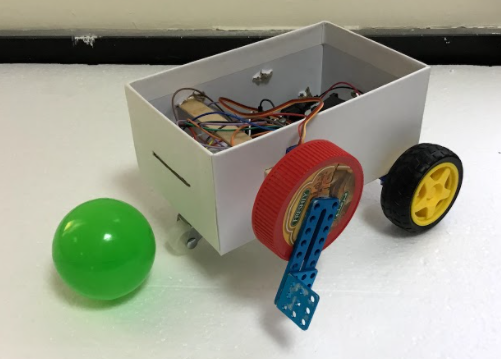
"Golfie" is a golfer robot that is manually controlled by an IR remote control. The basic idea behind this project was to transform the golf competition into robots. The robot can move forward, right and left. When it approaches the ball, the arm can swing in a bidirectional manner. The arm swing backwards to trigger itself preparing to take the shot and then it swings quickly to shoot the ball into the hole (just as pro golfers take their shots).
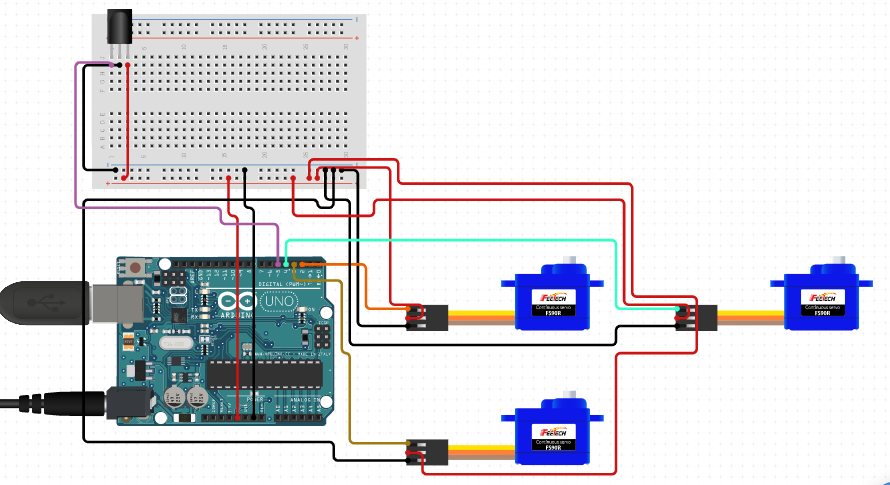
The robot movement is controlled by 3 servo motors:
- 1 left servo attached to the left wheel (This servo is modified into a 360 degrees continuous motion mode).
- 1 right servo attached to the right wheel (This servo is modified into a 360 degrees continuous motion mode).
- 1 servo controlling the arm swing (This servo is kept on 180 degrees motion mode)
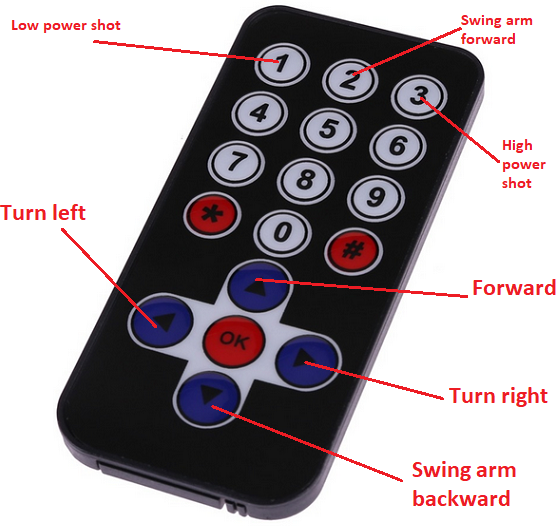
The robot is controlled by an IR remote control. The user must control the robot to put the ball in the hole in a short period of time.




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)



{kind=link}
{kind=link}
{kind=link}

Comments
Please log in or sign up to comment.