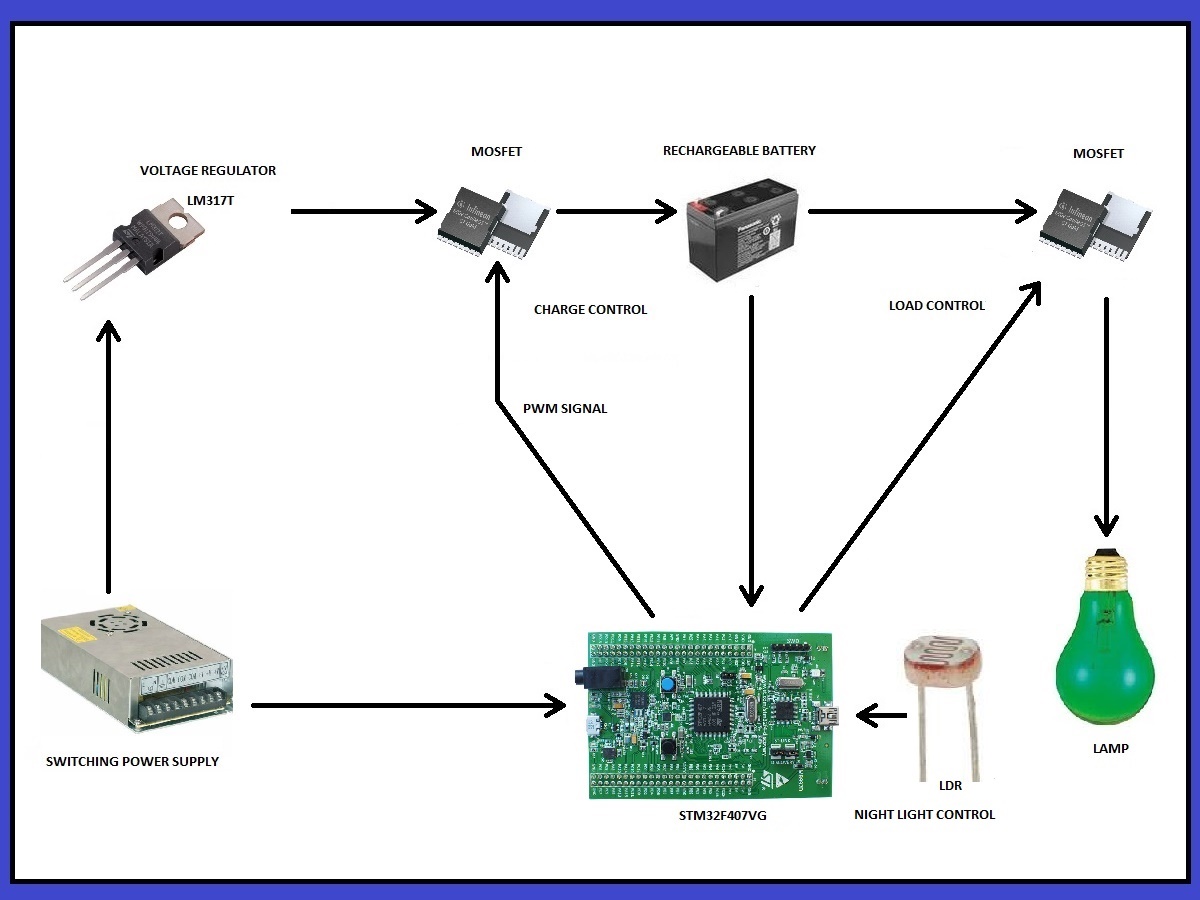
As we can see in the schematic diagram, this system mainly performs two functions: first it´s dedicated to charge the battery, and once fully charged, then turn on or off a lamp by means of a LDR light sensor, if it´s at night turn on the lamp and if it´s daylight, turn it off. For a better description of this project, I have divided it into the following sections:
1.- Software Installation
2.- Power Supply
3.- Charge Control
4.- Load Control
5.- Night Light Control
6.- Generating a control PWM signal from a Sine function
7.- Generating a control PWM signal from a PID controller
8.- Circuit Board Deseigns
9.- Assembly
10.- Tests
11. Conclusions
(Timing: 6 hrs)
I use the Windows 10 operating system at 32 bits and the software installation is as follows:
a) I have installed "GNAT Programming Studio", and we can download it from the following link: https://www.adacore.com/download/more
In this link I have downloaded and installed the following two programs:
b) We have to install the USB driver of the STM32F407VG board, the link is as follows: https://www.st.com/en/development-tools/stsw-link009.html#getsoftware-scroll. On this site we download the following file: "en.stsw-link009.zip". Once connected the device we verify that it is connected in "Device Manager".
c) To develop this project we work with "Ada Drivers Library", and we can download it from the following link: https://github.com/AdaCore/Ada_Drivers_Library
To design my project, I used the following examples: "demo_timer_pwm", "demo_adc_polling" and "demo_gpio_direct_leds". The folders you can find here: https://github.com/AdaCore/Ada_Drivers_Library/tree/master/arch/ARM/STM32/driver_demos
d)CircuitMaker is electronic design automation software for printed circuit board designs targeted at the hobby, hacker, and maker community. The installation software you can download it in: https://circuitmaker.com/
e) PID example By Lowell Cady, is a working example of a PID (Proportional, Integral, Derivative) control and you can download here: https://www.codeproject.com/Articles/36459/PID-process-control-a-Cruise-Control-example
(Timing: 2 hrs)
How does it work?
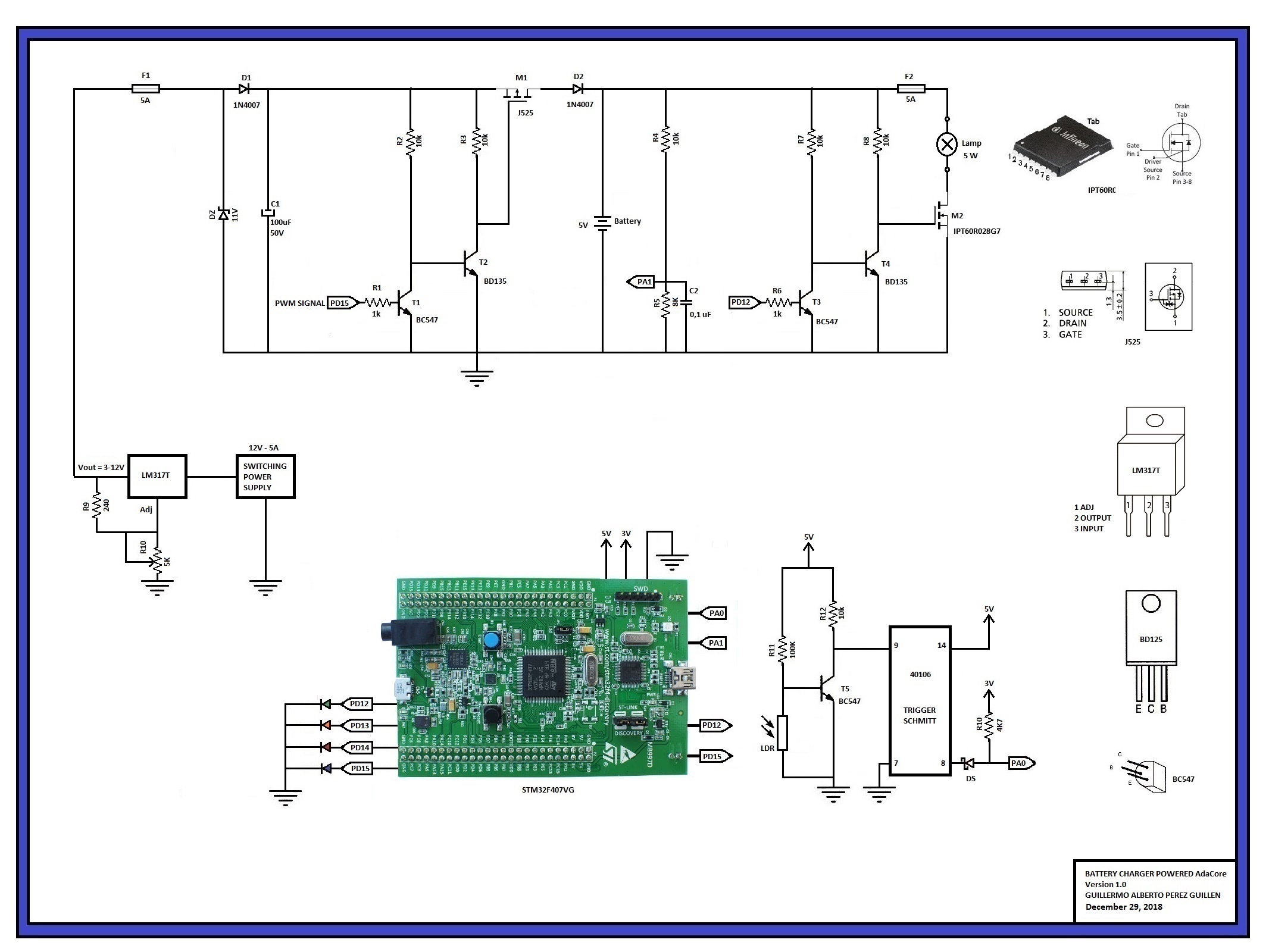
a) The switching power supply provides a stable voltage of 12 Volts DC, 5 Amps and a maximum power of 330 watts. With this device, we will find good stability of the system and we have to adjust the voltage load with which we want to charge our battery and using a potentiometer (R10). We can consult international standards here: https://standards.ieee.org/standard/765-2012.html
b) The integrated circuit LM317 was used to generate a voltage regulated from 3 to 12 volts by means of potentiometer R10. The technical specifications of this integrated say that it can´t generate less than 3 volts. In this example, I adjust 5.6 volts. The calculations are:
In the technical sheet of LM317 we find the following formula:
Vout =Vref [1+(R2/R1)] +(iADJ)(R2)
For example, the maximum voltage that the LM317can works is 37 Volts, and if in our diagram we take R9 as 240 ohms, then we do the calculation for R10.
Vout =Vref [1+(R10/R9)] +(iADJ)(R10)
We consider a very small value of iADJ, and if we calculate R10, we would have:
R10 = (R9/Vref) (Vout -Vref)
R10 = (R9/1, 2) (Vout - 1, 2)
R10 =(240/1, 2)(37-1, 2) = 7, 160 ohms
And for practical uses, we use a 10k potentiometer.
c) The Zener diode DZ serves as a voltage regulator and at it´s output I obtained a maximum of 10.8 volts, which I measured with a voltmeter.
d) The protection devices used are the following: Fuse F1, Capacitor C1 and Diode D1. These elements are very important to protect the system against short circuits, discharges, elimination of reverse direct currents and filter against unwanted signals.
(Timing: 3hrs)
How does it work?
a) The voltage measured in Vcc in this circuit with the voltmeter indicated 5, 45 volts. In this example I´m using a module of four rechargeable batteries of 1, 5 volts. The maximum load voltage will be 5.6 volts. I used Nickel Metal Hydride Batteries, and we can find the international standards here: https://www.mpoweruk.com/standards.htm
b) The PWM signal generated by the STM32F407VG board will be used to regulate the load that goes to the rechargeable battery. To generate this PWM signal, we take the example "demo_timer_pwm" from "Ada Drivers Library" and modify it to obtain our desired PWM signal. For example, if the battery is completely discharged, then the PWM signal has a large duty cycle.
c) Transistor T1 was used to physically separate the STM32F407VG board and the M1 Mosfet. If they were directly connected, then this device would be damaged, since the Mosfet works with very high loads. The resistance R1 (1k) must be of a low value to increase the switching speed of the PWM signal.
d) However, at the output of transistor T1 we have an out-of-phase signal 180 degrees, and to adjust this situation, we make use of transistor T2, and now the PWM signal is in phase.
e) To drive the cutt-off and saturation regions to our T1 and T2 transistors, we make the following considerations:
To determine the saturation current, we consider the emitter collector voltage of the output grid equal to zero. Thus:
VCC=IC*RC+VCE | VCC=IC*RC+0
IC=VCC/RC
To determine the cutt-off, we consider that the base current is equal to zero, therefore the collector current is equal to zero:
VCC=IC*RC+VCE | VCC=0*RC+VCE
VCE=VCC
f) The protection devices used are the following: Capacitor C1 and Diode D2. The diode serves to eliminate the reverse direct currents of the battery when it is fully charged. If this diode didn´t exist, then the battery would induce voltages in the transistors T1 and T2.
(Timing: 3 hrs)
How does it work?
a) Resistors R4 of 10K and R5 of 8K serve us as voltage dividers to measure the charge of the rechargeable battery with our STM32F407VG board. The 8K resistance is achieved with two resistors in series: 4k7 + 3k3. The value of VR5 we obtain it by means of the calculation of a voltage divider, this would be: VR5=(R5/(R4+R5))*VBattery)
b) When the PD12 pin of the STM32F407VG board is up, then the transistor T3 drives and is out of phase 180 degrees. Transistor T4 corrects transistor T3 and puts the original signal in phase with the PD12 pin.
c) To drive the cutt-off and saturation regions to our T3 and T4 transistors, we make the following considerations:
To determine the saturation current, we consider the emitter collector voltage of the output grid equal to zero. Thus: IC=VCC/RC
To determine the cutt-off, we consider that the base current is equal to zero, therefore the collector current is equal to zero: VCE=VCC
d) When the pulse arrives at the "Gate" pin of the IPT60R028G7 Mosfet, then the circuit between "Source" and "Drain" is closed and the 5-watt lamp is turned on. This MOSFET transistor enters the saturation zone when the voltage between the Drain and the Source (VDS) exceeds a fixed value called saturation voltage (Vds sat). That is to say; the MOSFET will be in this region, when:
VGS > Vty VDS > (VGS – Vt).
In the technical sheets of the IPT60R028GT we see that:
Gatethreshold voltage
V(GS)th Minimum = 3
V(GS)th Typical = 3.5
V(GS)th Maximum = 4 V
Therefore, we require 3 to 4 volts in "Gate" to put the Mosfet IPT60R028GT in the saturation region.
e) The protection devices used are the following: Capacitor C2 and Fuse F2.
(Timing: 3 hrs)
How does it work?
a) This “Night Light Control” serves us, to know if it´s day or it´s night and activate the lamp. This circuit is powered with 5 volts from the STM32F407VG board.
b) To take control of the lighting we´re making use of a photoresistor or LDR sensor. A photoresistor is made of a high resistance semiconductor. In the dark, a photoresistor can have a resistance as high as several megohms (MΩ), while in the light, it can have a resistance as low as a few hundred ohms. https://en.wikipedia.org/wiki/Photoresistor
c) When there is total darkness, the LDR sensor has maximum resistance (meghoms), the T5 transistor is polarized and at it´s output we have minimum voltage, and at the output of the inverter circuit (IC40106) we have 5 volts. The IC40106 is a Trigger Schmitt inverter circuit. In the following figure we can appreciate how a non-inverter circuit works, which helps us to understand how the inverter circuit 40106 works. These circuits are useful when you want to take control of a digital circuit with signals that are not digital.
Values of VT and VT- for the 40106 (all values are in volts)
d) We convert this 5 volts to 3 volts by means of a Schottky diode as shown in the circuit and we apply this voltage to the PA0 pin of our STM32F407VG board.
e) When there is maximum illumination, then the opposite happens. The LDR sensor has minimum resistance, the T5 transistor isn´t polarized and at it´s output we have the 5 volts of Vcc, which enter through pin 9 of the IC40106 inverter circuit. Finally we have 0 volts, which are applied to the PA0 pin of the STM32F407VG board.
f) To drive the cutt-off and saturation regions to our T5 transistor, we make the following considerations:
To determine the saturation current, we consider the emitter collector voltage of the output grid equal to zero. Thus: IC=VCC/RC
To determine the cutt-off, we consider that the base current is equal to zero, therefore the collector current is equal to zero: VCE=VCC
g) On the PA0 pin of the STM32F407VG board, when we have zero volts, then the red LED lights up and the lamp turns off. When we have 5 volts the green LED turns on and the lamp turns on.
(Timing: 1day)
On this board, we are going to generate the PWM Control signal, activate the load, and monitor the voltage of our battery and the status de our “Night Light Control”. We will also use its 4 LEDs as indicators of the status of my system. You can find the program in the Code section. Project repository: "Battery Charger With Night Light Control"
How does it work?
a) We monitor the battery voltage on the PA1 analog port, where we have values from 0 to 4095 ADC.
b) The PWM signal is generated on the STM32F407VG board by means of the interruption in Timer4 and the generation of a sine function of 30 kHz. In our code we indicate it with the following instructions:
Arg := Long_Float((Raw*5)/4095); -- 5 is an experimental value
Value := Percentage (50.0 * (1.0 +Sine (Arg))); -- duty cycle value
Power_Control.Set_Duty_Cycle (Value);-- PWM signal
We will adjust the duty cycle gradually according to the sine function.
The sine function is calculated with the following code:
function Sine (Input : Long_Float) return Long_Float;
-- In this demonstration we roll our own approximation to the sine function
-- so that it doesn't matter which runtime library is used.
function Sine (Input : Long_Float) return Long_Float is
Pi : constant Long_Float := 3.14159_26535_89793_23846;
X : constant Long_Float := Long_Float'Remainder (Input, Pi * 2.0);
B : constant Long_Float := 4.0 / Pi;
C : constant Long_Float := (-4.0) / (Pi * Pi);
Y : constant Long_Float := B * X + C * X * abs (X);
P : constant Long_Float := 0.225;
begin
return P * (Y * abs (Y) - Y) + Y;
end Sine;
https://visualgdb.com/tutorials/arm/stm32/fpu/
This code generates the following three duty cycles necessary for my project, as shown below:
A duty cycle is the fraction of one period in which a signal or systemis active. Duty cycle is commonly expressed as a percentage or a ratio. A period is the time it takes for a signal to complete an on-and-off cycle. As a formula, a duty cycle (%) may be expressed as: D= (PW/T)x100%
where D is the duty cycle, PW is the pulse width, and T is the total period of the signal. https://en.wikipedia.org/wiki/Duty_cycle
c) The value of VR5 we obtain it by means of the calculation of a voltage divider, this would be: VR5=(R5/(R4+R5))*VBattery)
d) If the battery is less than approximately 4 volts, then the red LED lights up and the green and orange LEDs turn off. In this example, we have values less than 2457 ADC.
e) If the battery is more than approximately 5.4 volts, then the orange LED turns on and the red LED turns off. In this example, we have values greater than 3276 ADC.
f) If the STM32F407VG receives a pulse from the PA0 port, then the green LED lights to indicate that it is night and the lamp turns on via the PD12 pin.
g) If the battery is between 4 and 5.4 volts approximately, then the orange and red LEDs light up. In this example we have values from 2475 to 3275 ADC.
if Raw < 2457 then -- if the battery < 4 volts aprox
Red_LED.Set; -- Red LED os ON
Green_LED.Clear; -- Green LED is OFF
Orange_LED.Clear; -- Orange LED is OFF
delay until Clock + Milliseconds (2000); -- slow it down to ease reading
elsif Raw >= 3276 then -- If the battery > 5,4 volts aprox
Red_LED.Clear; -- Red LED is OFF
Orange_LED.Set; -- Orange LED is OFF
elsif STM32.User_Button.Has_Been_Pressed then -- If PA0 is ON
Green_LED.Set; -- Green LED is ON
else -- If battery is between: 4 to 5,4 volts aprox
Orange_LED.Set; -- Orange LED is ON
Red_LED.Set; -- Red LED is ON
end if;
(Timing: 2days)
In this test, we are going to use a different program. You can find the program in the Code section. Project repository: "PID Battery Charger With Night Light Control"
How does it work?
a) If we want to take control of a system, the best solution is to make use of the PID control. PID is a control loop feedback mechanism widely used in industrial control systems and a variety of other applications requiring continuously modulated control. A PID controller continuously calculates an error value as the difference between a desired setpoint (SP) and a measured process variable (PV) and applies a correction based on proportional, integral, and derivative terms (denoted P, I, and D respectively), hence the name.
In my case, STM32F507 board generates a PWM signal of 30 kHz, and the control data are: dt = 0.0005, Kp = 0.025 and Ki =0.025. You may notice that the derivative term is very small or null., and the simulation of my PID controller is the following:
https://en.wikipedia.org/wiki/PID_controller
b) The work of deciding when to apply a PWM control signal is left to the STM32F407 board. In my example, this board does the calculations and generating the PWM control signal. With my PICkit2 device, I got the following PWM signals.
c) The voltage divider VR5 delivers an analog value to our port PA1, and this is compared to the "setpoint". The "setpoint" is programmed by code and we did one setpoint test: VBattery = 4.95 volts / VR5 = 2, 2 volts / ADC = 3003 ADC.
declare
Value : Percentage;
Raw1 : Long_Float;
setpoint : constant := 3003.0; -- VR5 = 2.2 volts / Vbat = 4.95 volts
error : Long_Float := 0.0;
output : Long_Float;
integral : Long_Float := 0.0;
dt : constant := 0.0005;
Kp : constant := 0.025;
Ki : constant := 0.025;
d) For example, If the battery is discharged, then the program calculates the error, and generates a PWM signal with a high duty cycle. If the battery is charged, then the program generates a PWM signal with a small duty cycle.
begin
STM32.User_Button.Initialize; -- btn instruction
loop
Start_Conversion (Converter); --adc instruction
Poll_For_Status (Converter, Regular_Channel_Conversion_Complete, Successful); --adc instruction
Raw := UInt32 (Conversion_Value (Converter)); -- reading PA1
Raw1 := Long_Float(Raw * 1);
error := (setpoint - Raw1);
integral := (integral + (error*dt));
output := ((Kp*error) + (Ki*integral));
Value := Percentage (output); -- duty cycle value
if Value < 10 then -- if the duty cycle < 10%
Power_Control.Set_Duty_Cycle (10);
Red_LED.Set; -- Red LED os ON
Green_LED.Clear; -- Green LED is OFF
Orange_LED.Clear; -- Orange LED is OFF
delay until Clock + Milliseconds (500); -- slow it down to ease reading
elsif Value >= 90 then -- If the duty cycle > 90%
Power_Control.Set_Duty_Cycle (90);
Red_LED.Clear; -- Red LED is OFF
Orange_LED.Set; -- Orange LED is OFF
elsif STM32.User_Button.Has_Been_Pressed then -- If PA0 is ON
Green_LED.Set; -- Green LED is ON
else -- If the duty cycle is from: 10 - 90 %
Power_Control.Set_Duty_Cycle (Value); -- PWM signal
Orange_LED.Set; -- Orange LED is ON
Red_LED.Set; -- Red LED is ON
end if;
delay until Clock + Milliseconds (10); -- slow it down to ease reading
end loop;
Now we have an intelligent system that has the advantage of generating many duty cycles, and we will make a more efficient use of energy.
(Timing: 2days)
The schematic circuit was made on CircuitMaker. You can find the repository in the Custom parts and enclosures section.Project repository: "Circuit Board Designs of PID Battery Charger With Night Light Control"
(Timing: 2 days)
Next, I show you some images of the assembly.
(Timing: 1 day)
Generating a control PWM signal from a SineFunction:
This example doesn´t require a setpoint and the PWM signal is generated automatically as we saw in step 6, where only three duties cycles are generated..
Generating a control PWM signal from a PIDController:
Setpoint: VBattery = 4.95 volts / VR5 = 2, 2 volts / ADC = 3003 ADC.
We can appreciate, here the PID controller, generates many duties cycles.
- First of all, my intention is to make projects that are useful, and can serve us to solve real problems. I once asked myself if it was possible to build a smart home battery charger, and with which we make efficient use of energy. The answer is yes, the problem is solved and you don´t have to spend a lot of money.
- Software: In this project I learned to use the "GNAT Programming Studio" software, since I´m used to working with Python, Processing and C ++, and I was well advised by the technical support of AdaCore to understand some fine points of this language programming.
- Hardware: In this project I used different areas of electronics: a) Microcontroller (PWM signals and digital and analog ports); b) Power electronics (Mosfet, battery and lamp); c) Digital electronics (IC Trigger Schmitt); d) Sensors (LDR); and e) Control theory (PID controller).
- Applications: Although the sine function generates three very useful duties cycles, the system went more efficient and practical with the PID controller, since the battery was charged faster and had a longer useful life. The control of night light was used to activate a lamp. This project can serve us as an example in the future to develop a "Street Light Control", with a panel of solar cells or wind energy.










{kind=link}
{kind=link}
Comments