


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 3 | |||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 7 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
| ||||||
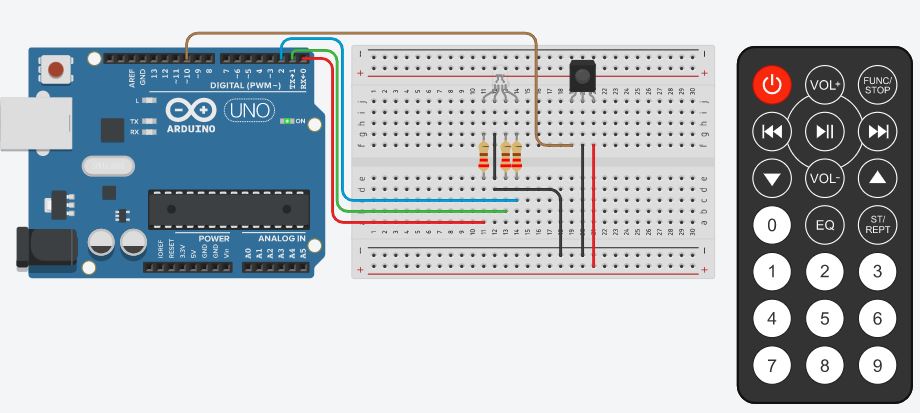
I was playing around with some code and discovered this. Just follow the schematics below and copy the code into the IDE.
GIF of the strobe working.
To make it work, use a remote compatible with the library. To add the library, follow the instructions below. Here is the link to download the library.
https://github.com/z3t0/Arduino-IRremote
1 / 5 • Pg 1
Once you have the library installed, you will be able to run the code.
Your remote might not work, so some trial and error may be encountered.
I suggest using a remote that can be found in many Arduino starter kits.
remote and reciver
{kind=link}

5 projects • 3 followers
I'm at home and currently breathing. Check out my Youtube channel and subscribe at https://www.youtube.com/channel/UCRFGSJgj24tFT080VDW1hLw/
Thanks to z3t0 and John Boxall.
Comments
Please log in or sign up to comment.