


Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
| ||||||
| ||||||
The Fire Patrol Drone scans for fires using an IR temperature sensor. The
temperature measurements are sent via MAVLINK to the ground control station, where they are displayed in the QGroundControl UI and compared to a threshold temperature in a custom widget. If the threshold temperature is exceeded, the operator gets notified by an alarm and can directly inspect the location of interest via FPV (first-person-view) goggles and the installed FPV camera for live video analysis of the potential fire. The solution allows for fire patrol of large areas and scalability to operate multiple drones in parallel that only require manual interaction when a fire is detected.
- Defined a custom uORB message sensor_hg_mlx90614.msg.
- Introduced a new example “hovergames“ in src/examples/hovergames. When started, it reads values from the temperature sensor and publishes them as custom uORB messages.
- Added a MavlinkStream for “scaled pressure“-messages in src/modules/mavlink/mavlink_messages.cpp. The code subscribes to our custom uORB sensor message and transmits the measured temperatures via Mavlink MAVLINK_MSG_ID_SCALED_PRESSURE to QGroundControl.
- Configured ”SCALED_PRESSURE“ stream to be sent with 1Hz in src/modules/mavlink/mavlink_main.cpp
- QGroundControl displays received temperatures of type “SCALED_PRESSURE” in the “Values” Widget. If temperature measurements are not shown automatically, select the Preferences wheel and enable Temperature (1).
- Custom widget written in QML for QGroundControl.
- Our custom widget reads and displays the received temperatures from the QGroundControl fact system;
- Our custom widget compares the temperatures against a threshold value. Lower temperatures are reported as Temperature OK, exceeding temperatures cause a Temperature ALARM.
- To enable our custom widget click Widget -> Custom Command -> Load hovergames.qml.
Custom widget in action:
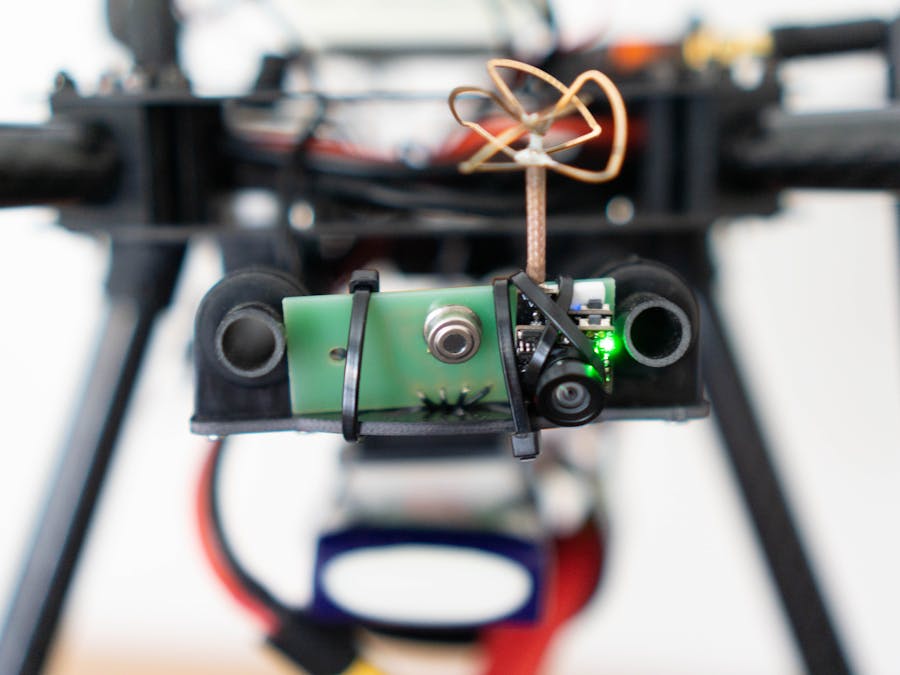
Temperature sensor and FPV camera mounted to Hovergames drone:
Quanum Cyclops FPV goggles:
FPV goggle’s display when the Hovergames drone is turned off:
FPV goggle’s view after turning on the Hovergames drone:
QGroundControl before starting temperature measurements:
Starting and stopping Hovergames temperature measurements:
Temperatures received via Mavlink and displayed in QGroundControl:
Inspection of a fire through FPV goggles after receiving a fire alarm:

{kind=link}
Comments
Please log in or sign up to comment.