#include <wemo.h>
#include <IoTClassroom_CNM.h>
#include <Encoder.h>
#include "Adafruit_SSD1306.h"
#include "colors.h"
#include <neopixel.h>
#define OLED_RESET -1
Adafruit_SSD1306 display(OLED_RESET);
const int BULB5=5;
const int BULB4=4;
const int BULB3=3;
const int BULB2=2;
const int BULB1=1;
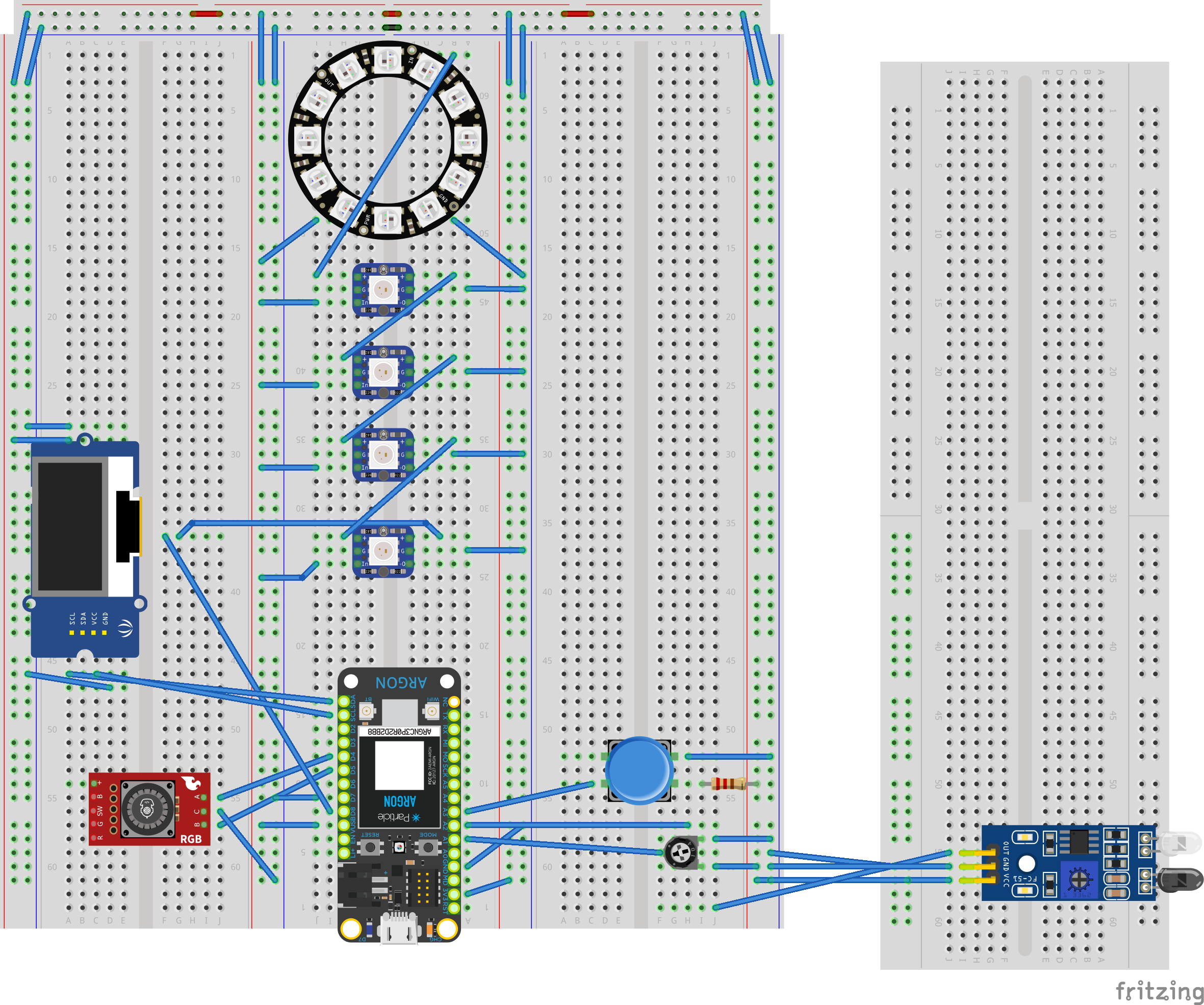
const int button=D3;
const int PIXELPIN = D8 ; // Pin the NeoPixels are connected to
const int PIXELCOUNT = 16; // Total number of NeoPixels
const int MYWEMO=4;
const int button2=A1;
bool buttonState2;
bool toggler2;
int color;
int pixelnumber;
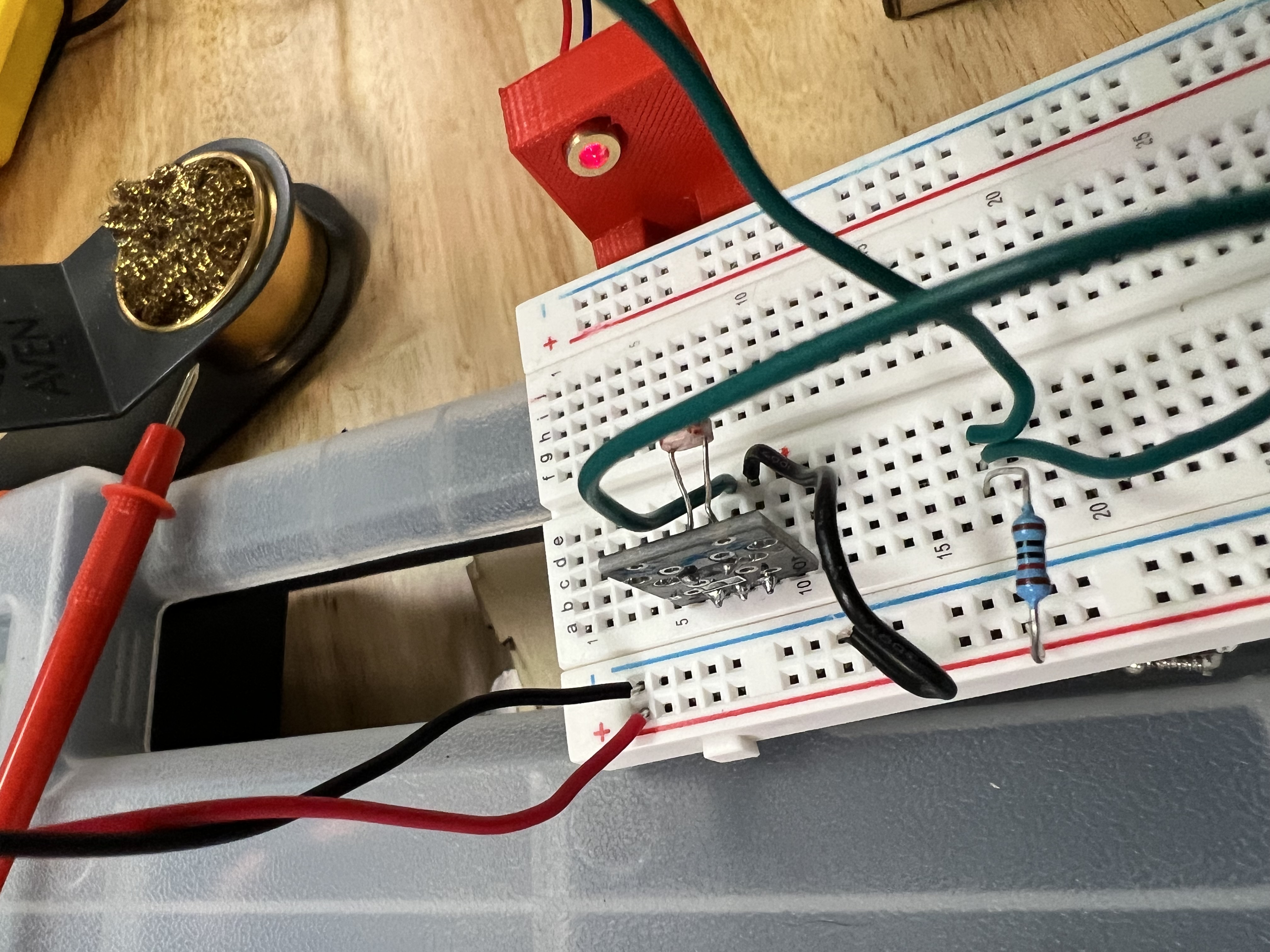
int irsensor= A2;
int sensdata;
bool buttonState;
bool toggler;
bool up;
Adafruit_NeoPixel pixel ( PIXELCOUNT , PIXELPIN , WS2812B );
SYSTEM_MODE(MANUAL); //MANUEL
//SYSTEM_THREAD(ENABLED);
void setup(){
pixel . begin () ;
pixel . show () ;
Wire.begin ();
Serial.begin(9600);
pinMode(A1,INPUT);
display.begin(SSD1306_SWITCHCAPVCC, 0x3C);
display.clearDisplay();
display.display();
pinMode (A2, INPUT);
pinMode( D3, INPUT_PULLDOWN ) ;
Serial.begin(9600);
waitFor(Serial.isConnected,15000);
WiFi.on();
WiFi.setCredentials("IoTNetwork");
WiFi.connect();
while(WiFi.connecting()) {
Serial.printf(".");
}
delay(1000);
Serial.printf("\n\n");
}
void loop(){
if (sensdata>3000){
// display.begin(SSD1306_SWITCHCAPVCC, 0x3C);
for (pixelnumber=0; pixelnumber<=PIXELCOUNT; pixelnumber++) {
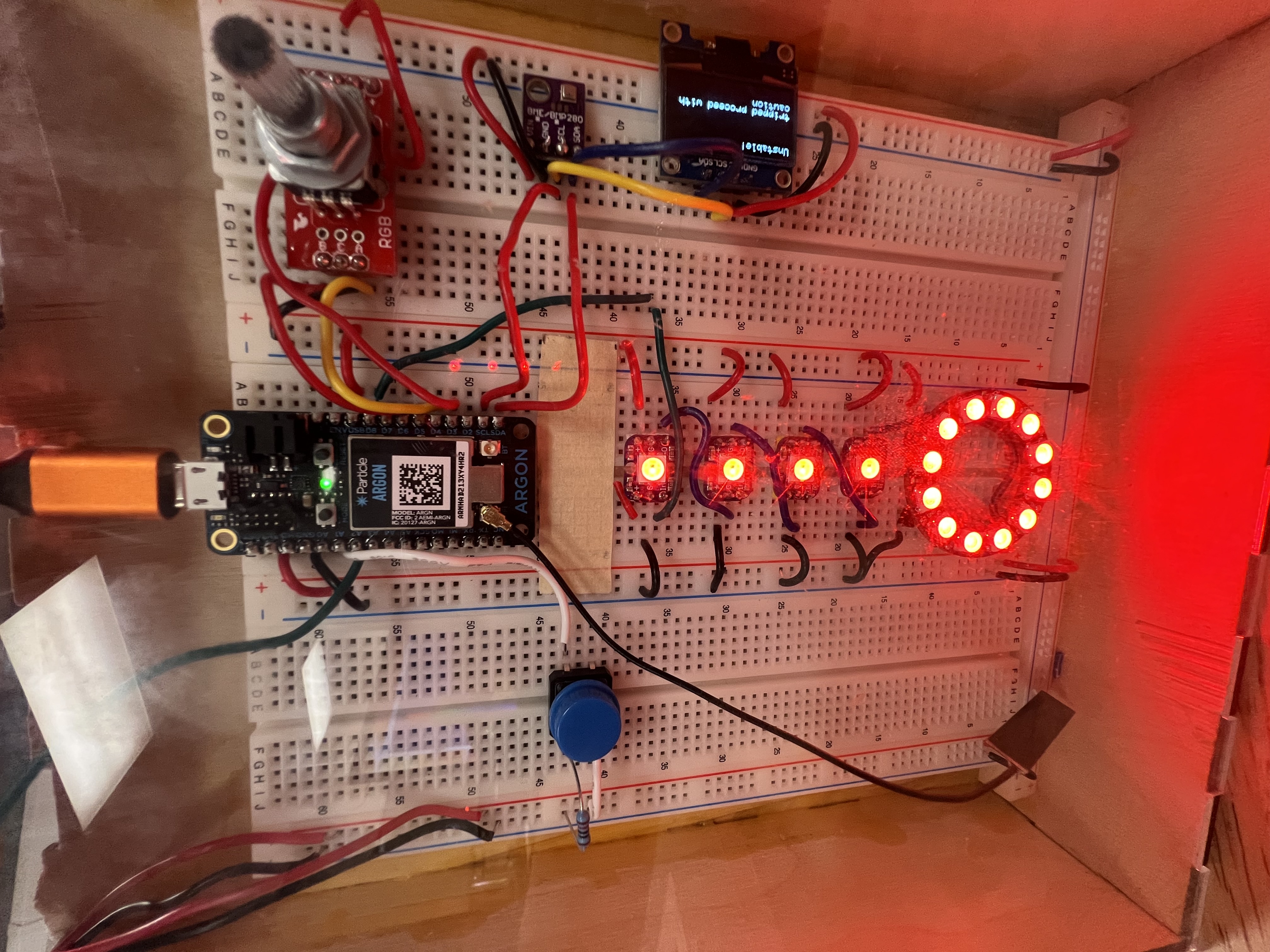
pixel . setPixelColor (pixelnumber , red);
pixel . setBrightness (30) ;
pixel . show () ;
}
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0,0);
display.printf("Unstable!");
display.setTextColor(BLACK, WHITE); // 'inverted' text
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0,35);
display.printf("tripped proceed with caution");
display.display();
Serial.printf("***************************************************unstablw\n\n\n");
buttonState=digitalRead(button);
//switchON(MYWEMO);
setHue(BULB5,true,HueRed,255,255);
setHue(BULB1,true,HueRed,255,255);
setHue(BULB2,true,HueRed,255,255);
setHue(BULB3,true,HueRed,255,255);
setHue(BULB4,true,HueRed,255,255);
}
else{
for (pixelnumber=0; pixelnumber<=PIXELCOUNT; pixelnumber++) {
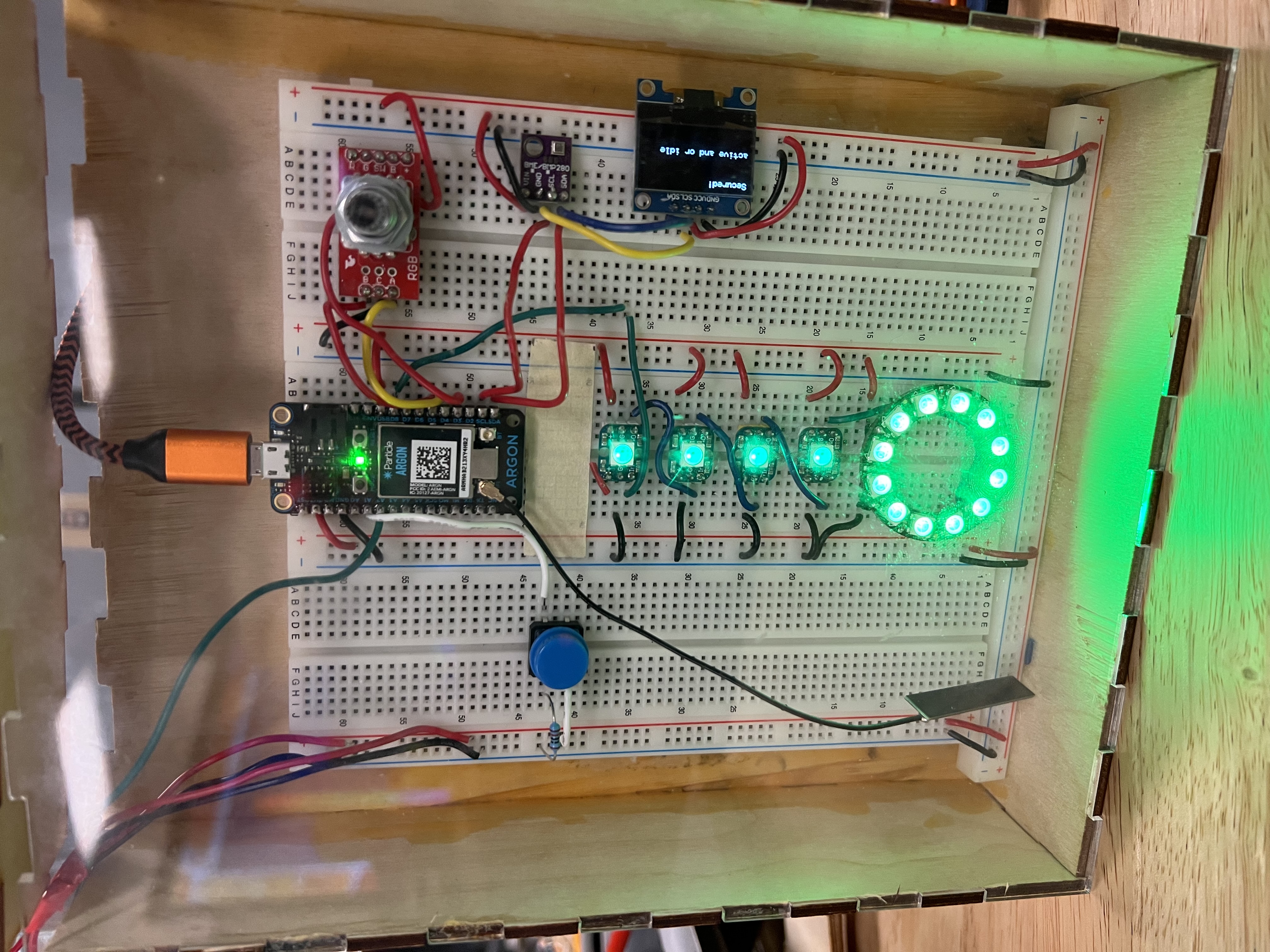
pixel . setPixelColor (pixelnumber , green);
pixel . setBrightness (30) ;
pixel . show () ;
}
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0,0);
display.printf("Secured!");
display.setTextColor(BLACK, WHITE); // 'inverted' text
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0,35);
display.printf("active and or idle");
display.display();
Serial.printf("*****************************************secured\n\n\n");
buttonState=digitalRead(button);
setHue(BULB5,true,HueGreen,255,255);
setHue(BULB1,true,HueGreen,255,255);
setHue(BULB2,true,HueGreen,255,255);
setHue(BULB3,true,HueGreen,255,255);
setHue(BULB4,true,HueGreen,255,255);
sensdata=analogRead(irsensor);
}
sensdata=analogRead(irsensor);
Serial.printf("sensdata%d\n\n",sensdata);
digitalWrite(A5,HIGH);
Serial.printf("%i\r\n\n",sensdata);
buttonState2=digitalRead(button2);
if (buttonState2){
Serial.printf("\n\nbutton2down\n\n");
toggler2=!toggler2;
}
if(toggler2){
switchON(MYWEMO);
Serial.printf("\n\ntogglertrue\n\n");
}
else{
switchOFF(MYWEMO);
Serial.printf("\n\ntogglerfalse\n\n");
}
}










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.