//---------------------------------------------------------------------------------
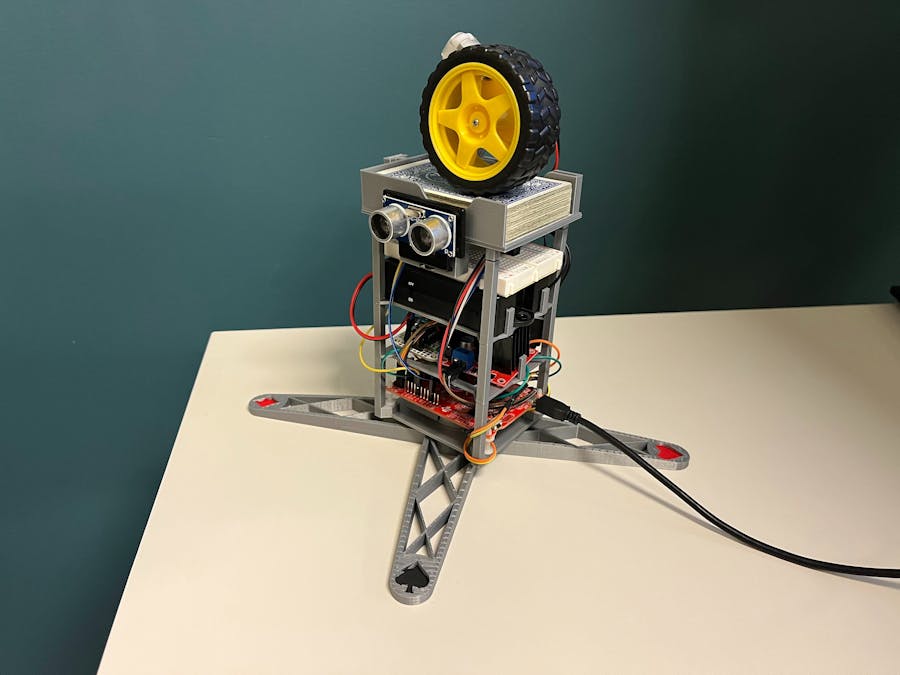
// Final Code – Card Dealing Machine
//---------------------------------------------------------------------------------
#include <msp430g2553.h>
// Definitions to Improve Code Readability
#define L1 BIT1
#define L2 BIT2
#define L3 BIT4
#define L4 BIT5
#define delay 10000
#define Button BIT3
#define ECHO BIT6
#define MOTOR BIT7
#define GreenLED BIT0
#define Player_Distance 4
#define TRUE 1
#define FALSE 0
volatile int pulse_time[2]; // Used to store time between sensor rising
// and falling edge
volatile float time; // Used to store ultrasonic sensor time
volatile float distance; // Used to store distance to object
volatile unsigned int i=0; // Used in a for loop
int position = 0; // Used to keep track of stepper position
void Spin_Twelfth (); // Spins the stepper motor 30 degrees
void Flick_Card (); // Briefly spins the DC motor
int Player_Detected (float dst); // Returns true if a player is detected
void main(void)
{
WDTCTL = WDTPW + WDTHOLD; // Stop watchdog timer
P1DIR |= L1 + L2 + L3 + L4; // Configure P1.0,1,2,4 as Output
P2DIR |= MOTOR; // Configure P2.6 as Output for DC motor
P2OUT &= ~MOTOR; // Turn DC motor off initially
P1REN = Button; // Enable pull-up resistor
P1OUT = Button; // Sets button initially unpressed
P1IE = Button; // Enable button interrupt
BCSCTL1= CALBC1_1MHZ; // Setting Clock frequency to 1 MHz
DCOCTL = CALDCO_1MHZ; // Setting Clock frequency to 1 MHz
P1DIR = ECHO; // P1.6 set as output
P2SEL = BIT1; // P2.1 Set as timer
P1SEL = ECHO; // Ultrasonic echo pin set as timer
P1DIR |= GreenLED; // Configure Green LED pin as output
TA0CTL = TASSEL_2|MC_1 ; // SMclock selected, up mode, compare mode
TA0CCR0 = 0xFFFF; // Used for period of sensor (65.535 ms)
TA0CCR1 = 0x000A; // Used to send 0.01 ms trigger pulse
TA0CCTL1 = OUTMOD_7; // Used for PWM
TA1CTL = TASSEL_2|MC_2 ; // SMclock, continuous mode
TA1CCTL1 = CAP | CCIE | CCIS_0 | CM_3 | SCS ; // Capture mode, interrupts
// enabled, capture compare
__enable_interrupt();
while (1) // Loop forever
{
distance = time/148; // Dividing by 148 converts into seconds
Player_Detected(distance); // Run player detection function
if (Player_Detected(distance)) // If a player is detected
{
Flick_Card(); // Flicks a card when a player is found
}
}
}
void Spin_Twelfth () // Spins the stepper motor 30 degrees
{ // Motor is driven in half step mode
P1OUT |= L1; // Set Line 1 High
P1OUT &= ~L2; // Set Line 2 Low
P1OUT &= ~L3; // Set Line 3 Low
P1OUT &= ~L4; // Set Line 4 Low
__delay_cycles(delay); // Delay for 10 ms
P1OUT |= L1; // Set Line 1 High
P1OUT |= L2; // Set Line 2 High
P1OUT &= ~L3; // Set Line 3 Low
P1OUT &= ~L4; // Set Line 4 Low
__delay_cycles(delay); // Delay for 10 ms
P1OUT &= ~L1; // Set Line 1 Low
P1OUT |= L2; // Set Line 2 High
P1OUT &= ~L3; // Set Line 3 Low
P1OUT &= ~L4; // Set Line 4 Low
__delay_cycles(delay); // Delay for 10 ms
P1OUT &= ~L1; // Set Line 1 Low
P1OUT |= L2; // Set Line 2 High
P1OUT |= L3; // Set Line 3 High
P1OUT &= ~L4; // Set Line 4 Low
__delay_cycles(delay); // Delay for 10 ms
P1OUT &= ~L1; // Set Line 1 Low
P1OUT &= ~L2; // Set Line 2 Low
P1OUT |= L3; // Set Line 3 High
P1OUT &= ~L4; // Set Line 4 Low
__delay_cycles(delay); // Delay for 10 ms
P1OUT &= ~L1; // Set Line 1 Low
P1OUT &= ~L2; // Set Line 2 Low
P1OUT |= L3; // Set Line 3 High
P1OUT |= L4; // Set Line 4 High
__delay_cycles(delay); // Delay for 10 ms
P1OUT &= ~L1; // Set Line 1 Low
P1OUT &= ~L2; // Set Line 2 Low
P1OUT &= ~L3; // Set Line 3 Low
P1OUT |= L4; // Set Line 4 High
__delay_cycles(delay); // Delay for 10 ms
P1OUT |= L1; // Set Line 1 High
P1OUT &= ~L2; // Set Line 2 Low
P1OUT &= ~L3; // Set Line 3 Low
P1OUT |= L4; // Set Line 4 High
__delay_cycles(delay); // Delay for 10 ms
}
#pragma vector=PORT1_VECTOR // Button interrupt, spins stepper motor
__interrupt void Button_Interrupt(void)
{
Spin_Twelfth(); // Spin stepper 30 degrees
P1IFG = ~Button; // Clear interrupt flag for next time
}
void Flick_Card () // Spins the DC motor to deal one card
{
int flick_duration; // Length motor is driven
for (flick_duration = 10; flick_duration > 0; flick_duration--)
{
P2OUT |= MOTOR; // Turns on the motor
__delay_cycles(12500); // Delay for 12.5 ms
P2OUT &= ~MOTOR; // Turns off the motor
__delay_cycles(500); // Delay for 0.5 ms
}
__delay_cycles(250000); // Delay to avoid dealing multiple cards
// for one wave
}
#pragma vector = TIMER1_A1_VECTOR // Finds time of signal which is used to
// find distance
__interrupt void Timer_A_Ultrasonic_Sensor(void)
{
pulse_time[i] = TA1CCR1; // Stores rising edge time
i += 1;
TA1CCTL1 &= ~CCIFG ; // Clear interrupt flag
if (i==2) // On second interrupt (falling edge)
{
time=pulse_time[i-1]-pulse_time[i-2]; // Find time between interrupts
i=0; // Set to 0 for next repetition
}
}
int Player_Detected (float dst) // Returns TRUE if player detected within
// acceptable range
{
if (dst <= Player_Distance) // If object detected within given range
{
P1OUT |= GreenLED; // Used for debugging, turn on GreenLED
return TRUE; // Return true if player is detected
}
else // If object is not within acceptable range
{
P1OUT &= ~GreenLED; // Used for debugging, turn off GreenLED
return FALSE; // Return false if no player is detected
}
}
//---------------------------------------------------------------------------------














_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)

Comments
Please log in or sign up to comment.