


Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
Essentially, the main idea was to use the protocol MQTT and IoT, and also Cortana, to make an integration to have a complete system that controls something. So, it's not necessary to control a servo Motor. We control everything with this project, but I took the servo motor as an example. Just to add something from Physics and to make some calculations to pick the right motor is useful for me, to open my room door through the voice command. I also wanted to try a new technology like PHPoc. This was a good motivation for me. This board has a lot of features that can be useful in our daily life. PHP is a programming language making this board an advantage, because it is easy to learn and program.
It consist from two parts: hardware and software.
HardwareThe plastic module to adapt the motor with the knob of the door can easily be made with tools available everywhere.
I did this in 3D module just to make it more clear. As I mentioned before, that isn't necessary to control the door knob, but it makes this project realistic.
To choose the servo motor we need to measure the torque, because without this knowledge we are not able to rotate the knob of the door. The formula is:
Also this is the source of this formula. I measured this and found that the torque force is 250 inch-pounds-force. Next I searched in the internet to find the right motor.
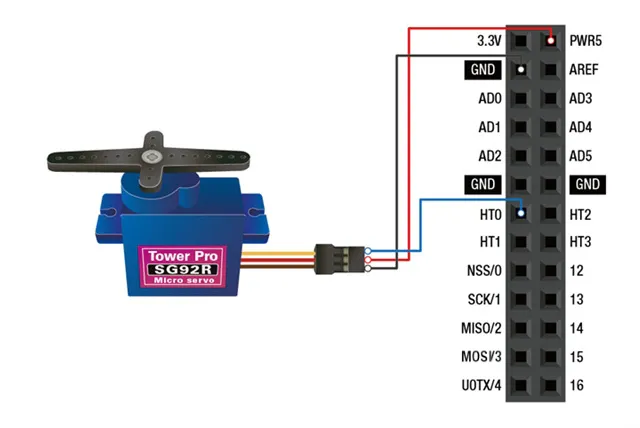
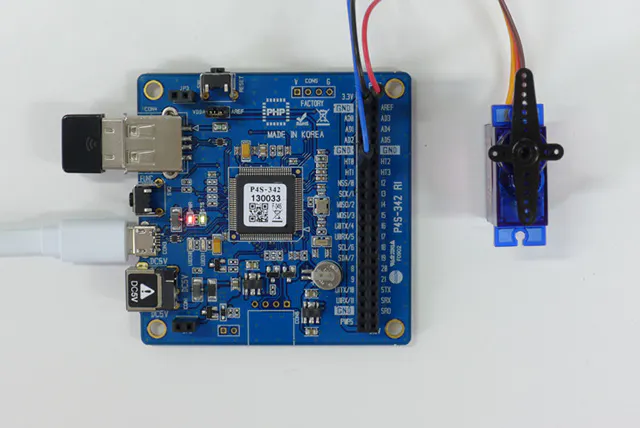
Software PartFirstly, for Cortana Part, I used some open source project in Github and this is the link. Secondly, connecting the motor as shown in the schematics.
ResultsNow the video for the results:







{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.