// Make sure these two variables are correct for your setup
int scale = 200; //200 (±200g) for ADXL377
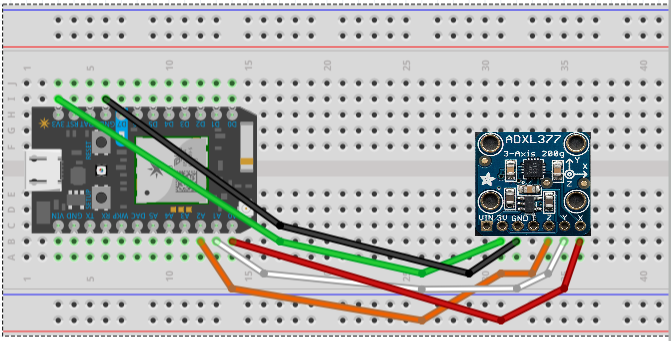
boolean micro_is_5V = false; // Set to true if using a 5V microcontroller such as the Arduino Uno, false if using a 3.3V microcontroller, this affects the interpretation of the sensor data
float magnitude = 0; // defined variables
float xtermb,xterma;
float ytermb,yterma;
float ztermb,zterma;
float magxyzb,magxyza;
float magdiff,actualmagdiff;
#include "math.h" // to use special math functions
void setup()
{
// Initialize serial communication at 115200 baud
Serial.begin(115200);
}
// Read, scale, and print accelerometer data
void loop()
{
// Get raw accelerometer data for each axis
int rawXb = analogRead(A0);
int rawYb = analogRead(A1);
int rawZb = analogRead(A2);
// Scale accelerometer ADC readings into common units
// Scale map depends on if using a 5V or 3.3V microcontroller
float scaledXb, scaledYb, scaledZb,scaledmagnitudeb; // Scaled values for each axis
delay(1);// Allows a reference data tobe obtained
// Get raw accelerometer data for each axis after delay to compare data
int rawXa = analogRead(A0);
int rawYa = analogRead(A1);
int rawZa = analogRead(A2);
// Scale accelerometer ADC readings into common units
// Scale map depends on if using a 5V or 3.3V microcontroller
float scaledXa, scaledYa, scaledZa,scaledmagnitudea; // Scaled values for each axis
if (micro_is_5V) // Microcontroller runs off 5V
{
scaledXb = mapf(rawXb, 0, 675, -scale, scale); // 3.3/5 * 1023 =~ 675
scaledYb = mapf(rawYb, 0, 675, -scale, scale);
scaledZb = mapf(rawZb, 0, 675, -scale, scale);
}
else // Microcontroller runs off 3.3V (For this particular experiment)
{
scaledXb = mapf(rawXb, 0, 4095, -scale, scale); // Before Hit Comparsion Data
scaledYb = mapf(rawYb, 0, 4095, -scale, scale);
scaledZb = mapf(rawZb, 0, 4095, -scale, scale);
// This is to find magnitude Before Hit
xtermb= (scaledXb*scaledXb);
ytermb= (scaledYb*scaledYb);
ztermb= (scaledZb*scaledZb);
magxyzb= (xtermb+ytermb+ztermb);
scaledmagnitudeb= sqrt(magxyzb);
scaledXa = mapf(rawXa, 0, 4095, -scale, scale); // After Hit Comparsion Data
scaledYa = mapf(rawYa, 0, 4095, -scale, scale);
scaledZa = mapf(rawZa, 0, 4095, -scale, scale);
// This is to find magnitude After Hit
xterma= (scaledXa*scaledXa);
yterma= (scaledYa*scaledYa);
zterma= (scaledZa*scaledZa);
magxyza= (xterma+yterma+zterma);
scaledmagnitudea= sqrt(magxyza);
}
// Print out scaled X,Y,Z accelerometer readings Before Hit
Serial.print("X Vector Before: "); Serial.print(scaledXb); Serial.println(" g");
Serial.print("Y Vector Before: "); Serial.print(scaledYb); Serial.println(" g");
Serial.print("Z Vector Before: "); Serial.print(scaledZb); Serial.println(" g");
Serial.println("*****************************");
Serial.print("Magnitude Before: "); Serial.print(scaledmagnitudeb); Serial.println(" g"); // Calculate Before Magnitude
Serial.println("*****************************");
Serial.println("*****************************");
// Print out scaled X,Y,Z accelerometer readings After Hit
Serial.print("X Vector After: "); Serial.print(scaledXa); Serial.println(" g");
Serial.print("Y Vector After: "); Serial.print(scaledYa); Serial.println(" g");
Serial.print("Z Vector After: "); Serial.print(scaledZa); Serial.println(" g");
Serial.println("*****************************");
Serial.print("Magnitude After: "); Serial.print(scaledmagnitudea); Serial.println(" g"); // Calculated After Magnitude
Serial.println("*****************************");
Serial.println("*****************************");
magdiff=(scaledmagnitudeb-scaledmagnitudea); // This takes difference in two readings
actualmagdiff=abs(magdiff);
if ( magdiff < 0 ) // Loop gives absolute of reading, this is final magnitude
{
actualmagdiff = -magdiff;
}
else
{
actualmagdiff = magdiff;
}
// Prints out Final or Actual Mantiude difference
Serial.print("Actual Magnitude: "); Serial.print(actualmagdiff,5 ); Serial.println(" g");//calculated magnitude
Serial.println("*****************************");
Serial.println("*****************************");
if ( actualmagdiff > 98 ) // This sets G-Force Threshold to compare and publish
{
Particle.publish("516Shoemake318", String(actualmagdiff)); // Publishes data
delay(1000); // Delays to prevent crash
}
else
{
actualmagdiff = actualmagdiff; // Just a way to end loop
}
delay(3); // Minimum delay before comparsion loop starts over
}
// Same functionality as Arduino's standard map function, except using floats
float mapf(float x, float in_min, float in_max, float out_min, float out_max)
{
return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min;
}












{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.