


Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 5 | ||||
_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 2 | ||||
| × | 1 | ||||
 |
| × | 3 | |||
Software apps and online services | ||||||
| ||||||
 |
| |||||
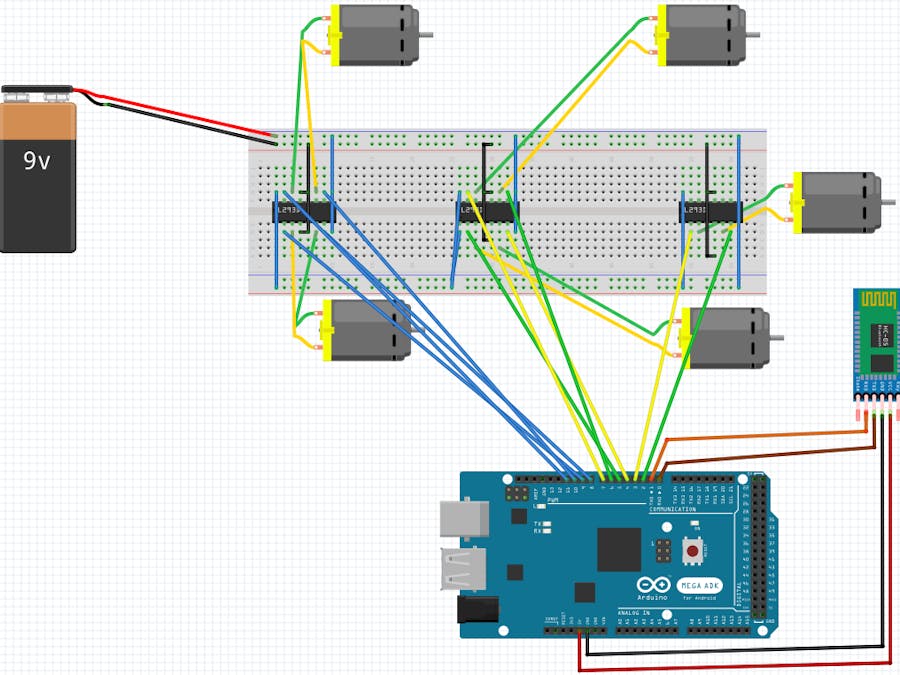
Operating robotic arm with wireless Bluetooth connection from Android app.
Connections:Connect:
- pin 2,3 to wheel left motor
- pin 4,5 to wheel right motor
- pin 6,7 to gripper hand motor for holding and dropping
- pin 8,9 to joint 2 motor
- pin 10,11, to joint 3 motor
- Pin 12,13 to joint 4 motor
- Pin 14,15 to joint 5 motor
- HC-05 rx to tx of Arduino
- HC-05 tx to rx of Arduino
- HC-05 vcc to 5v of Arduino
- HC-05 gnd to gnd of Arduino
Please send your project images and videos to us which you made using this app and code to ksjones777@gmail.com or whatsapp to +919030266397 to make us happy.
GOD BLESS YOU
1 / 3
ROBOTIC ARM CONNECTIONS IN COMMENT BOX PLEASE CHECK THAT
USE CASTOR WHEEL& L293D
PIN 2,3 TO WHEEL LEFT MOTOR
PIN 4,5 TO WHEEL RIGHT MOTOR
PIN 6,7 TO GRIPPER HAND MOTOR FOR HOLDING AND DROPPING
PIN 8,9 TO JOINT 2 MOTOR
PIN 10,11, TO JOINT 3 MOTOR
PIN 12,13 TO JOINT 4 MOTOR
PIN 14,15 TO JOINT 5 MOTOR
HC-05 RX TO TX OF ARDUINO
HC-05 TX TO RX OF ARDUINO
HC-05 VCC TO 5V OF ARDUINO
HC-05 GND TO GND OF ARDUINO
Please send your project images and videos to us which you made using this app and code to ksjones777@gmail.com or whatsapp to +919030266397 to make us happy.
PIN 2,3 TO WHEEL LEFT MOTOR
PIN 4,5 TO WHEEL RIGHT MOTOR
PIN 6,7 TO GRIPPER HAND MOTOR FOR HOLDING AND DROPPING
PIN 8,9 TO JOINT 2 MOTOR
PIN 10,11, TO JOINT 3 MOTOR
PIN 12,13 TO JOINT 4 MOTOR
PIN 14,15 TO JOINT 5 MOTOR
HC-05 RX TO TX OF ARDUINO
HC-05 TX TO RX OF ARDUINO
HC-05 VCC TO 5V OF ARDUINO
HC-05 GND TO GND OF ARDUINO
Please send your project images and videos to us which you made using this app and code to ksjones777@gmail.com or whatsapp to +919030266397 to make us happy.




{kind=link}
Comments
Please log in or sign up to comment.