#include <ESP8266WiFi.h>
#include <ESP8266WebServer.h>
const char* ssid = "Lavender";
const char* password = "5335921602";
ESP8266WebServer server(80);
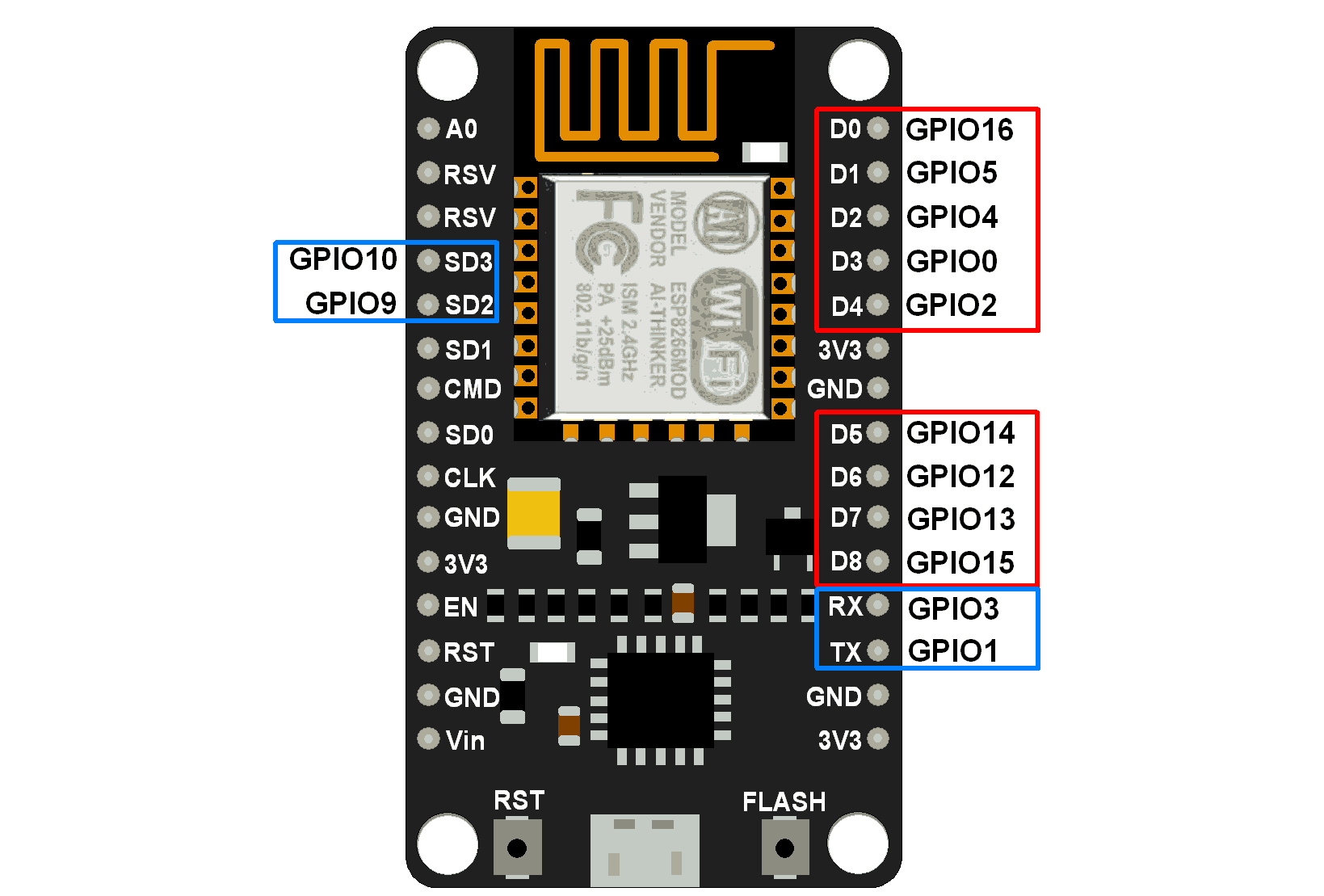
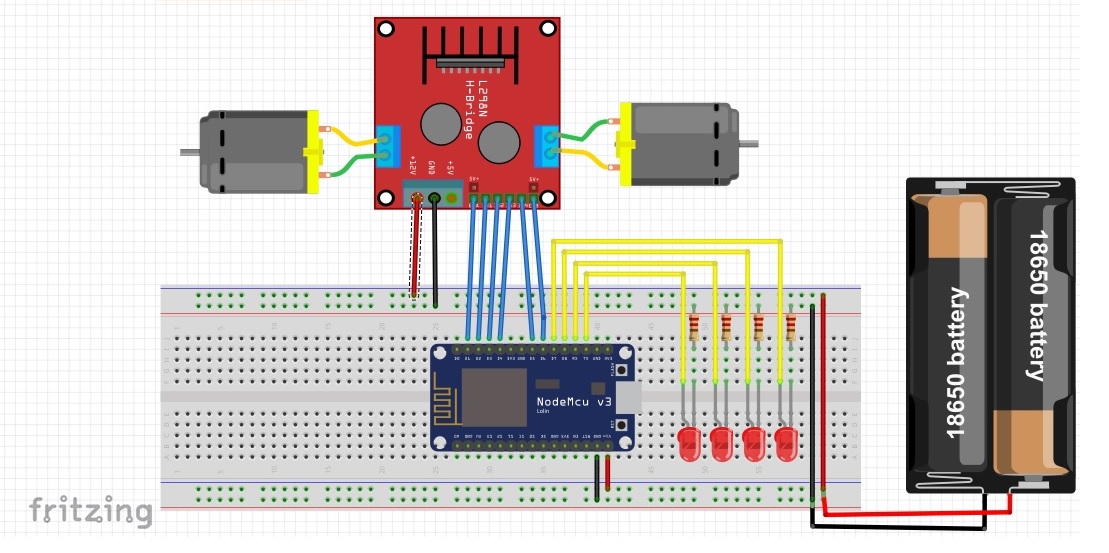
const byte L298N_A_pin = D1; // GPI05
const byte L298N_A_In1_pin = D2; //GPI04
const byte L298N_A_In2_pin = D3; //GPI0
const byte L298N_B_In3_pin = D4; // GPI02
const byte L298N_B_In4_pin = D5; // GPIO14
const byte L298N_B_pin = D6; //GPI12
const byte Led1_pin = D7; //GPIO13 // Sol Sinyal
const byte Led2_pin = D8; //GPIO15 // Sag Sinyal
const byte Led3_pin = D9; //GPIO3 // On Far
const byte Led4_pin = D10; //GPI01 // Arka Lamba
const byte Korna_pin = D0; //GPI016 //Korna
byte SolSinyal = 0;
byte SagSinyal = 0;
byte ArkaLamba = 0;
void motorSpeed(int prmA, byte prmA1, byte prmA2, int prmB, byte prmB1, byte prmB2)
{
analogWrite(L298N_A_pin,prmA);
analogWrite(L298N_B_pin,prmB);
digitalWrite(L298N_A_In1_pin,prmA1);
digitalWrite(L298N_A_In2_pin,prmA2);
digitalWrite(L298N_B_In3_pin,prmB1);
digitalWrite(L298N_B_In4_pin,prmB2);
}
void handleRoot() {
server.send(200, "text/plain", "hello from esp8266!");
}
void handleCar() {
String message = "";
int BtnValue = 0;
for (uint8_t i = 0; i < server.args(); i++) {
if (server.argName(i)=="a")
{
String s = server.arg(i);
BtnValue = s.toInt();
}
Serial.println(server.argName(i) + ": " + server.arg(i) + "\n");
}
switch (BtnValue) {
case 1: // sola donuş
motorSpeed(900,LOW,LOW,1023,HIGH,LOW);
SolSinyal = 1;
digitalWrite(Led1_pin,HIGH);
break;
case 2: // düz ileri
motorSpeed(1023,HIGH,LOW,1023,HIGH,LOW);
SolSinyal = 0;
SagSinyal = 0;
digitalWrite(Led1_pin,LOW);
digitalWrite(Led2_pin,LOW);
break;
case 3:// saga donuş
motorSpeed(1023,HIGH,LOW,900,LOW,LOW);
SagSinyal = 1;
digitalWrite(Led2_pin,HIGH);
break;
case 4:// tam sola donuş
motorSpeed(900,LOW,HIGH,900,HIGH,LOW);
SolSinyal = 1;
digitalWrite(Led1_pin,HIGH);
break;
case 5: // stop
motorSpeed(0,LOW,LOW,0,LOW,LOW);
SolSinyal = 0;
SagSinyal = 0;
digitalWrite(Led1_pin,LOW);
digitalWrite(Led2_pin,LOW);
break;
case 6://
motorSpeed(900,HIGH,LOW,900,LOW,HIGH);
SagSinyal = 1;
digitalWrite(Led2_pin,HIGH);
break;
case 7://sol geri
motorSpeed(900,LOW,LOW,1023,LOW,HIGH);
break;
case 8:// tam geri
motorSpeed(900,LOW,HIGH,900,LOW,HIGH);
break;
case 9:// sag geri
motorSpeed(1023,LOW,HIGH,900,LOW,LOW);
default:
break;
}
if (BtnValue > 7)
{
ArkaLamba = 1;
SolSinyal = 1;
SagSinyal = 1;
digitalWrite(Led1_pin,HIGH);
digitalWrite(Led2_pin,HIGH);
digitalWrite(Led4_pin,HIGH);
}
else
{
ArkaLamba = 0;
digitalWrite(Led4_pin,LOW);
}
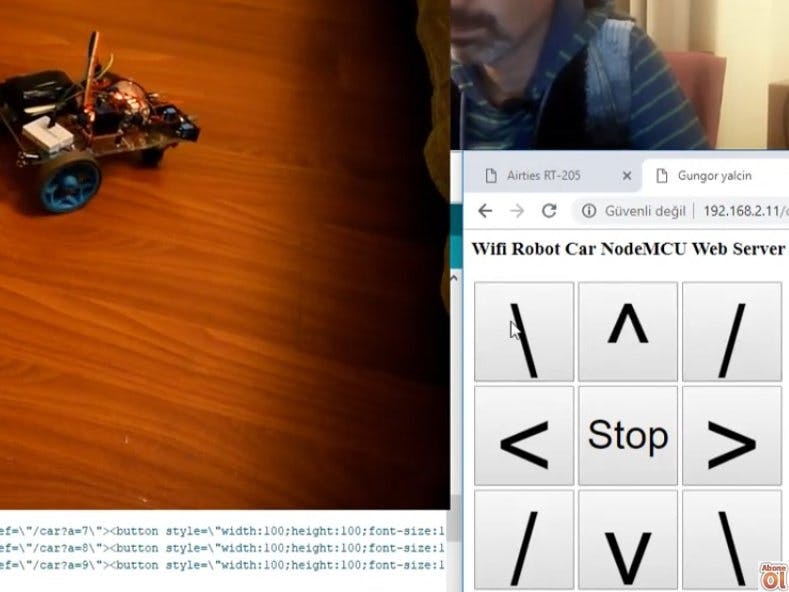
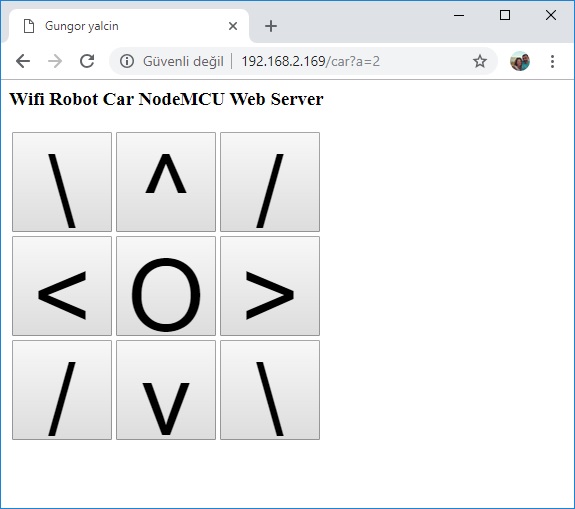
message += "<html> <head> <title>Gungor yalcin</title><head>";
message += "<body><h3>Wifi Robot Car NodeMCU Web Server</h1>";
message += "<table> ";
message += "<tr>";
message += "<td><p><a href=\"/car?a=1\"><button style=\"width:100;height:100;font-size:100px;\" class=\"button\">\\</button></a></p> ";
message += "<td><p><a href=\"/car?a=2\"><button style=\"width:100;height:100;font-size:100px;\" class=\"button\">^</button></a></p> ";
message += "<td><p><a href=\"/car?a=3\"><button style=\"width:100;height:100;font-size:100px;\" class=\"button\">/</button></a></p> ";
message += "<tr>";
message += "<td><p><a href=\"/car?a=4\"><button style=\"width:100;height:100;font-size:100px;\" class=\"button\"> < </button></a></p> ";
message += "<td><p><a href=\"/car?a=5\"><button style=\"width:100;height:100;font-size:40px;\" class=\"button\">Stop</button></a></p> ";
message += "<td><p><a href=\"/car?a=6\"><button style=\"width:100;height:100;font-size:100px;\" class=\"button\"> > </button></a></p> ";
message += "<tr>";
message += "<td><p><a href=\"/car?a=7\"><button style=\"width:100;height:100;font-size:100px;\" class=\"button\">/</button></a></p> ";
message += "<td><p><a href=\"/car?a=8\"><button style=\"width:100;height:100;font-size:100px;\" class=\"button\">v</button></a></p> ";
message += "<td><p><a href=\"/car?a=9\"><button style=\"width:100;height:100;font-size:100px;\" class=\"button\">\\</button></a></p> ";
message += "</table> ";
message += "</body></html>";
server.send(200, "text/html", message);
}
void tempSinyal()
{
if (SolSinyal==1)
digitalWrite(Led1_pin,!digitalRead(Led1_pin));
if (SagSinyal==1)
digitalWrite(Led2_pin,!digitalRead(Led2_pin));
if (ArkaLamba==1)
digitalWrite(Led4_pin,!digitalRead(Led4_pin));
}
void handleNotFound() {
String message = "File Not Found\n\n";
message += "URI: ";
message += server.uri();
message += "\nMethod: ";
message += (server.method() == HTTP_GET) ? "GET" : "POST";
message += "\nArguments: ";
message += server.args();
message += "\n";
for (uint8_t i = 0; i < server.args(); i++) {
message += " " + server.argName(i) + ": " + server.arg(i) + "\n";
}
server.send(404, "text/plain", message);
}
void setup() {
pinMode(L298N_A_In1_pin,OUTPUT);
pinMode(L298N_A_In2_pin,OUTPUT);
pinMode(L298N_B_In3_pin,OUTPUT);
pinMode(L298N_B_In4_pin,OUTPUT);
digitalWrite(L298N_A_In1_pin,LOW);
digitalWrite(L298N_A_In2_pin,LOW);
digitalWrite(L298N_B_In3_pin,LOW);
digitalWrite(L298N_B_In4_pin,LOW);
pinMode(Led1_pin,OUTPUT);
pinMode(Led2_pin,OUTPUT);
pinMode(Led3_pin,OUTPUT);
pinMode(Led4_pin,OUTPUT);
digitalWrite(Led1_pin,LOW);
digitalWrite(Led2_pin,LOW);
digitalWrite(Led3_pin,LOW);
digitalWrite(Led4_pin,LOW);
Serial.begin(115200);
WiFi.mode(WIFI_STA);
WiFi.begin(ssid, password);
Serial.println("");
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.print("Connected to ");
Serial.println(ssid);
Serial.print("IP address: ");
Serial.println(WiFi.localIP());
server.on("/", handleRoot);
server.on("/car", handleCar);
server.on("/inline", []() {
server.send(200, "text/plain", "this works as well");
});
server.onNotFound(handleNotFound);
server.begin();
Serial.println("HTTP server started");
}
void loop() {
server.handleClient();
}















{kind=link}
{kind=link}
{kind=link}
Comments