/*
aux1, aux2 and aux3 will send 2byte number 9200, 9300, 9400 respectively which can be used for additional programs within the main code.
written by: hannu_hell
Special shoutout to youtuber Robojax, How to Mechatronics, Mert Arduino for this code is not purely mine and i have tweaked sections of various codes from the above mentioned authors to suit my project.
What i have written is in no way perfect and i would be happy to accept any modifications. Thanks.
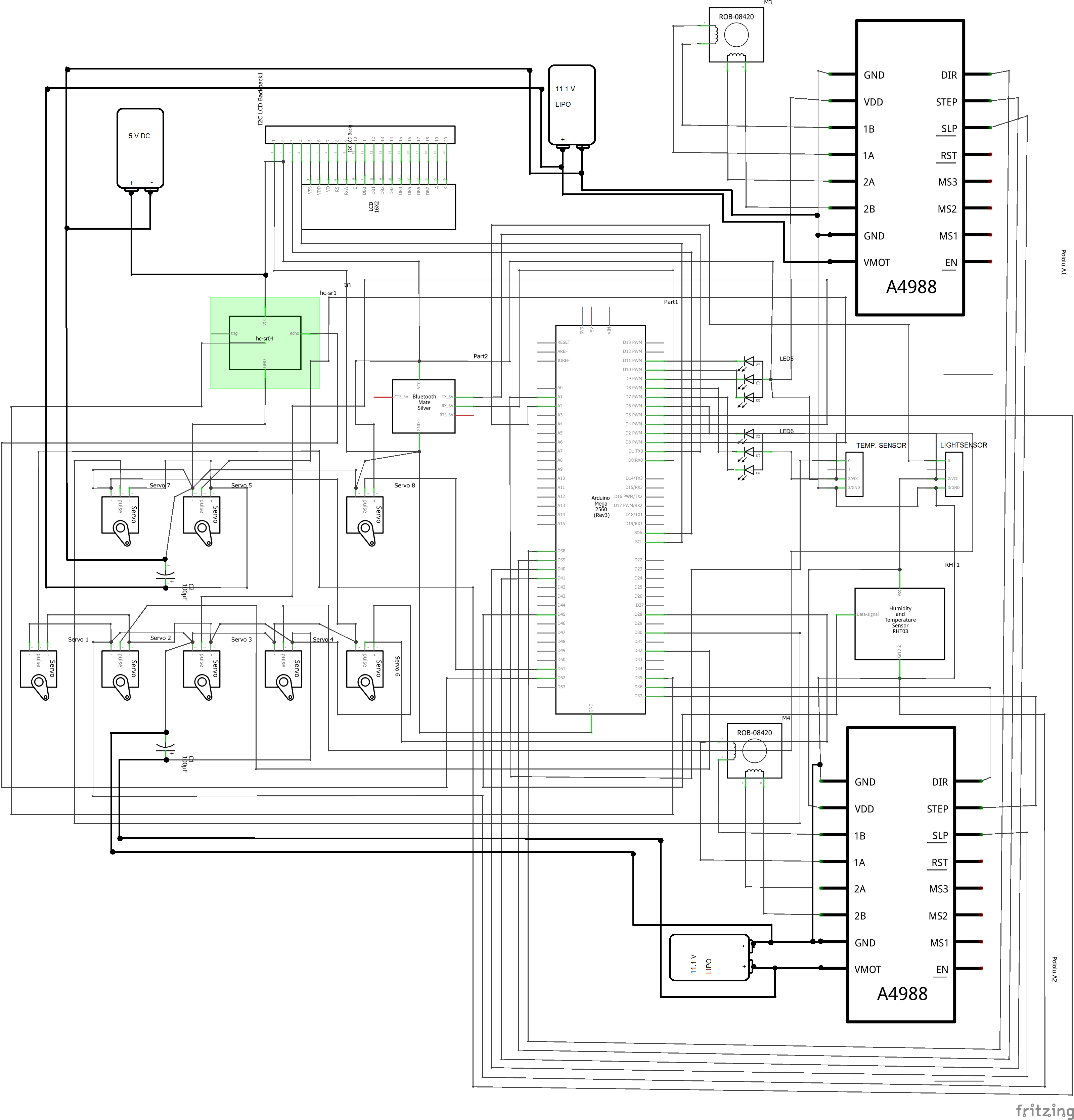
ROGER BOT
Pin No Description
TX Transmit Serial Communication to Bluetooth module
RX Receive Serial Communication to Bluetooth module
2 Signal to Servo 4
3 Signal to Servo 5
4 Signal to Servo 3
5 Signal to Servo 1
6 Roger Head Right LED (Red)
7 Roger Head Right LED (Yellow)
8 Roger Head Right LED (Green)
9 Roger Head Left LED (Green)
10 Roger Head Left LED (Yellow)
11 Roger Head Left LED (Red)
12 RGB and Blue LED
13 Red LED set
A1 LM 35 Temperature Signal
A2 Photocell Signal
A15 Driver Cooling Fan
22 N/A
23 PIR Signal
24 N/A
25 N/A
26 N/A
27 IN 1 Gripper Motor
28 Signal to Servo 6 (Base Rotation Servo)
29 IN 2 Gripper Motor
30 Signal to Servo 7 (Steering Servo)
31 IN 3 Gripper Motor
32 Signal to Servo 2
33 IN 4 Gripper Motor
34 Left Side Drive Motor LED
35 TRIG Sonic Sensor
36 Drive Motor 1 DIR Pin
37 Drive Motor 1 STEP Pin
38 Drive Motor 2 DIR Pin
39 Drive Motor 2 STEP PIN
40 Drive Motor 1 Arm Pin
41 Drive Motor 2 Arm Pin
42 MP3 - Previous Signal
43 Gripper End Stop Switch
44 MP3 - Next Signal
45 DHT11 - Humidity Signal
46 MP3 Play/Pause Signal
47 MP3 Repeat Signal
48 ISD1820 Voice Record
49 ISD1820 Voice Playback
50 Right Side Drive Motor LED
51 Signal to Servo 8 (Head Servo)
52 ECHO Sonic Sensor
53 MP3 Power Signal
SDA LCD Display via IIC
SCL LCD Display via IIC
*/
#include <Servo.h>
#include <LiquidCrystal_I2C.h>
#include <Wire.h>
#include <dht.h>
dht DHT;
#define DHT11_PIN 45
Servo myservo1, myservo2, myservo3, myservo4,myservo5,myservo6,myservo7,myservo8;
LiquidCrystal_I2C lcd(0x3F, 2, 1, 0, 4, 5, 6, 7,3, POSITIVE);
int _step = 0;
const int Pin1 = 27;
const int Pin2 = 29;
const int Pin3 = 31;
const int Pin4 = 33;
const int sleep = 40;
const int sleep2 = 41;
const int stepPin = 37;
const int dirPin = 36;
const int stepPin2 = 39;
const int dirPin2 = 38;
const int redLed = 13;
const int rgbLed = 12;
const int rightsideLed = 50;
const int leftsideLed = 34;
const int rec = 48;
const int playback = 49;
const int head1redLed = 11;
const int head1yellowLed = 10;
const int head1greenLed = 9;
const int head2redLed = 6;
const int head2yellowLed = 7;
const int head2greenLed = 8;
const int trigPin = 35;
const int echoPin = 52;
const int humidity = 45;
const int tempPin = A1;
const int fan = A15;
const int mp3Power = 53;
const int mp3Play = 46;
const int mp3Next = 44;
const int mp3Previous = 42;
const int mp3Repeat = 47;
long duration;
int distanceInch, distanceCm, avedist90, avedist60, avedist120;
boolean dir;// false=clockwise, true=anticlockwise
void setup()
{
lcd.begin(16, 2);
pinMode(Pin1, OUTPUT);
pinMode(Pin2, OUTPUT);
pinMode(Pin3, OUTPUT);
pinMode(Pin4, OUTPUT);
pinMode(50, OUTPUT);
pinMode(34, OUTPUT);
pinMode(12, OUTPUT);
pinMode(13, OUTPUT);
pinMode(48, OUTPUT);
pinMode(49, OUTPUT);
pinMode(A15, OUTPUT);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(tempPin, INPUT);
pinMode(53, OUTPUT);
pinMode(42, OUTPUT);
pinMode(46, OUTPUT);
pinMode(47, OUTPUT);
pinMode(44, OUTPUT);
for (int i = 36; i<42; i++){
pinMode(i, OUTPUT);
}
for (int j = 6; j<12; j++){
pinMode(j, OUTPUT);
delay(5);
digitalWrite(j, LOW);
}
//ON START-UP THREAD---------------------------
lcdmain();
delay(3000);
lcd.clear();
digitalWrite(redLed, LOW);
digitalWrite(rgbLed, LOW);
digitalWrite(rightsideLed, LOW);
digitalWrite(leftsideLed, LOW);
for (int k = 0; k<16; k++){
lcd.setCursor(k, 0);
lcd.print("Arming..");
delay(500);
lcd.clear();
}
myservo1.attach(5);
myservo2.attach(32);
myservo3.attach(4);
myservo4.attach(2);
myservo5.attach(3);
myservo6.attach(28);
myservo7.attach(30);
myservo8.attach(51);
delay(1000);
// armCheck(); This function is for checking if all the arm servos and movements are ok. i have commented it out for now.
lcd.setCursor(5, 0);
lcd.print("Ready for");
lcd.setCursor(5, 1);
lcd.print("Bluetooth");
delay(1000);
lcd.clear();
lcdmain();
delay(100);
Serial.begin(9600);
}
void loop()
{
if(Serial.available()>= 2 )
{
unsigned int servopos = Serial.read();
unsigned int servopos1 = Serial.read();
unsigned int realservo = (servopos1 *256) + servopos;
Serial.println(realservo);
if (realservo >= 1000 && realservo < 1180) {
int servo1 = realservo;
int servo2 = realservo;
servo1 = map(servo1, 1000, 1176, 0, 176);
servo2 = map(servo2, 1000, 1180, 180, 0);
myservo1.write(servo1);
myservo2.write(servo2+5.5);
delay(25);
}
if (realservo >= 2000 && realservo < 2136) {
int servo3 = realservo;
servo3 = map(servo3, 2000, 2136, 20, 145);
myservo3.write(servo3);
delay(15);
}
if (realservo >= 3000 && realservo < 3180) {
int servo4 = realservo;
servo4 = map(servo4, 3000, 3180, 0, 180);
myservo4.write(servo4);
delay(15);
}
if (realservo >= 4000 && realservo < 4180) {
int servo5 = realservo;
servo5 = map(servo5, 4000, 4180, 0, 180);
myservo5.write(servo5);
delay(20);
}
if (realservo >= 5000 && realservo < 5180) {
int servo6 = realservo;
servo6 = map(servo6, 5000, 5180, 0, 180);
myservo6.write(servo6);
delay(15);
}
if (realservo >= 6000 && realservo < 6180) {
int servo7 = realservo;
servo7 = map(servo7, 6000, 6180, 0, 180);
myservo7.write(servo7);
delay(2);
}
if (realservo == 7000) {
grippertightMove(3000, 1.2);
}
if (realservo == 7100) {
gripperlooseMove(3000, 1.2);
}
if (realservo == 7200){
forwardMove(60, 15);
}
if (realservo == 7300){
reverseMove(60, 15);
}
if (realservo == 7400){
clockwiseMove(50, 15);
}
if (realservo == 7500){
anticlockwiseMove(50, 15);
}
if (realservo == 7600){
forwardMove(30, 15);
}
if (realservo == 7700){
reverseMove(30, 15);
}
if (realservo == 7800){
digitalWrite(redLed, HIGH);
digitalWrite(rgbLed, HIGH);
digitalWrite(rightsideLed, HIGH);
digitalWrite(leftsideLed, HIGH);
}
if (realservo == 7900){
digitalWrite(redLed, LOW);
digitalWrite(rgbLed, LOW);
digitalWrite(rightsideLed, LOW);
digitalWrite(leftsideLed, LOW);
}
if (realservo == 8000){
record(8000);
}
if (realservo == 8100){
playBack(8000);
}
if (realservo == 8200){
powerSave();
}
if (realservo == 8300){
analogWrite(fan, 1023);
}
if (realservo == 8400){
SURVEILLANCE(100, 2000);
}
if (realservo == 8500){
SENSORDATA();
}
//if (realservo == 8600){
//WATCHDOG();
//}
//if (realservo == 8700){
//AUX button1
//}
//if (realservo == 8800){
//AUX button2
//}
//if (realservo == 8900){
//AUX button3
//}
if (realservo == 9000){
digitalWrite(mp3Play, HIGH);
delay(250);
digitalWrite(mp3Play, LOW);
delay(10);
}
if (realservo == 9100){
digitalWrite(mp3Next, HIGH);
delay(250);
digitalWrite(mp3Next, LOW);
}
if (realservo == 9200){
digitalWrite(mp3Previous, HIGH);
delay(250);
digitalWrite(mp3Previous, LOW);
}
if (realservo == 9300){
digitalWrite(mp3Repeat, HIGH);
delay(250);
digitalWrite(mp3Repeat, LOW);
}
if (realservo == 9400){
digitalWrite(mp3Power, HIGH);
}
}
}
// DRIVE MOTORS FUNCTIONS DEFINED BELOW--------------------------
void forwardMove(int fwdPace, int fwdpaceDelay){
digitalWrite(sleep, HIGH);
digitalWrite(sleep2, HIGH);
delay(5);
digitalWrite(dirPin, HIGH);
digitalWrite(dirPin2, LOW);
for(int fwd=0; fwd<fwdPace; fwd++){
digitalWrite(stepPin, HIGH);
digitalWrite(stepPin2, HIGH);
delay(fwdpaceDelay);
digitalWrite(stepPin, LOW);
digitalWrite(stepPin2, LOW);
delay(fwdpaceDelay);
}
digitalWrite(sleep, LOW);
digitalWrite(sleep2, LOW);
delay(5);
}
void reverseMove(int rvsPace, int rvspaceDelay){
digitalWrite(sleep, HIGH);
digitalWrite(sleep2, HIGH);
delay(5);
digitalWrite(dirPin, LOW);
digitalWrite(dirPin2, HIGH);
for(int rvs=0; rvs<rvsPace; rvs++){
digitalWrite(stepPin, HIGH);
digitalWrite(stepPin2, HIGH);
delay(rvspaceDelay);
digitalWrite(stepPin, LOW);
digitalWrite(stepPin2, LOW);
delay(rvspaceDelay);
}
digitalWrite(sleep, LOW);
digitalWrite(sleep2, LOW);
delay(5);
}
void clockwiseMove(int clkPace, int clkpaceDelay){
digitalWrite(sleep, HIGH);
digitalWrite(sleep2, HIGH);
delay(5);
digitalWrite(dirPin, HIGH);
digitalWrite(dirPin2, HIGH);
for(int clk=0; clk<clkPace; clk++){
digitalWrite(stepPin, HIGH);
digitalWrite(stepPin2, HIGH);
delay(clkpaceDelay);
digitalWrite(stepPin, LOW);
digitalWrite(stepPin2, LOW);
delay(clkpaceDelay);
}
digitalWrite(sleep, LOW);
digitalWrite(sleep2, LOW);
delay(5);
}
void anticlockwiseMove(int aclkPace, int aclkpaceDelay){
digitalWrite(sleep, HIGH);
digitalWrite(sleep2, HIGH);
delay(5);
digitalWrite(dirPin, LOW);
digitalWrite(dirPin2, LOW);
for(int aclk=0; aclk<aclkPace; aclk++){
digitalWrite(stepPin, HIGH);
digitalWrite(stepPin2, HIGH);
delay(aclkpaceDelay);
digitalWrite(stepPin, LOW);
digitalWrite(stepPin2, LOW);
delay(aclkpaceDelay);
}
digitalWrite(sleep, LOW);
digitalWrite(sleep2, LOW);
delay(5);
}
// GRIPPER MOTOR FUNCTIONS DEFINED-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
void grippertightMove(int grptightPace, int grptightpaceDelay){
for (int grptight=0; grptight<grptightPace; grptight++){
switch(_step){
case 0:
digitalWrite(Pin1, LOW);
digitalWrite(Pin2, LOW);
digitalWrite(Pin3, LOW);
digitalWrite(Pin4, HIGH);
break;
case 1:
digitalWrite(Pin1, LOW);
digitalWrite(Pin2, LOW);
digitalWrite(Pin3, HIGH);
digitalWrite(Pin4, HIGH);
break;
case 2:
digitalWrite(Pin1, LOW);
digitalWrite(Pin2, LOW);
digitalWrite(Pin3, HIGH);
digitalWrite(Pin4, LOW);
break;
case 3:
digitalWrite(Pin1, LOW);
digitalWrite(Pin2, HIGH);
digitalWrite(Pin3, HIGH);
digitalWrite(Pin4, LOW);
break;
case 4:
digitalWrite(Pin1, LOW);
digitalWrite(Pin2, HIGH);
digitalWrite(Pin3, LOW);
digitalWrite(Pin4, LOW);
break;
case 5:
digitalWrite(Pin1, HIGH);
digitalWrite(Pin2, HIGH);
digitalWrite(Pin3, LOW);
digitalWrite(Pin4, LOW);
break;
case 6:
digitalWrite(Pin1, HIGH);
digitalWrite(Pin2, LOW);
digitalWrite(Pin3, LOW);
digitalWrite(Pin4, LOW);
break;
case 7:
digitalWrite(Pin1, HIGH);
digitalWrite(Pin2, LOW);
digitalWrite(Pin3, LOW);
digitalWrite(Pin4, HIGH);
break;
default:
digitalWrite(Pin1, LOW);
digitalWrite(Pin2, LOW);
digitalWrite(Pin3, LOW);
digitalWrite(Pin4, LOW);
break;
}
_step--;
if(_step<0){
_step=7;
}
if(_step>7){
_step=0;
}
delay(grptightpaceDelay);
}
}
void gripperlooseMove(int grploosePace, int grploosepaceDelay){
for(int grploose=0; grploose<grploosePace; grploose++){
switch(_step){
case 0:
digitalWrite(Pin1, LOW);
digitalWrite(Pin2, LOW);
digitalWrite(Pin3, LOW);
digitalWrite(Pin4, HIGH);
break;
case 1:
digitalWrite(Pin1, LOW);
digitalWrite(Pin2, LOW);
digitalWrite(Pin3, HIGH);
digitalWrite(Pin4, HIGH);
break;
case 2:
digitalWrite(Pin1, LOW);
digitalWrite(Pin2, LOW);
digitalWrite(Pin3, HIGH);
digitalWrite(Pin4, LOW);
break;
case 3:
digitalWrite(Pin1, LOW);
digitalWrite(Pin2, HIGH);
digitalWrite(Pin3, HIGH);
digitalWrite(Pin4, LOW);
break;
case 4:
digitalWrite(Pin1, LOW);
digitalWrite(Pin2, HIGH);
digitalWrite(Pin3, LOW);
digitalWrite(Pin4, LOW);
break;
case 5:
digitalWrite(Pin1, HIGH);
digitalWrite(Pin2, HIGH);
digitalWrite(Pin3, LOW);
digitalWrite(Pin4, LOW);
break;
case 6:
digitalWrite(Pin1, HIGH);
digitalWrite(Pin2, LOW);
digitalWrite(Pin3, LOW);
digitalWrite(Pin4, LOW);
break;
case 7:
digitalWrite(Pin1, HIGH);
digitalWrite(Pin2, LOW);
digitalWrite(Pin3, LOW);
digitalWrite(Pin4, HIGH);
break;
default:
digitalWrite(Pin1, LOW);
digitalWrite(Pin2, LOW);
digitalWrite(Pin3, LOW);
digitalWrite(Pin4, LOW);
break;
}
_step++;
if(_step>7){
_step=0;
}
if(_step<0){
_step=7;
}
delay(grploosepaceDelay);
}
}
// SERVO MOTORS' FUNCTIONS DEFINED BELOW--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
void dualservoSetposition(int servoAngle){
int servo1 = servoAngle;
int servo2 = servoAngle;
servo1 = map(servo1, 0, 176, 0, 176);
servo2 = map(servo2, 0, 180, 180, 0);
myservo1.write(servo1);
myservo2.write((servo2)+5.5);
}
void servo3Setposition(int servo3Angle){
int servo3 = servo3Angle;
servo3 = map(servo3, 0, 136, 0, 136);
myservo3.write(servo3);
}
void servo4Setposition(int servo4Angle){
int servo4 = servo4Angle;
servo4 = map(servo4, 0, 180, 0, 180);
myservo4.write(servo4);
}
void servo5Setposition(int servo5Angle){
int servo5 = servo5Angle;
servo5 = map(servo5, 0, 180, 0, 180);
myservo5.write(servo5);
}
void servo6Setposition(int servo6Angle){
int servo6 = servo6Angle;
servo6 = map(servo6, 0, 180, 0, 180);
myservo6.write(servo6);
}
void servo7Setposition(int servo7Angle){
int servo7 = servo7Angle;
servo7 = map(servo7, 0, 180, 0, 180);
myservo7.write(servo7);
}
void servo8Setposition(int servo8Angle){
int servo8 = servo8Angle;
servo8 = map(servo8, 0, 180, 0, 180);
myservo8.write(servo8);
}
void dualservoMove(int dualservoAngle, int dualservodesiredAngle, int dualservostepDelay){
if (dualservodesiredAngle > dualservoAngle){
for (dualservoAngle; dualservoAngle < dualservodesiredAngle; dualservoAngle++){
int servo1 = dualservoAngle;
int servo2 = dualservoAngle;
servo1 = map(servo1, 0, 176, 0, 176);
servo2 = map(servo2, 0, 180, 180, 0);
myservo1.write(servo1);
myservo2.write((servo2)+5.5);
delay(dualservostepDelay);
}
}
if (dualservodesiredAngle < dualservoAngle){
for (dualservoAngle; dualservoAngle > dualservodesiredAngle; dualservoAngle--){
int servo1 = dualservoAngle;
int servo2 = dualservoAngle;
servo1 = map(servo1, 0, 176, 0, 176);
servo2 = map(servo2, 0, 180, 180, 0);
myservo1.write(servo1);
myservo2.write((servo2)+5.5);
delay(dualservostepDelay);
}
}
}
void servo3Move(int servo3Angle, int servo3desiredAngle, int servo3stepDelay){
if (servo3desiredAngle > servo3Angle){
for (servo3Angle; servo3Angle < servo3desiredAngle; servo3Angle++){
int servo3 = servo3Angle;
servo3 = map(servo3, 0, 136, 0, 136);
myservo3.write(servo3);
delay(servo3stepDelay);
}
}
if (servo3desiredAngle < servo3Angle){
for (servo3Angle; servo3Angle > servo3desiredAngle; servo3Angle--){
int servo3 = servo3Angle;
servo3 = map(servo3, 0, 136, 0, 136);
myservo3.write(servo3);
delay(servo3stepDelay);
}
}
}
void servo4Move(int servo4Angle, int servo4desiredAngle, int servo4stepDelay){
if (servo4desiredAngle > servo4Angle){
for (servo4Angle; servo4Angle < servo4desiredAngle; servo4Angle++){
int servo4 = servo4Angle;
servo4 = map(servo4, 0, 136, 0, 136);
myservo4.write(servo4);
delay(servo4stepDelay);
}
}
if (servo4desiredAngle < servo4Angle){
for (servo4Angle; servo4Angle > servo4desiredAngle; servo4Angle--){
int servo4 = servo4Angle;
servo4 = map(servo4, 0, 136, 0, 136);
myservo4.write(servo4);
delay(servo4stepDelay);
}
}
}
void servo5Move(int servo5Angle, int servo5desiredAngle, int servo5stepDelay){
if (servo5desiredAngle > servo5Angle){
for (servo5Angle; servo5Angle < servo5desiredAngle; servo5Angle++){
int servo5 = servo5Angle;
servo5 = map(servo5, 0, 136, 0, 136);
myservo5.write(servo5);
delay(servo5stepDelay);
}
}
if (servo5desiredAngle < servo5Angle){
for (servo5Angle; servo5Angle > servo5desiredAngle; servo5Angle--){
int servo5 = servo5Angle;
servo5 = map(servo5, 0, 136, 0, 136);
myservo5.write(servo5);
delay(servo5stepDelay);
}
}
}
void servo6Move(int servo6Angle, int servo6desiredAngle, int servo6stepDelay){
if (servo6desiredAngle > servo6Angle){
for (servo6Angle; servo6Angle < servo6desiredAngle; servo6Angle++){
int servo6 = servo6Angle;
servo6 = map(servo6, 0, 136, 0, 136);
myservo6.write(servo6);
delay(servo6stepDelay);
}
}
if (servo6desiredAngle < servo6Angle){
for (servo6Angle; servo6Angle > servo6desiredAngle; servo6Angle--){
int servo6 = servo6Angle;
servo6 = map(servo6, 0, 136, 0, 136);
myservo6.write(servo6);
delay(servo6stepDelay);
}
}
}
void servo7Move(int servo7Angle, int servo7desiredAngle, int servo7stepDelay){
if (servo7desiredAngle > servo7Angle){
for (servo7Angle; servo7Angle < servo7desiredAngle; servo7Angle++){
int servo7 = servo7Angle;
servo7 = map(servo7, 0, 136, 0, 136);
myservo7.write(servo7);
delay(servo7stepDelay);
}
}
if (servo7desiredAngle < servo7Angle){
for (servo7Angle; servo7Angle > servo7desiredAngle; servo7Angle--){
int servo7 = servo7Angle;
servo7 = map(servo7, 0, 136, 0, 136);
myservo7.write(servo7);
delay(servo7stepDelay);
}
}
}
void servo8Move(int servo8Angle, int servo8desiredAngle, int servo8stepDelay){
if (servo8desiredAngle > servo8Angle){
for (servo8Angle; servo8Angle < servo8desiredAngle; servo8Angle++){
int servo8 = servo8Angle;
servo8 = map(servo8, 0, 136, 0, 136);
myservo8.write(servo8);
delay(servo8stepDelay);
}
}
if (servo8desiredAngle < servo8Angle){
for (servo8Angle; servo8Angle > servo8desiredAngle; servo8Angle--){
int servo8 = servo8Angle;
servo8 = map(servo8, 0, 136, 0, 136);
myservo8.write(servo8);
delay(servo8stepDelay);
}
}
}
// ISD VOICE RECORD FUNCTIONS DEFINED--------------------------------------------------------------------------------------------------------------------------------------------------------------------------
void record(int recordTime){
digitalWrite(rec, HIGH);
delay(recordTime);
digitalWrite(rec, LOW);
delay(10);
}
void playBack(int playbackTime){
digitalWrite(playback, HIGH);
delay(playbackTime);
digitalWrite(playback, LOW);
delay(10);
}
// MISC FUNCTIONS------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
void powerSave(){
digitalWrite(mp3Power, LOW);
digitalWrite(redLed, LOW);
digitalWrite(rgbLed, LOW);
digitalWrite(rightsideLed, LOW);
digitalWrite(leftsideLed, LOW);
analogWrite(fan, 0);
digitalWrite(head1redLed, LOW);
digitalWrite(head1yellowLed, LOW);
digitalWrite(head1greenLed, LOW);
digitalWrite(head2redLed, LOW);
digitalWrite(head2yellowLed, LOW);
digitalWrite(head2greenLed, LOW);
}
void lcdmain(){
lcd.setCursor(5, 0);
lcd.print("RogerbOt");
lcd.setCursor(5, 1);
lcd.print("inc.");
}
void armCheck(){
lcd.setCursor(5, 0);
lcd.print("Roger Arm");
lcd.setCursor(5, 1);
lcd.print("Check..");
delay(1000);
dualservoSetposition(95);
delay(500);
servo3Setposition(90);
delay(500);
servo4Setposition(90);
delay(500);
servo5Setposition(90);
delay(500);
servo6Setposition(90);
delay(500);
servo6Move(90, 150, 50);
delay(500);
servo6Move(150, 90, 50);
delay(1000);
servo6Move(90, 60, 50);
delay(500);
servo6Move(60, 90, 50);
delay(1000);
dualservoMove(95, 120, 50);
delayMicroseconds(30);
servo3Move(90, 110, 35);
delayMicroseconds(30);
servo4Move(90, 70, 35);
delayMicroseconds(30);
servo5Move(90, 170, 5);
delayMicroseconds(3000);
servo5Move(170, 90, 5);
delayMicroseconds(30);
servo4Move(70, 90, 35);
delayMicroseconds(30);
servo3Move(110, 90, 35);
delayMicroseconds(30);
dualservoMove(120, 95, 50);
delay(1000);
dualservoMove(95, 75, 60);
delay(500);
servo3Move(90, 70, 50);
delay(500);
servo4Move(90, 110, 50);
delay(500);
servo5Move(90, 10, 5);
delay(500);
servo5Move(10, 90, 5);
delay(500);
servo4Move(110, 90, 50);
delay(500);
servo3Move(70, 90, 50);
delay(500);
dualservoMove(75, 95, 60);
delay(1000);
lcd.clear();
lcd.setCursor(5, 0);
lcd.print("Arm Check");
lcd.setCursor(5, 1);
lcd.print("Completed");
delay(1500);
lcd.clear();
}
int surveillance(){
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distanceCm = duration*0.034/2;
distanceInch = duration*0.0133/2;
lcd.setCursor(0,0);
lcd.print("Distance: ");
lcd.print(distanceCm);
lcd.print(" cm");
delay(10);
lcd.setCursor(0,1);
lcd.print("Distance: ");
lcd.print(distanceInch);
lcd.print(" inch");
return distanceCm;
}
int accuracy90(){
lcd.clear();
delay(10);
servo8Setposition(90);
delay(1000);
surveillance();
int dist1 = distanceCm;
delay(1000);
lcd.clear();
surveillance();
int dist2 = distanceCm;
delay(1000);
lcd.clear();
surveillance();
int dist3 = distanceCm;
delay(15);
avedist90 = ((dist1 + dist2 + dist3) / 3);
return avedist90;
}
int accuracy60(){
lcd.clear();
delay(10);
servo8Move(90, 60, 10);
delay(1000);
surveillance();
int dist1 = distanceCm;
delay(1000);
lcd.clear();
surveillance();
int dist2 = distanceCm;
delay(1000);
lcd.clear();
surveillance();
int dist3 = distanceCm;
delay(15);
avedist60 = ((dist1 + dist2 + dist3) / 3);
return avedist60;
}
int accuracy120(){
lcd.clear();
delay(10);
servo8Move(50, 120, 10);
delay(1000);
surveillance();
int dist1 = distanceCm;
delay(1000);
lcd.clear();
surveillance();
int dist2 = distanceCm;
delay(1000);
lcd.clear();
surveillance();
int dist3 = distanceCm;
delay(15);
avedist120 = ((dist1 + dist2 + dist3) / 3);
return avedist120;
}
void SURVEILLANCE(int limitDist, int driveDelay){
while(Serial.available() < 2){
accuracy90();
int AD90 = avedist90;
delay(1000);
accuracy60();
int AD60 = avedist60;
delay(1000);
accuracy120();
int AD120 = avedist120;
delay(1000);
servo8Move(120, 90, 10);
delay(1000);
lcd.clear();
delay(20);
lcdmain();
if ((AD90 < limitDist) && (AD60 < limitDist) && (AD120 < limitDist)){
reverseMove(50, 15);
if(AD120 > AD60){
anticlockwiseMove(90, 15);
delay(driveDelay);
}
if (AD120 < AD60){
clockwiseMove(90, 15);
delay(driveDelay);
}
}
if ((AD90 > limitDist) && (AD60 > limitDist) && (AD120 > limitDist)){
forwardMove(80, 15);
delay(driveDelay);
if(AD120 > AD60){
anticlockwiseMove(90, 15);
delay(driveDelay);
}
if (AD120 < AD60){
clockwiseMove(90, 15);
delay(driveDelay);
}
}
if ((AD90 < limitDist) && (AD120 < limitDist) && (AD60 > limitDist)){
clockwiseMove(90, 15);
delay(driveDelay);
forwardMove(50, 15);
delay(driveDelay);
}
if ((AD60 < limitDist) && (AD120 < limitDist) && (AD90 > limitDist)){
forwardMove(50, 15);
if (AD120 < AD60){
clockwiseMove(90, 15);
...
This file has been truncated, please download it to see its full contents.



_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)

























_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments