

Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
 |
| |||||
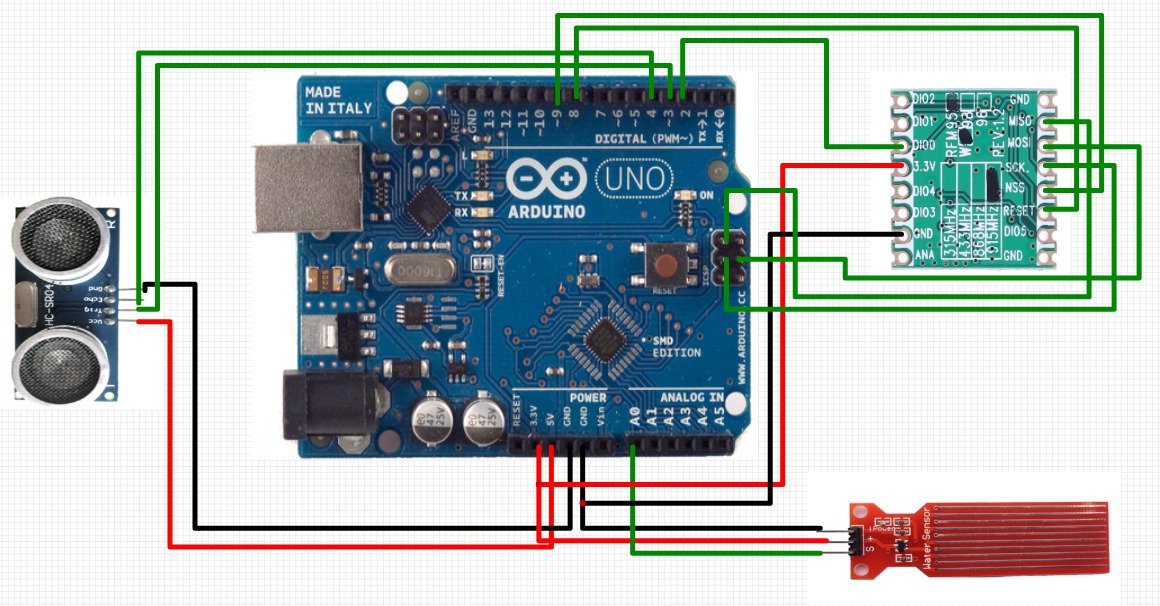
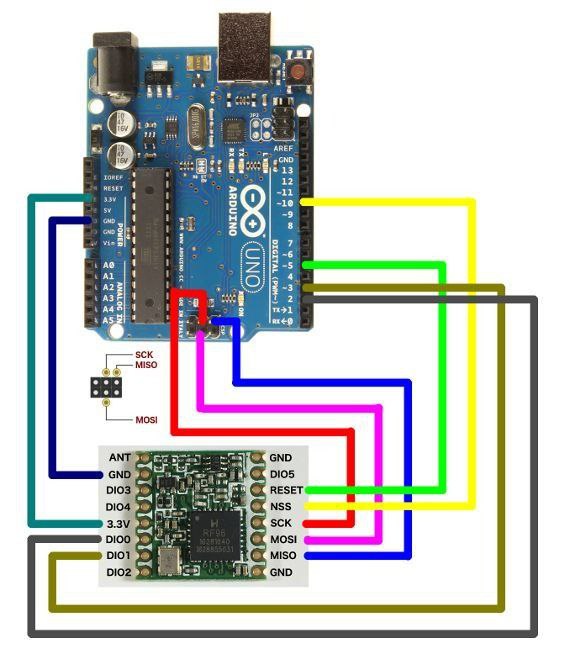
We want to be able to create our own lora-gateway! We want to understand systems, capabilities and possibilities. People have built it, but detailed information is hard to find. That's why we created this project. It's a work in progress, we're working on it right now.
{kind=link}
{kind=link}

Comments