


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
 |
| |||||
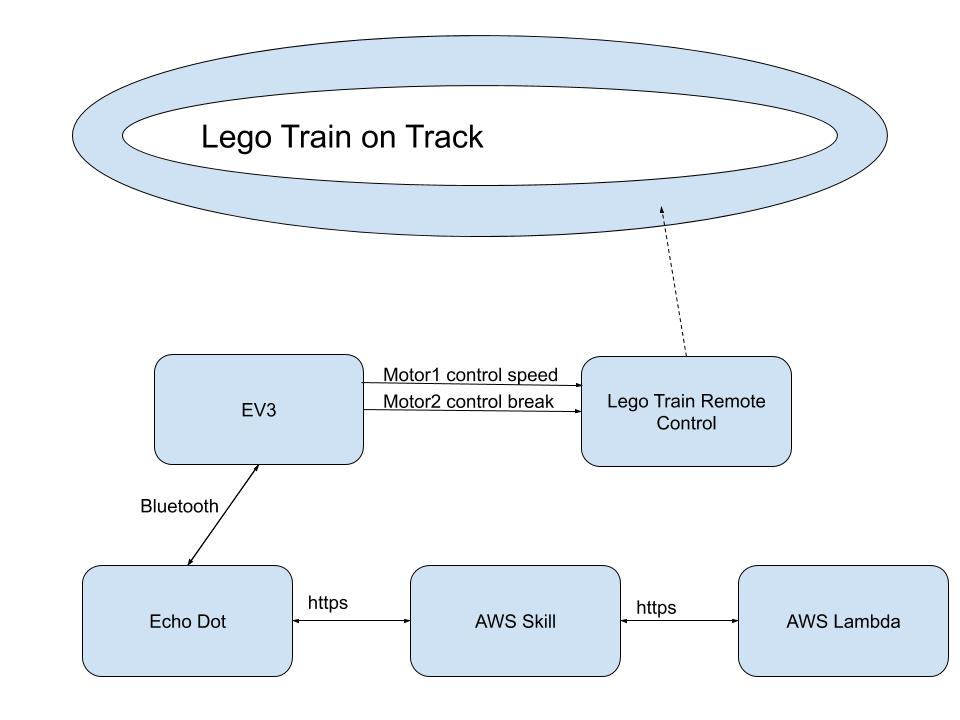
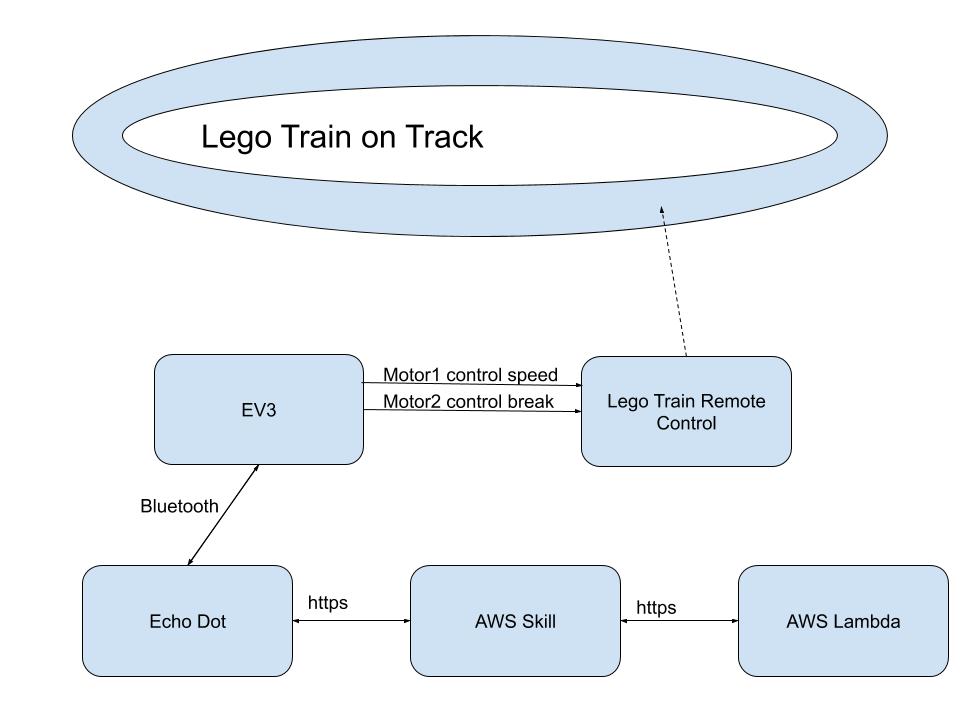
The LEGO Train was meant to be played with using a remote control, which was pretty fun at first, but not very fun after. We stopped using it, and didn't really use it that much ever again. But when we saw the EV3/Alexa challenge, we thought for a long time for ideas, but suddenly, someone came up with the idea of voice controlling the train, and we decided to do it. On the controller, we put some pieces, and added motors to turn the knobs to control the speed of the train, and motors to press the stop button. Then, we put an EV3 beside it, connected the motors, and finally started making a chatbot on Alexa and then connected it to the EV3. We controlled the train with "Start the train", "Stop the train", "Speed up the train", and "Slow down the train".
{kind=link}
#!/usr/bin/env python3
import os
import sys
import time
import logging
import json
import random
import threading
from enum import Enum
from agt import AlexaGadget
from ev3dev2.led import Leds
from ev3dev2.sound import Sound
from ev3dev2.motor import OUTPUT_A, OUTPUT_B, SpeedPercent, MediumMotor
# Set the logging level to INFO to see messages from AlexaGadget
logging.basicConfig(level=logging.INFO, stream=sys.stdout, format='%(message)s')
logging.getLogger().addHandler(logging.StreamHandler(sys.stderr))
logger = logging.getLogger(__name__)
class Command(Enum):
"""
The list of preset commands and their invocation variation.
These variations correspond to the skill slot values.
"""
FASTER = ['faster','fast','speed up','start']
SLOWER = ['slower','slow','slow down']
BRAKE = ['brake','stop']
class MindstormsGadget(AlexaGadget):
"""
A Mindstorms gadget that performs movement based on voice commands.
Two types of commands are supported.
"""
def __init__(self):
"""
Performs Alexa Gadget initialization routines and ev3dev resource allocation.
"""
super().__init__()
# Gadget state
self.patrol_mode = False
# Ev3dev initialization
self.leds = Leds()
self.sound = Sound()
self.speedDrive = MediumMotor(OUTPUT_A)
self.breekDrive = MediumMotor(OUTPUT_B)
def on_connected(self, device_addr):
"""
Gadget connected to the paired Echo device.
:param device_addr: the address of the device we connected to
"""
self.leds.set_color("LEFT", "GREEN")
self.leds.set_color("RIGHT", "GREEN")
logger.info("{} connected to Echo device".format(self.friendly_name))
def on_disconnected(self, device_addr):
"""
Gadget disconnected from the paired Echo device.
:param device_addr: the address of the device we disconnected from
"""
self.leds.set_color("LEFT", "BLACK")
self.leds.set_color("RIGHT", "BLACK")
logger.info("{} disconnected from Echo device".format(self.friendly_name))
def on_custom_mindstorms_gadget_control(self, directive):
"""
Handles the Custom.Mindstorms.Gadget control directive.
:param directive: the custom directive with the matching namespace and name
"""
try:
payload = json.loads(directive.payload.decode("utf-8"))
print("Control payload: {}".format(payload), file=sys.stderr)
control_type = payload["type"]
if control_type == "move":
# Expected params: [direction]
self._move(payload["direction"], int(payload["duration"]), int(payload["speed"]))
except KeyError:
print("Missing expected parameters: {}".format(directive), file=sys.stderr)
def _move(self, direction, duration: int, speed: int, is_blocking=False):
"""
Handles move commands from the directive.
Right and left movement can under or over turn depending on the surface type.
:param direction: the move direction
:param duration: the duration in seconds
:param speed: the speed percentage as an integer
:param is_blocking: if set, motor run until duration expired before accepting another command
"""
if direction in Command.FASTER.value:
print("Move command: ({})".format(direction), file=sys.stderr)
self.speedDrive.on_for_rotations(SpeedPercent(20), 0.05)
if direction in Command.SLOWER.value:
print("Move command: ({})".format(direction), file=sys.stderr)
self.speedDrive.on_for_rotations(SpeedPercent(-20), 0.05)
if direction in Command.BRAKE.value:
print("Move command: ({})".format(direction), file=sys.stderr)
self.breekDrive.on_for_rotations(SpeedPercent(30), 0.3)
self.breekDrive.on_for_rotations(SpeedPercent(-30), 0.3)
if __name__ == '__main__':
gadget = MindstormsGadget()
# Set LCD font and turn off blinking LEDs
os.system('setfont Lat7-Terminus12x6')
gadget.leds.set_color("LEFT", "BLACK")
gadget.leds.set_color("RIGHT", "BLACK")
# Startup sequence
gadget.sound.play_song((('C4', 'e'), ('D4', 'e'), ('E5', 'q')))
gadget.leds.set_color("LEFT", "GREEN")
gadget.leds.set_color("RIGHT", "GREEN")
# Gadget main entry point
gadget.main()
# Shutdown sequence
gadget.sound.play_song((('E5', 'e'), ('C4', 'e')))
gadget.leds.set_color("LEFT", "BLACK")
gadget.leds.set_color("RIGHT", "BLACK")
const Alexa = require('ask-sdk-core');
const Util = require('./util');
const Common = require('./common');
// The namespace of the custom directive to be sent by this skill
const NAMESPACE = 'Custom.Mindstorms.Gadget';
// The name of the custom directive to be sent this skill
const NAME_CONTROL = 'control';
const LaunchRequestHandler = {
canHandle(handlerInput) {
return Alexa.getRequestType(handlerInput.requestEnvelope) === 'LaunchRequest';
},
handle: async function(handlerInput) {
let request = handlerInput.requestEnvelope;
let { apiEndpoint, apiAccessToken } = request.context.System;
let apiResponse = await Util.getConnectedEndpoints(apiEndpoint, apiAccessToken);
if ((apiResponse.endpoints || []).length === 0) {
return handlerInput.responseBuilder
.speak(`I couldn't find an EV3 Brick connected to this Echo device. Please check to make sure your EV3 Brick is connected, and try again.`)
.getResponse();
}
// Store the gadget endpointId to be used in this skill session
let endpointId = apiResponse.endpoints[0].endpointId || [];
Util.putSessionAttribute(handlerInput, 'endpointId', endpointId);
return handlerInput.responseBuilder
.speak("Welcome, you can start issuing move commands")
.reprompt("Awaiting commands")
.getResponse();
}
};
// Add the speed value to the session attribute.
// This allows other intent handler to use the specified speed value
// without asking the user for input.
const SetSpeedIntentHandler = {
canHandle(handlerInput) {
return Alexa.getRequestType(handlerInput.requestEnvelope) === 'IntentRequest'
&& Alexa.getIntentName(handlerInput.requestEnvelope) === 'SetSpeedIntent';
},
handle: function (handlerInput) {
// Bound speed to (1-100)
let speed = Alexa.getSlotValue(handlerInput.requestEnvelope, 'Speed');
speed = Math.max(1, Math.min(100, parseInt(speed)));
Util.putSessionAttribute(handlerInput, 'speed', speed);
return handlerInput.responseBuilder
.speak(`speed set to ${speed} percent.`)
.reprompt("awaiting command")
.getResponse();
}
};
// Construct and send a custom directive to the connected gadget with
// data from the MoveIntent request.
const MoveIntentHandler = {
canHandle(handlerInput) {
return Alexa.getRequestType(handlerInput.requestEnvelope) === 'IntentRequest'
&& Alexa.getIntentName(handlerInput.requestEnvelope) === 'MoveIntent';
},
handle: function (handlerInput) {
const request = handlerInput.requestEnvelope;
const direction = Alexa.getSlotValue(request, 'Direction');
// Duration is optional, use default if not available
const duration = Alexa.getSlotValue(request, 'Duration') || "2";
// Get data from session attribute
const attributesManager = handlerInput.attributesManager;
const speed = attributesManager.getSessionAttributes().speed || "50";
const endpointId = attributesManager.getSessionAttributes().endpointId || [];
// Construct the directive with the payload containing the move parameters
const directive = Util.build(endpointId, NAMESPACE, NAME_CONTROL,
{
type: 'move',
direction: direction,
duration: duration,
speed: speed
});
const speechOutput = (direction === "brake")
? "Applying brake"
: `${direction} ${duration} seconds at ${speed} percent speed`;
return handlerInput.responseBuilder
.speak(speechOutput)
.reprompt("awaiting command")
.addDirective(directive)
.getResponse();
}
};
// Construct and send a custom directive to the connected gadget with data from
// the SetCommandIntent request.
const SetCommandIntentHandler = {
canHandle(handlerInput) {
return Alexa.getRequestType(handlerInput.requestEnvelope) === 'IntentRequest'
&& Alexa.getIntentName(handlerInput.requestEnvelope) === 'SetCommandIntent';
},
handle: function (handlerInput) {
let command = Alexa.getSlotValue(handlerInput.requestEnvelope, 'Command');
if (!command) {
return handlerInput.responseBuilder
.speak("Can you repeat that?")
.reprompt("What was that again?").getResponse();
}
const attributesManager = handlerInput.attributesManager;
let endpointId = attributesManager.getSessionAttributes().endpointId || [];
let speed = attributesManager.getSessionAttributes().speed || "50";
// Construct the directive with the payload containing the move parameters
let directive = Util.build(endpointId, NAMESPACE, NAME_CONTROL,
{
type: 'command',
command: command,
speed: speed
});
return handlerInput.responseBuilder
.speak(`command ${command} activated`)
.reprompt("awaiting command")
.addDirective(directive)
.getResponse();
}
};
// The SkillBuilder acts as the entry point for your skill, routing all request and response
// payloads to the handlers above. Make sure any new handlers or interceptors you've
// defined are included below. The order matters - they're processed top to bottom.
exports.handler = Alexa.SkillBuilders.custom()
.addRequestHandlers(
LaunchRequestHandler,
SetSpeedIntentHandler,
SetCommandIntentHandler,
MoveIntentHandler,
Common.HelpIntentHandler,
Common.CancelAndStopIntentHandler,
Common.SessionEndedRequestHandler,
Common.IntentReflectorHandler, // make sure IntentReflectorHandler is last so it doesn't override your custom intent handlers
)
.addRequestInterceptors(Common.RequestInterceptor)
.addErrorHandlers(
Common.ErrorHandler,
)
.lambda();
Comments
Please log in or sign up to comment.