



Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
So today we will connect our car to the internet. Literally. Using Arduino MKR1000 & ELM327 micro-controllers we will send various data from car's engine control unit (RPM, Engine temperature, Velocity.....) to the IBM Watson Cloud using MQTT protocol. Also we will create responsive web-app interface using Node-RED (available on IBM Watson Cloud) and custom iOS application with SwiftUI & CocoaPod's MQTT library.
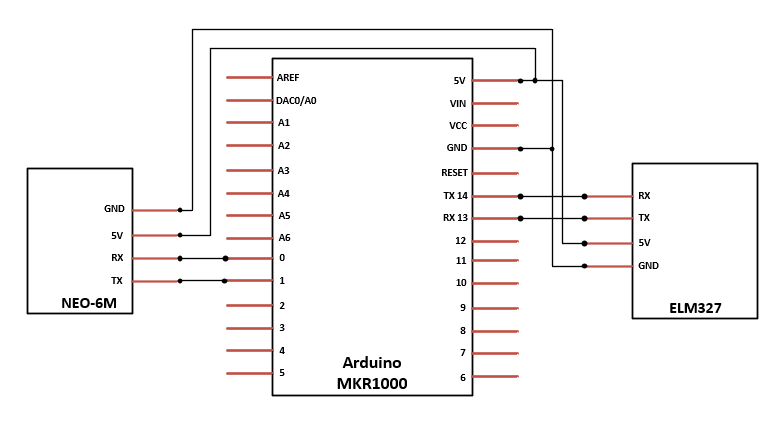
2) Hardware neededCore of the project is based on Arduino MKR1000. The advantage of this little device is embedded WiFi shield, that allows us create connection to the IBM Watson Cloud. Next part is ELM327 - micro-controller connected through UART to the Arduino. This little fellow allows us to read ECU's data using PID codes send from Arduino. Since we are connecting vehicle to the internet, it is good manner to see it's location. So for this reason we are also using NEO-6M GPS module.
3) IBM Watson CloudWatson Cloud is great solution for processing & visualizing collected data. It has various resources, but what You'll basically need is to register on https://cloud.ibm.com/ and create resource for IoT platform. This resource is used as MQTT broker and will generate URL for broker (server). Inside the platform we will create authentication credentials for two MQTT clients - Arduino & iOS application. Also we can change security of broker to TLS optional, since we are sending data in plain text on port 1883. Next thing is creating Node-RED resource. This will allow us to process data from MQTT clients (publishers/subscribers), but also create a web-interface. After successful creation of Node-RED resource we have to import custom palettes. For interconnection between Node-RED resource & IoT platform resource, import node-red-contrib-scx-ibmiotap. For creating web-app ui import nodered-dashboard. Last, but no least, to interconnect Node-RED with IoT platform, go back to your Node-RED resource in Watson Cloud, select Connections/CreateConnection and choose Connect to your resource of IoT platform.
It is important to mention that we are working with free version of IBM Watson Cloud. But since we are sending small ECU data (JSON format) using MQTT (min. overhead size is just 2 Bytes), Cloud's capacity at 200 MB / monthly means enough space in the end.
On figure 3.1 we can see final Node-RED flow, available at the end of this article. Basically You'll need to modify dark-blue nodes - change MQTT credentials based on your IoT platform. All other blocks can stay the same. Maybe there's question why do we have so many function blocks - the answer is, that they are used to split data based on the MQTT topic - e.g. if we have web-app gauge with engine temperature, we will send only engine temperature there and skip other data (RPM, velocity.......).
After successful importing of flow code, hit the Deploy button. To access created web-app UI replace /red/xxxxxx in your URL with /ui
3) Hardware connectionSince Arduino MKR1000 has only one UART connection by default, connect GPS module RX pin to Arduino pin 0 and TX pin to Arduino pin 1. We will define second UART in.ino code.
4) Arduino softwareCode for Arduino is attached in the end of this article. What You'll need to do, is to make sure you have following libraries installed:
WiFi101.h
MQTTClient.h
wiring_private.h
TinyGPS++.h
Next change your Wi-Fi credentials and MQTT credentials based on your IoT platform (broker and client credentials). There is also code for header file premenne.h - make sure you put this file into your project folder, as it obtains functions for retrieving data from vehicle's ECU, with their conversion from HEX to DEC.
5) iOS applicationThis part is completely optional, and doesn't affect running of your web-app. But if you want to have dedicated application, follow these steps:
- Create new Xcode project
- Install Cocoapods using terminal with following commands: sudo gem install cocoapod and pod setup. This process takes a while, so don't worry.
- Change directory inside your terminal to your project folder and issue following command: pod init
- Open created pod file and change target iOS version to 13.0. Also insert MQTT library name to pod file as: pod 'CocoaMQTT' and save the file
- In terminal issue podinstall command, which will start the process of including MQTT library into your project
SwiftUI project codes are included in the end of this article, only things You'll have to change are MQTT credentials in ContentView, based on IBM IoT platform. The output of application is displayed on figure 5.1, where we can see 3 horizontal parts:
a) Buttons on top - used for connecting to MQTT broker and publishing/subscribing to topic of our choice (Temperature, RPM.......)
b) MapView - map with annotation mark informing us of vehicle's current location
c) Horizontal-scrolling menu - gauges with ECU's data
Created Node-RED web-app UI obtains two choices from hamburger menu: Static test - used for retrieving only one value from ECU and Dynamic test - retrieving value from ECU every 2 seconds (based on.ino delays - can be changed). Static test UI is displayed on figure below.
If You have any questions, do not hesitate to ask.
#include <WiFi101.h>
#include <WiFiSSLClient.h> //ak by sme bezali cez SSL (8883)
#include <MQTTClient.h>
#include <wiring_private.h>
#include <TinyGPS++.h>
#include "premenne.h"
/*****************************************/
/* Serial2 */
/*****************************************/
#define PIN_SERIAL2_RX (1ul)
#define PIN_SERIAL2_TX (0ul)
#define PAD_SERIAL2_TX (UART_TX_PAD_0)
#define PAD_SERIAL2_RX (SERCOM_RX_PAD_1)
Uart Serial2(&sercom3, PIN_SERIAL2_RX, PIN_SERIAL2_TX, PAD_SERIAL2_RX, PAD_SERIAL2_TX);
void SERCOM3_Handler()
{
Serial2.IrqHandler();
}
/*****************************************/
/* WiFi */
/*****************************************/
char *ssid = "WIFI_AP";
char *pass = "AP_PWD_37";
WiFiClient net; // Vytvorime WiFi klienta, ktory sa vie pripojit k specifickej adrese a portu
/*****************************************/
/* MQTT */
/*****************************************/
#define ORG "orgid"
#define DEVICE_TYPE "devid"
#define DEVICE_ID "devid2"
#define TOKEN "devtoken"
int status = WL_IDLE_STATUS; // priradenie pre WiFi.status() docasny stav
char *client_id = "d:" ORG ":" DEVICE_TYPE ":" DEVICE_ID;
char *user_id = "use-token-auth";
char *pwd = TOKEN;
char *ibm_hostname = ORG ".messaging.internetofthings.ibmcloud.com";
/*****************************************/
/* OSTATNE PREMENNE */
/*****************************************/
unsigned long cas = 0;
TinyGPSPlus gps;
int awq=0;
/*****************************************/
/* FUNKCIA PRE PRIPOJENIE */
/*****************************************/
void connect_mqtt() {
// Pokial nieje priopojene k wifi AP, bude vypisovat WIFI_CHYBA
while (WiFi.status() != WL_CONNECTED) {
Serial.print(" WIFI_CHYBA ");
delay(1000);
}
// Pokial nieje pripojene k MQTT brokeru, bude vypisovat BROKER_CHYBA
while (!client.connect(client_id, user_id, pwd)) { // v zatvorke uvedene samotne pripojenie k vytvorenemu zariadeniu v IBM CLOUDE
Serial.print(" BROKER_CHYBA ");
delay(1000);
}
// Vypise pripojene, pri uspesnom pripojeni k AP a brokeru
Serial.println("\nPripojene!");
// ODBER TOPICU
client.subscribe("iot-2/cmd/spojka/fmt/json");
}
/*****************************************/
/* FUNKCIA NA SUBSCRIBE */
/*****************************************/
void messageReceived(String &topic, String &payload) {
int prevedene=payload.toInt();
switch (prevedene) {
case 1:
statepmot=pTeplotum();
client.publish("iot-2/evt/teplotam/fmt/json", statepmot);
break;
case 2:
stanapat=pNapatie();
client.publish("iot-2/evt/napatie/fmt/json", stanapat);
break;
case 3:
stazta=pZatazm();
client.publish("iot-2/evt/zatazm/fmt/json", stazta);
break;
case 4:
stateplosan=pTeplotasania();
client.publish("iot-2/evt/teplotasania/fmt/json", stateplosan);
break;
case 5:
staotac=pOtacky();
client.publish("iot-2/evt/otacky/fmt/json", staotac);
break;
case 6:
starychl=pRychlost();
client.publish("iot-2/evt/rychlost/fmt/json", starychl);
break;
case 7:
staVIN=pVIN();
client.publish("iot-2/evt/VIN/fmt/json", staVIN);
break;
case 8:
Serial.println("Restart");
break;
case 9:
statepmot=pTeplotum();
client.publish("iot-2/evt/teplotam/fmt/json", statepmot);
delay(2000);
stanapat=pNapatie();
client.publish("iot-2/evt/napatie/fmt/json", stanapat);
delay(2000);
stazta=pZatazm();
client.publish("iot-2/evt/zatazm/fmt/json", stazta);
delay(2000);
stateplosan=pTeplotasania();
client.publish("iot-2/evt/teplotasania/fmt/json", stateplosan);
delay(2000);
staotac=pOtacky();
client.publish("iot-2/evt/otacky/fmt/json", staotac);
delay(2000);
starychl=pRychlost();
client.publish("iot-2/evt/rychlost/fmt/json", starychl);
delay(2000);
staVIN=pVIN();
client.publish("iot-2/evt/VIN/fmt/json", staVIN);
delay(2000);
break;
case 10:
awq=1;
break;
case 11:
awq=2;
break;
case 12:
awq=3;
break;
case 13:
awq=4;
break;
case 14:
awq=5;
break;
case 15:
awq=6;
break;
case 16:
awq=7;
break;
case 17:
awq=8;
break;
case 18:
awq=9;
break;
case 19:
awq=10;
break;
case 20:
awq=11;
break;
case 21:
awq=12;
break;
case 22:
awq=13;
break;
case 23:
awq=14;
break;
}
}
/*****************************************/
/* ARDUINO SETUP */
/*****************************************/
void setup() {
Serial.begin(9600);
delay(1000);
Serial1.begin(38400); //SPUSTENIE RX TX PRE ELM327
Serial1.println("atl1\r"); // ABY SLI ODPOVEDE NA NEW LINE
delay(1000);
Serial1.println("0105");
delay(1000);
pinPeripheral(1, PIO_SERCOM);
pinPeripheral(0, PIO_SERCOM);
Serial2.begin(9600);
/*****************************************/
/* Pripojenie k WiFi */
/*****************************************/
//Pokial nieje pripojeny k wifi, vypise nazov siete siete ku ktorej sa pripaja:
while (status != WL_CONNECTED) {
Serial.println("\nPripajam sa k wifi s nazvom: ");
Serial.println(ssid);
//WiFi.begin sluzi na pripojenie k sieti, pricom do premennej status priradi stav pripojenia (zmena pre zamzdzenie opakovania podmienky)
status = WiFi.begin(ssid, pass);
//Pockaj 10 sekund na pripojenie:
if (status != WL_CONNECTED) {
delay(10000);
}
}
/*****************************************/
/* Pripojenie k MQTT brokeru */
/*****************************************/
//Pripojenie Arduina do IBM Cloudu pomocou kniznice MQTTClient.h
client.begin(ibm_hostname, 1883, net);
connect_mqtt();
client.onMessage(messageReceived);
}
/*****************************************/
/* ARDUINO LOOP */
/*****************************************/
void loop() {
client.loop(); // Spustenie MQTT publish/subscribe v slucke - jednoducho spracuva odosielane/prijate spravy
delay(10);
// Znova overenie ci sme pripojeny k AP a IBM Cloudu:
if(!client.connected()) {
connect_mqtt();
}
while (Serial2.available() > 0){
gps.encode(Serial2.read());
if (gps.location.isUpdated()){
for(millis(); (millis() - cas) > 5000;){
cas = millis();
latitude=(gps.location.lat());
longitude=(gps.location.lng());
}
}
}
if(awq==1){
client.publish("iot-2/evt/VIN/fmt/json", String(longitude, 6));
delay(1000);
}
else if(awq==2){
client.publish("iot-2/evt/VIN/fmt/json", String(latitude, 6));
delay(1000);
}
else if(awq==3){
awq=0;
}
else if(awq==4){
statepmot=pTeplotum();
client.publish("iot-2/evt/dteplotam/fmt/json", statepmot);
delay(2000);
}
else if(awq==5){
stanapat=pNapatie();
client.publish("iot-2/evt/dnapatie/fmt/json", stanapat);
delay(2000);
}
else if(awq==6){
starychl=pRychlost();
client.publish("iot-2/evt/drychlost/fmt/json", starychl);
delay(2000);
}
else if(awq==7){
staotac=pOtacky();
client.publish("iot-2/evt/dotacky/fmt/json", staotac);
delay(2000);
}
else if(awq==8){
stazta=pZatazm();
client.publish("iot-2/evt/dzatazm/fmt/json", stazta);
delay(2000);
}
else if(awq==9){
stateplosan=pTeplotasania();
client.publish("iot-2/evt/dteplotasania/fmt/json", stateplosan);
delay(2000);
}
else if(awq==10){
client.publish("iot-2/evt/suradnice/fmt/json", pGPS());
delay(2000);
}
else if(awq==11){
inba=GPSmotora();
client.publish("iot-2/evt/suradnicemotor/fmt/json", inba);
delay(2000);
}
else if(awq==12){
inbc=pGPSnapatie();
client.publish("iot-2/evt/suradnicenap/fmt/json", inbc);
delay(2000);
}
else if(awq==13){
inbd=pGPSRychl();
client.publish("iot-2/evt/surarychl/fmt/json", inbd);
delay(2000);
}
else if(awq==14){
inbf=pGPSotacky();
client.publish("iot-2/evt/suraotac/fmt/json", inbf);
delay(2000);
}
}
MQTTClient client(1024); // Vytvorime MQTT klienta - 256 bytov urcuje velkost buffera (defaultne je 128 bytov)
float latitude=40.5;
float longitude=18.5;
String statepmot;
String engine_temp; //1
String suengine_temp;
int vengine_temp;
String stanapat;
String napatie; //2
String snapatie;
int vnapatie;
String stazta;
String zatazm; //4
String szatazm;
int vzatazm;
String stateplosan;
String teplotasania; //5
String steplotasania;
int vteplotasania;
String staotac;
String otackyA; //6
String sotackyA;
int votackyA;
String otackyB; //6
String sotackyB;
int votackyB;
String starychl;
String rychlost; //7
String srychlost;
int vrychlost;
String staVIN;
String inba;
String inbc;
String inbd;
String inbf;
////////////////PREMENNE PRE VIN CISLO
String vincislo;
String podvincislo;
String vinpole[33];
String vinpole2[33];
String ziskanevin;
int vina=0;
////////////////////FUNKCIE
String pTeplotum(){
Serial1.println("0105");
engine_temp = Serial1.readString();
suengine_temp=engine_temp.substring(12,14);
vengine_temp = (strtol(suengine_temp.c_str(),NULL,16))-40;
String pengine_temp = "{\"TeplotaMotora\":";
pengine_temp += vengine_temp;
pengine_temp += "}";
return pengine_temp;
}
String pNapatie(){
Serial1.println("atrv");
napatie = Serial1.readString();
snapatie=napatie.substring(6,15);
vnapatie=snapatie.toInt();
Serial.println("PRVY RIADOK");
Serial.println(napatie);
Serial.println("DRUHY RIADOK");
Serial.println(vnapatie);
String p_napatie = "{\"Napatie\":";
p_napatie += vnapatie;
p_napatie += "}";
return p_napatie;
}
String pZatazm(){
Serial1.println("0104");
zatazm = Serial1.readString();
szatazm=zatazm.substring(12,14);
vzatazm = (strtol(szatazm.c_str(),NULL,16))/2.55;
Serial.println(vzatazm);
String p_zataz = "{\"ZatazMotora\":";
p_zataz += vzatazm;
p_zataz += "}";
return p_zataz;
}
String pTeplotasania(){
Serial1.println("010F");
teplotasania = Serial1.readString();
steplotasania=teplotasania.substring(12,14);
vteplotasania = (strtol(steplotasania.c_str(),NULL,16))-40;
Serial.println(vteplotasania);
String p_tesania = "{\"TeplotaSania\":";
p_tesania += vteplotasania;
p_tesania += "}";
return p_tesania;
}
//////////*********
String pOtacky(){
Serial1.println("010C");
otackyA = Serial1.readString();
sotackyA=otackyA.substring(12,14);
sotackyB=otackyA.substring(15,17);
votackyA = ((256*(strtol(sotackyA.c_str(),NULL,16)))+(strtol(sotackyB.c_str(),NULL,16)))/4;
Serial.println(votackyA);
String p_otacky = "{\"Otacky\":";
p_otacky += votackyA;
p_otacky += "}";
return p_otacky;
}
String pRychlost(){
Serial1.println("010D");
rychlost = Serial1.readString();
srychlost=rychlost.substring(12,14);
vrychlost = (strtol(srychlost.c_str(),NULL,16));
Serial.println(vrychlost);
String pcar_speed = "{\"Rychlost\":";
pcar_speed += vrychlost;
pcar_speed += "}";
return pcar_speed;
}
String pGPSRychl(){
Serial1.println("010D");
rychlost = Serial1.readString();
srychlost=rychlost.substring(12,14);
vrychlost = (strtol(srychlost.c_str(),NULL,16));
Serial.println(vrychlost);
String pcar_speed = "{\"Longituda\":";
pcar_speed += String(longitude, 6);
pcar_speed += ",\"Latituda\":";
pcar_speed += String(latitude, 6);
pcar_speed += ",\"Rychlost\":";
pcar_speed += vrychlost;
pcar_speed += "}";
return pcar_speed;
}
String pGPS(){
String navka = "{\"Longituda\":";
navka += String(longitude, 6);
navka += ",\"Latituda\":";
navka += String(latitude, 6);
navka += "}";
return navka;
}
String GPSmotora(){
Serial1.println("0105");
engine_temp = Serial1.readString();
suengine_temp=engine_temp.substring(12,14);
vengine_temp = (strtol(suengine_temp.c_str(),NULL,16))-40;
String pengine_temp = "{\"Longituda\":";
pengine_temp += String(longitude, 6);
pengine_temp += ",\"Latituda\":";
pengine_temp += String(latitude, 6);
pengine_temp += ",\"Teplota\":";
pengine_temp += vengine_temp;
pengine_temp += "}";
return pengine_temp;
}
String pGPSnapatie(){
Serial1.println("atrv");
napatie = Serial1.readString();
snapatie=napatie.substring(6,15);
vnapatie=snapatie.toInt();
String p_napatie = "{\"Longituda\":";
p_napatie += String(longitude, 6);
p_napatie += ",\"Latituda\":";
p_napatie += String(latitude, 6);
p_napatie += ",\"Napatie\":";
p_napatie += vnapatie;
p_napatie += "}";
return p_napatie;
}
String pGPSotacky(){
Serial1.println("010C");
otackyA = Serial1.readString();
sotackyA=otackyA.substring(12,14);
sotackyB=otackyA.substring(15,17);
votackyA = ((256*(strtol(sotackyA.c_str(),NULL,16)))+(strtol(sotackyB.c_str(),NULL,16)))/4;
Serial.println(votackyA);
String p_otacky = "{\"Longituda\":";
p_otacky += String(longitude, 6);
p_otacky += ",\"Latituda\":";
p_otacky += String(latitude, 6);
p_otacky += ",\"Otacky\":";
p_otacky += votackyA;
p_otacky += "}";
return p_otacky;
}
String pVIN(){
Serial1.println("0902");
vincislo = Serial1.readString();
vincislo.replace("\n","");
vincislo.replace(" ","");
vincislo.replace(":","");
podvincislo=vincislo.substring(15,21)+vincislo.substring(22,36)+vincislo.substring(37,51);
for (int i=0; i<33; i++){
if (i%2 == 0){
vinpole[i]="0x"+(podvincislo.substring(i,i+2));
vinpole2[i]=(char)(strtol((vinpole[i]).c_str(),NULL,16));
}
}
while (vina<33){
ziskanevin+=vinpole2[vina];
vina+=2;
}
String pVIN = "{\"VIN\":\"";
pVIN += ziskanevin;
pVIN += "\"}";
return pVIN;
}
[
{
"id": "5c322bcd.0d7e24",
"type": "tab",
"label": "Flow 1",
"disabled": false,
"info": ""
},
{
"id": "fe020458.d37fb8",
"type": "ibmiot in",
"z": "5c322bcd.0d7e24",
"authentication": "boundService",
"apiKey": "",
"inputType": "evt",
"logicalInterface": "",
"ruleId": "",
"deviceId": "IDkontroler",
"applicationId": "",
"deviceType": "Mikrokontroler",
"eventType": "+",
"commandType": "",
"format": "json",
"name": "IBM IoT",
"service": "registered",
"allDevices": "",
"allApplications": "",
"allDeviceTypes": false,
"allLogicalInterfaces": "",
"allEvents": true,
"allCommands": "",
"allFormats": false,
"qos": 0,
"x": 70,
"y": 80,
"wires": [
[
"82d427c1.5f1e38",
"43f37536.a7fcec",
"1435a819.13f948",
"6388de69.38c86",
"7b79441a.0c9a0c",
"34e21a58.f23676",
"4f372508.eed40c",
"ffca5f60.a2836",
"1d98f4df.46248b",
"a0a16110.3d97d",
"9cbffc43.6fae4",
"804e7a.3d19e188",
"c95b86aa.ff9988",
"e2afa857.055908",
"f050f736.555a78",
"2887474f.3903a8",
"c334c204.254a9",
"a11eb45f.d38ef8",
"9d5ef054.3aeed"
]
]
},
{
"id": "c2fcb0e4.9df3c",
"type": "ibmiot out",
"z": "5c322bcd.0d7e24",
"authentication": "boundService",
"apiKey": "",
"outputType": "cmd",
"deviceId": "IDkontroler",
"deviceType": "Mikrokontroler",
"eventCommandType": "spojka",
"format": "json",
"data": "{}",
"qos": 0,
"name": "IBM IoT",
"service": "registered",
"x": 840,
"y": 620,
"wires": []
},
{
"id": "4f20b8e8.6d0368",
"type": "ui_button",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "b15ee046.8c935",
"order": 1,
"width": 0,
"height": 0,
"passthru": false,
"label": "Engine temp",
"tooltip": "",
"color": "",
"bgcolor": "",
"icon": "",
"payload": "\"1\"",
"payloadType": "json",
"topic": "spojka",
"x": 110,
"y": 460,
"wires": [
[
"c2fcb0e4.9df3c"
]
]
},
{
"id": "aec1cc46.8c43a",
"type": "ui_button",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "f7606a4e.234618",
"order": 1,
"width": 0,
"height": 0,
"passthru": false,
"label": "Engine load",
"tooltip": "",
"color": "",
"bgcolor": "",
"icon": "",
"payload": "\"3\"",
"payloadType": "json",
"topic": "spojka",
"x": 110,
"y": 540,
"wires": [
[
"c2fcb0e4.9df3c"
]
]
},
{
"id": "180233f4.ae6cdc",
"type": "ui_button",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "f943ae3.4d5b75",
"order": 1,
"width": 0,
"height": 0,
"passthru": false,
"label": "Intake air temp",
"tooltip": "",
"color": "",
"bgcolor": "",
"icon": "",
"payload": "\"4\"",
"payloadType": "json",
"topic": "spojka",
"x": 120,
"y": 580,
"wires": [
[
"c2fcb0e4.9df3c"
]
]
},
{
"id": "3da42317.916b5c",
"type": "ui_button",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "b3c559b3.3e97d8",
"order": 1,
"width": 0,
"height": 0,
"passthru": false,
"label": "Battery voltage",
"tooltip": "",
"color": "",
"bgcolor": "",
"icon": "",
"payload": "\"2\"",
"payloadType": "json",
"topic": "spojka",
"x": 120,
"y": 500,
"wires": [
[
"c2fcb0e4.9df3c"
]
]
},
{
"id": "29d384f.73d7a7c",
"type": "ui_button",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "34ec3061.6e984",
"order": 1,
"width": 0,
"height": 0,
"passthru": false,
"label": "RPM",
"tooltip": "",
"color": "",
"bgcolor": "",
"icon": "",
"payload": "\"5\"",
"payloadType": "json",
"topic": "spojka",
"x": 90,
"y": 620,
"wires": [
[
"c2fcb0e4.9df3c",
"91e819d.952aee8"
]
]
},
{
"id": "93e16f5a.1cf5c",
"type": "ui_button",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "3fc295fe.9f49ca",
"order": 1,
"width": 0,
"height": 0,
"passthru": false,
"label": "Velocity",
"tooltip": "",
"color": "",
"bgcolor": "",
"icon": "",
"payload": "\"6\"",
"payloadType": "json",
"topic": "spojka",
"x": 100,
"y": 660,
"wires": [
[
"c2fcb0e4.9df3c"
]
]
},
{
"id": "f14580c0.81f91",
"type": "ui_button",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "3621392d.b91016",
"order": 1,
"width": 0,
"height": 0,
"passthru": false,
"label": "VIN",
"tooltip": "",
"color": "",
"bgcolor": "",
"icon": "",
"payload": "\"7\"",
"payloadType": "json",
"topic": "spojka",
"x": 90,
"y": 700,
"wires": [
[
"c2fcb0e4.9df3c"
]
]
},
{
"id": "82d427c1.5f1e38",
"type": "function",
"z": "5c322bcd.0d7e24",
"name": "",
"func": "switch (msg.topic){\n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/teplotam/fmt/json\":\n return {payload:msg.payload.TeplotaMotora};\n break;\n \n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/teplotao/fmt/json\":\n return {payload:msg.payload.TeplotaOleja};\n break;\n \n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/rychlost/fmt/json\":\n return {payload:msg.payload.Rychlost};\n break;\n \n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/otacky/fmt/json\":\n return {payload:msg.payload.Otacky};\n break;\n \n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/benzin/fmt/json\":\n return {payload:msg.payload.Benzin};\n break;\n \n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/teplotav/fmt/json\":\n return {payload:msg.payload.TeplotaVzduchu};\n break;\n \n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/dtcs/fmt/json\":\n return {payload:msg.payload.DTCs};\n break;\n \n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/vycisti/fmt/json\":\n return {payload:msg.payload.Vycisti};\n break; \n}",
"outputs": 1,
"noerr": 0,
"x": 250,
"y": 80,
"wires": [
[
"5bd2c651.2adea8"
]
]
},
{
"id": "5bd2c651.2adea8",
"type": "debug",
"z": "5c322bcd.0d7e24",
"name": "",
"active": false,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "false",
"x": 490,
"y": 80,
"wires": []
},
{
"id": "43f37536.a7fcec",
"type": "function",
"z": "5c322bcd.0d7e24",
"name": "",
"func": "switch (msg.topic){\n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/teplotam/fmt/json\":\n return {payload:msg.payload.TeplotaMotora};\n}\n\n\n\n\n\n",
"outputs": 1,
"noerr": 0,
"x": 250,
"y": 120,
"wires": [
[
"fe99fbd4.9109b8",
"f2ad5cb4.ababd"
]
]
},
{
"id": "1435a819.13f948",
"type": "function",
"z": "5c322bcd.0d7e24",
"name": "",
"func": "switch (msg.topic){\n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/napatie/fmt/json\":\n return {payload:msg.payload.Napatie};\n}",
"outputs": 1,
"noerr": 0,
"x": 250,
"y": 160,
"wires": [
[
"e7e764ae.4ca5e8"
]
]
},
{
"id": "6388de69.38c86",
"type": "function",
"z": "5c322bcd.0d7e24",
"name": "",
"func": "switch (msg.topic){\n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/zatazm/fmt/json\":\n return {payload:msg.payload.ZatazMotora};\n}",
"outputs": 1,
"noerr": 0,
"x": 250,
"y": 200,
"wires": [
[
"7eadc7ad.7cf6e8"
]
]
},
{
"id": "7b79441a.0c9a0c",
"type": "function",
"z": "5c322bcd.0d7e24",
"name": "",
"func": "switch (msg.topic){\n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/teplotasania/fmt/json\":\n return {payload:msg.payload.TeplotaSania};\n}",
"outputs": 1,
"noerr": 0,
"x": 250,
"y": 240,
"wires": [
[
"45872dba.55fcd4"
]
]
},
{
"id": "34e21a58.f23676",
"type": "function",
"z": "5c322bcd.0d7e24",
"name": "",
"func": "switch (msg.topic){\n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/otacky/fmt/json\":\n return {payload:msg.payload.Otacky};\n}",
"outputs": 1,
"noerr": 0,
"x": 250,
"y": 280,
"wires": [
[
"2a0f2623.21943a"
]
]
},
{
"id": "ffca5f60.a2836",
"type": "function",
"z": "5c322bcd.0d7e24",
"name": "",
"func": "switch (msg.topic){\n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/VIN/fmt/json\":\n return {payload:msg.payload.VIN};\n}",
"outputs": 1,
"noerr": 0,
"x": 250,
"y": 360,
"wires": [
[
"f5ad1b10.a28e28"
]
]
},
{
"id": "4f372508.eed40c",
"type": "function",
"z": "5c322bcd.0d7e24",
"name": "",
"func": "switch (msg.topic){\n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/rychlost/fmt/json\":\n return {payload:msg.payload.Rychlost};\n}",
"outputs": 1,
"noerr": 0,
"x": 250,
"y": 320,
"wires": [
[
"57ee1e71.74562"
]
]
},
{
"id": "e7e764ae.4ca5e8",
"type": "ui_gauge",
"z": "5c322bcd.0d7e24",
"name": "napatieS",
"group": "b3c559b3.3e97d8",
"order": 2,
"width": "6",
"height": "4",
"gtype": "wave",
"title": "",
"label": "V",
"format": "{{value}}",
"min": "0",
"max": "15",
"colors": [
"#00b500",
"#e6e600",
"#ca3838"
],
"seg1": "",
"seg2": "",
"x": 480,
"y": 160,
"wires": []
},
{
"id": "7eadc7ad.7cf6e8",
"type": "ui_gauge",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "f7606a4e.234618",
"order": 2,
"width": 0,
"height": 0,
"gtype": "gage",
"title": "",
"label": "%",
"format": "{{value}}",
"min": "0",
"max": "100",
"colors": [
"#fee849",
"#e39a02",
"#d21515"
],
"seg1": "",
"seg2": "",
"x": 470,
"y": 200,
"wires": []
},
{
"id": "45872dba.55fcd4",
"type": "ui_gauge",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "f943ae3.4d5b75",
"order": 2,
"width": 0,
"height": 0,
"gtype": "gage",
"title": "",
"label": "° C",
"format": "{{value}}",
"min": "-40",
"max": "40",
"colors": [
"#00ff00",
"#ffff00",
"#e60000"
],
"seg1": "",
"seg2": "",
"x": 470,
"y": 240,
"wires": []
},
{
"id": "2a0f2623.21943a",
"type": "ui_gauge",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "34ec3061.6e984",
"order": 2,
"width": 0,
"height": 0,
"gtype": "gage",
"title": "",
"label": "RPM",
"format": "{{value}}",
"min": 0,
"max": "8000",
"colors": [
"#ffffff",
"#00e611",
"#000000"
],
"seg1": "",
"seg2": "",
"x": 470,
"y": 280,
"wires": []
},
{
"id": "57ee1e71.74562",
"type": "ui_gauge",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "3fc295fe.9f49ca",
"order": 2,
"width": 0,
"height": 0,
"gtype": "gage",
"title": "",
"label": "kmh",
"format": "{{value}}",
"min": "0",
"max": "250",
"colors": [
"#0000c6",
"#caceff",
"#ec1e00"
],
"seg1": "",
"seg2": "",
"x": 470,
"y": 320,
"wires": []
},
{
"id": "f5ad1b10.a28e28",
"type": "ui_text",
"z": "5c322bcd.0d7e24",
"group": "3621392d.b91016",
"order": 2,
"width": 6,
"height": 4,
"name": "",
"label": "",
"format": "{{msg.payload}}",
"layout": "col-center",
"x": 470,
"y": 360,
"wires": []
},
{
"id": "7ed3d7b9.a233a8",
"type": "function",
"z": "5c322bcd.0d7e24",
"name": "",
"func": " return {payload:\"\"};",
"outputs": 1,
"noerr": 0,
"x": 310,
"y": 420,
"wires": [
[
"e7e764ae.4ca5e8",
"7eadc7ad.7cf6e8",
"45872dba.55fcd4",
"2a0f2623.21943a",
"57ee1e71.74562",
"f5ad1b10.a28e28",
"f2ad5cb4.ababd"
]
]
},
{
"id": "f2ad5cb4.ababd",
"type": "ui_gauge",
"z": "5c322bcd.0d7e24",
"name": "motorS",
"group": "b15ee046.8c935",
"order": 2,
"width": 0,
"height": 0,
"gtype": "gage",
"title": "",
"label": "° C",
"format": "{{value}}",
"min": 0,
"max": "90",
"colors": [
"#00b500",
"#e6e600",
"#ca3838"
],
"seg1": "",
"seg2": "",
"x": 480,
"y": 120,
"wires": []
},
{
"id": "fde36889.95bd38",
"type": "ui_button",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "7b6ef1b8.16383",
"order": 1,
"width": "6",
"height": "1",
"passthru": false,
"label": "Read all",
"tooltip": "",
"color": "",
"bgcolor": "",
"icon": "",
"payload": "\"9\"",
"payloadType": "json",
"topic": "spojka",
"x": 100,
"y": 740,
"wires": [
[
"c2fcb0e4.9df3c"
]
]
},
{
"id": "907051c2.7f0d6",
"type": "ui_button",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "6f469820.86dbc8",
"order": 1,
"width": 0,
"height": 0,
"passthru": false,
"label": "Engine temp",
"tooltip": "",
"color": "",
"bgcolor": "",
"icon": "",
"payload": "\"13\"",
"payloadType": "json",
"topic": "spojka",
"x": 650,
"y": 460,
"wires": [
[
"c2fcb0e4.9df3c",
"6d5bcc4c.efd854"
]
]
},
{
"id": "92f1767a.688ed8",
"type": "ui_button",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "c5be57a5.510478",
"order": 1,
"width": 0,
"height": 0,
"passthru": false,
"label": "Battery voltage",
"tooltip": "",
"color": "",
"bgcolor": "",
"icon": "",
"payload": "\"14\"",
"payloadType": "json",
"topic": "spojka",
"x": 660,
"y": 500,
"wires": [
[
"c2fcb0e4.9df3c"
]
]
},
{
"id": "885fc116.356fd",
"type": "ui_button",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "5030d833.9eefd8",
"order": 1,
"width": "0",
"height": "0",
"passthru": false,
"label": "Velocity",
"tooltip": "",
"color": "",
"bgcolor": "",
"icon": "",
"payload": "\"15\"",
"payloadType": "json",
"topic": "spojka",
"x": 640,
"y": 540,
"wires": [
[
"c2fcb0e4.9df3c"
]
]
},
{
"id": "d51c239f.9016e",
"type": "ui_button",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "be34be57.b6c16",
"order": 1,
"width": 0,
"height": 0,
"passthru": false,
"label": "RPM",
"tooltip": "",
"color": "",
"bgcolor": "",
"icon": "",
"payload": "\"16\"",
"payloadType": "json",
"topic": "spojka",
"x": 610,
"y": 700,
"wires": [
[
"c2fcb0e4.9df3c"
]
]
},
{
"id": "82b1f1c0.61c95",
"type": "ui_button",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "9e83fd0.ce74c",
"order": 1,
"width": 0,
"height": 0,
"passthru": false,
"label": "Engine load",
"tooltip": "",
"color": "",
"bgcolor": "",
"icon": "",
"payload": "\"17\"",
"payloadType": "json",
"topic": "spojka",
"x": 630,
"y": 740,
"wires": [
[
"c2fcb0e4.9df3c"
]
]
},
{
"id": "fc2fd3d3.92929",
"type": "ui_button",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "2c1d9538.5680ea",
"order": 1,
"width": 0,
"height": 0,
"passthru": false,
"label": "Intake air temp",
"tooltip": "",
"color": "",
"bgcolor": "",
"icon": "",
"payload": "\"18\"",
"payloadType": "json",
"topic": "spojka",
"x": 640,
"y": 780,
"wires": [
[
"c2fcb0e4.9df3c"
]
]
},
{
"id": "5e6ca779.597a68",
"type": "ui_button",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "a006a90c.461b58",
"order": 0,
"width": "6",
"height": "5",
"passthru": false,
"label": "RESTART",
"tooltip": "",
"color": "",
"bgcolor": "",
"icon": "",
"payload": "\"12\"",
"payloadType": "json",
"topic": "spojka",
"x": 650,
"y": 420,
"wires": [
[
"c2fcb0e4.9df3c",
"89ddbf44.c92b3"
]
]
},
{
"id": "e26b8480.6ed6a8",
"type": "ui_gauge",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "6f469820.86dbc8",
"order": 2,
"width": 0,
"height": 0,
"gtype": "gage",
"title": "",
"label": "° C",
"format": "{{value}}",
"min": 0,
"max": "90",
"colors": [
"#00b500",
"#e6e600",
"#ca3838"
],
"seg1": "",
"seg2": "",
"x": 890,
"y": 80,
"wires": []
},
{
"id": "25282f33.397db",
"type": "ui_gauge",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "c5be57a5.510478",
"order": 2,
"width": "6",
"height": "4",
"gtype": "wave",
"title": "",
"label": "V",
"format": "{{value}}",
"min": 0,
"max": "15",
"colors": [
"#00b500",
"#e6e600",
"#ca3838"
],
"seg1": "",
"seg2": "",
"x": 890,
"y": 120,
"wires": []
},
{
"id": "9b7438b8.d46d08",
"type": "ui_gauge",
"z": "5c322bcd.0d7e24",
"name": "zatazmD",
"group": "9e83fd0.ce74c",
"order": 2,
"width": 0,
"height": 0,
"gtype": "gage",
"title": "",
"label": "%",
"format": "{{value}}",
"min": 0,
"max": "100",
"colors": [
"#00b500",
"#e6e600",
"#ca3838"
],
"seg1": "",
"seg2": "",
"x": 900,
"y": 160,
"wires": []
},
{
"id": "416cd75.90f5128",
"type": "ui_gauge",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "2c1d9538.5680ea",
"order": 2,
"width": 0,
"height": 0,
"gtype": "gage",
"title": "",
"label": "° C",
"format": "{{value}}",
"min": "-40",
"max": "40",
"colors": [
"#00b500",
"#e6e600",
"#ca3838"
],
"seg1": "",
"seg2": "",
"x": 890,
"y": 200,
"wires": []
},
{
"id": "487f89ae.f1e818",
"type": "ui_gauge",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "5030d833.9eefd8",
"order": 2,
"width": 0,
"height": 0,
"gtype": "gage",
"title": "",
"label": "kmh",
"format": "{{value}}",
"min": 0,
"max": "250",
"colors": [
"#00b500",
"#e6e600",
"#ca3838"
],
"seg1": "",
"seg2": "",
"x": 890,
"y": 280,
"wires": []
},
{
"id": "3ad69aee.451986",
"type": "ui_gauge",
"z": "5c322bcd.0d7e24",
"name": "otackyD",
"group": "be34be57.b6c16",
"order": 2,
"width": 0,
"height": 0,
"gtype": "gage",
"title": "",
"label": "RPM",
"format": "{{value}}",
"min": 0,
"max": "7000",
"colors": [
"#00b500",
"#e6e600",
"#ca3838"
],
"seg1": "",
"seg2": "",
"x": 900,
"y": 240,
"wires": []
},
{
"id": "1d98f4df.46248b",
"type": "function",
"z": "5c322bcd.0d7e24",
"name": "dteplotam",
"func": "switch (msg.topic){\n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/dteplotam/fmt/json\":\n return {payload:msg.payload.TeplotaMotora};\n}",
"outputs": 1,
"noerr": 0,
"x": 680,
"y": 80,
"wires": [
[
"e26b8480.6ed6a8",
"bb009985.60d978"
]
]
},
{
"id": "a0a16110.3d97d",
"type": "function",
"z": "5c322bcd.0d7e24",
"name": "dnapatie",
"func": "switch (msg.topic){\n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/dnapatie/fmt/json\":\n return {payload:msg.payload.Napatie};\n}",
"outputs": 1,
"noerr": 0,
"x": 680,
"y": 120,
"wires": [
[
"25282f33.397db",
"110734fb.37ff5b"
]
]
},
{
"id": "9cbffc43.6fae4",
"type": "function",
"z": "5c322bcd.0d7e24",
"name": "dzatazm",
"func": "switch (msg.topic){\n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/dzatazm/fmt/json\":\n return {payload:msg.payload.ZatazMotora};\n}",
"outputs": 1,
"noerr": 0,
"x": 680,
"y": 160,
"wires": [
[
"9b7438b8.d46d08"
]
]
},
{
"id": "804e7a.3d19e188",
"type": "function",
"z": "5c322bcd.0d7e24",
"name": "dteplotasania",
"func": "switch (msg.topic){\n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/dteplotasania/fmt/json\":\n return {payload:msg.payload.TeplotaSania};\n}",
"outputs": 1,
"noerr": 0,
"x": 690,
"y": 200,
"wires": [
[
"416cd75.90f5128"
]
]
},
{
"id": "c95b86aa.ff9988",
"type": "function",
"z": "5c322bcd.0d7e24",
"name": "dotacky",
"func": "switch (msg.topic){\n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/dotacky/fmt/json\":\n return {payload:msg.payload.Otacky};\n}",
"outputs": 1,
"noerr": 0,
"x": 680,
"y": 240,
"wires": [
[
"3ad69aee.451986",
"3206e8b5.b2df78"
]
]
},
{
"id": "e2afa857.055908",
"type": "function",
"z": "5c322bcd.0d7e24",
"name": "drychlost",
"func": "switch (msg.topic){\n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/drychlost/fmt/json\":\n return {payload:msg.payload.Rychlost};\n}",
"outputs": 1,
"noerr": 0,
"x": 680,
"y": 280,
"wires": [
[
"487f89ae.f1e818",
"79739b5d.19d3a4"
]
]
},
{
"id": "89ddbf44.c92b3",
"type": "function",
"z": "5c322bcd.0d7e24",
"name": "",
"func": " return {payload:\"\"};",
"outputs": 1,
"noerr": 0,
"x": 670,
"y": 340,
"wires": [
[
"e26b8480.6ed6a8",
"25282f33.397db",
"9b7438b8.d46d08",
"416cd75.90f5128",
"3ad69aee.451986",
"487f89ae.f1e818"
]
]
},
{
"id": "f050f736.555a78",
"type": "debug",
"z": "5c322bcd.0d7e24",
"name": "",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "false",
"x": 260,
"y": 20,
"wires": []
},
{
"id": "bb009985.60d978",
"type": "ibmiot out",
"z": "5c322bcd.0d7e24",
"authentication": "boundService",
"apiKey": "",
"outputType": "cmd",
"deviceId": "ios_i",
"deviceType": "ios_t",
"eventCommandType": "teplota",
"format": "json",
"data": "{}",
"qos": 0,
"name": "IBM IoT",
"service": "registered",
"x": 1140,
"y": 80,
"wires": []
},
{
"id": "110734fb.37ff5b",
"type": "ibmiot out",
"z": "5c322bcd.0d7e24",
"authentication": "boundService",
"apiKey": "",
"outputType": "cmd",
"deviceId": "ios_i",
"deviceType": "ios_t",
"eventCommandType": "napatie",
"format": "json",
"data": "{}",
"qos": 0,
"name": "IBM IoT",
"service": "registered",
"x": 1140,
"y": 120,
"wires": []
},
{
"id": "79739b5d.19d3a4",
"type": "ibmiot out",
"z": "5c322bcd.0d7e24",
"authentication": "boundService",
"apiKey": "",
"outputType": "cmd",
"deviceId": "ios_i",
"deviceType": "ios_t",
"eventCommandType": "rychlost",
"format": "json",
"data": "{}",
"qos": 0,
"name": "IBM IoT",
"service": "registered",
"x": 1140,
"y": 280,
"wires": []
},
{
"id": "3206e8b5.b2df78",
"type": "ibmiot out",
"z": "5c322bcd.0d7e24",
"authentication": "boundService",
"apiKey": "",
"outputType": "cmd",
"deviceId": "ios_i",
"deviceType": "ios_t",
"eventCommandType": "otacky",
"format": "json",
"data": "{}",
"qos": 0,
"name": "IBM IoT",
"service": "registered",
"x": 1140,
"y": 240,
"wires": []
},
{
"id": "6d5bcc4c.efd854",
"type": "debug",
"z": "5c322bcd.0d7e24",
"name": "",
"active": false,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "payload",
"targetType": "msg",
"x": 870,
"y": 480,
"wires": []
},
{
"id": "26a88bb.6c9d574",
"type": "ibmiot in",
"z": "5c322bcd.0d7e24",
"authentication": "boundService",
"apiKey": "",
"inputType": "evt",
"logicalInterface": "",
"ruleId": "",
"deviceId": "ios_i",
"applicationId": "",
"deviceType": "ios_t",
"eventType": "+",
"commandType": "spojka",
"format": "json",
"name": "IBM IoT",
"service": "registered",
"allDevices": "",
"allApplications": "",
"allDeviceTypes": "",
"allLogicalInterfaces": "",
"allEvents": true,
"allCommands": "",
"allFormats": true,
"qos": 0,
"x": 830,
"y": 360,
"wires": [
[
"63392018.ad6dc"
]
]
},
{
"id": "63392018.ad6dc",
"type": "function",
"z": "5c322bcd.0d7e24",
"name": "",
"func": "switch (msg.topic){\n case \"iot-2/type/ios_t/id/ios_i/evt/ahoj/fmt/json\":\n return {payload:msg.payload.RJpay};\n}",
"outputs": 1,
"noerr": 0,
"x": 870,
"y": 420,
"wires": [
[
"6d5bcc4c.efd854",
"c2fcb0e4.9df3c"
]
]
},
{
"id": "4652684e.bd8e48",
"type": "inject",
"z": "5c322bcd.0d7e24",
"name": "",
"topic": "spojka",
"payload": "\"20\"",
"payloadType": "json",
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"x": 420,
"y": 800,
"wires": [
[
"c2fcb0e4.9df3c"
]
]
},
{
"id": "875485b.33b0078",
"type": "inject",
"z": "5c322bcd.0d7e24",
"name": "",
"topic": "spojka",
"payload": "\"21\"",
"payloadType": "json",
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"x": 420,
"y": 760,
"wires": [
[
"c2fcb0e4.9df3c"
]
]
},
{
"id": "87c28d94.43529",
"type": "ibmiot out",
"z": "5c322bcd.0d7e24",
"authentication": "boundService",
"apiKey": "",
"outputType": "cmd",
"deviceId": "ios_i",
"deviceType": "ios_t",
"eventCommandType": "suradnicemotor",
"format": "json",
"data": "{}",
"qos": 0,
"name": "IBM IoT",
"service": "registered",
"x": 1320,
"y": 180,
"wires": []
},
{
"id": "2887474f.3903a8",
"type": "function",
"z": "5c322bcd.0d7e24",
"name": "suradnicemotor",
"func": "switch (msg.topic){\n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/suradnicemotor/fmt/json\":\n return {payload:msg.payload};\n}",
"outputs": 1,
"noerr": 0,
"x": 1120,
"y": 180,
"wires": [
[
"3c596726.fd9b38",
"87c28d94.43529"
]
]
},
{
"id": "3c596726.fd9b38",
"type": "debug",
"z": "5c322bcd.0d7e24",
"name": "",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "false",
"x": 1210,
"y": 520,
"wires": []
},
{
"id": "fe99fbd4.9109b8",
"type": "debug",
"z": "5c322bcd.0d7e24",
"name": "",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "false",
"x": 660,
"y": 40,
"wires": []
},
{
"id": "c334c204.254a9",
"type": "function",
"z": "5c322bcd.0d7e24",
"name": "suradnicenap",
"func": "switch (msg.topic){\n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/suradnicenap/fmt/json\":\n return {payload:msg.payload};\n}",
"outputs": 1,
"noerr": 0,
"x": 1100,
"y": 20,
"wires": [
[
"9b089d4d.b06c5"
]
]
},
{
"id": "9b089d4d.b06c5",
"type": "ibmiot out",
"z": "5c322bcd.0d7e24",
"authentication": "boundService",
"apiKey": "",
"outputType": "cmd",
"deviceId": "ios_i",
"deviceType": "ios_t",
"eventCommandType": "suradnicenap",
"format": "json",
"data": "{}",
"qos": 0,
"name": "IBM IoT",
"service": "registered",
"x": 1320,
"y": 80,
"wires": []
},
{
"id": "15ac389c.0aeb97",
"type": "ibmiot out",
"z": "5c322bcd.0d7e24",
"authentication": "boundService",
"apiKey": "",
"outputType": "cmd",
"deviceId": "ios_i",
"deviceType": "ios_t",
"eventCommandType": "surarychl",
"format": "json",
"data": "{}",
"qos": 0,
"name": "IBM IoT",
"service": "registered",
"x": 1320,
"y": 340,
"wires": []
},
{
"id": "a11eb45f.d38ef8",
"type": "function",
"z": "5c322bcd.0d7e24",
"name": "surarychl",
"func": "switch (msg.topic){\n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/surarychl/fmt/json\":\n return {payload:msg.payload};\n}",
"outputs": 1,
"noerr": 0,
"x": 1120,
"y": 340,
"wires": [
[
"15ac389c.0aeb97"
]
]
},
{
"id": "9d5ef054.3aeed",
"type": "function",
"z": "5c322bcd.0d7e24",
"name": "suraotac",
"func": "switch (msg.topic){\n case \"iot-2/type/Mikrokontroler/id/IDkontroler/evt/suraotac/fmt/json\":\n return {payload:msg.payload};\n}",
"outputs": 1,
"noerr": 0,
"x": 1120,
"y": 400,
"wires": [
[
"5a0f36cd.44ca48"
]
]
},
{
"id": "5a0f36cd.44ca48",
"type": "ibmiot out",
"z": "5c322bcd.0d7e24",
"authentication": "boundService",
"apiKey": "",
"outputType": "cmd",
"deviceId": "ios_i",
"deviceType": "ios_t",
"eventCommandType": "suraotac",
"format": "json",
"data": "{}",
"qos": 0,
"name": "IBM IoT",
"service": "registered",
"x": 1320,
"y": 400,
"wires": []
},
{
"id": "91e819d.952aee8",
"type": "debug",
"z": "5c322bcd.0d7e24",
"name": "",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "payload",
"targetType": "msg",
"x": 200,
"y": 820,
"wires": []
},
{
"id": "4bf77032.81e66",
"type": "ui_button",
"z": "5c322bcd.0d7e24",
"name": "",
"group": "7b6ef1b8.16383",
"order": 2,
"width": "6",
"height": "4",
"passthru": false,
"label": "RESTART",
"tooltip": "",
"color": "",
"bgcolor": "",
"icon": "",
"payload": "\"8\"",
"payloadType": "json",
"topic": "spojka",
"x": 110,
"y": 420,
"wires": [
[
"7ed3d7b9.a233a8",
"c2fcb0e4.9df3c"
]
]
},
{
"id": "67f5864a.d0b778",
"type": "inject",
"z": "5c322bcd.0d7e24",
"name": "",
"topic": "spojka",
"payload": "\"19\"",
"payloadType": "json",
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"x": 660,
"y": 840,
"wires": [
[
"c2fcb0e4.9df3c"
]
]
},
{
"id": "b15ee046.8c935",
"type": "ui_group",
"z": "",
"name": "1",
"tab": "92efbb56.641408",
"order": 1,
"disp": false,
"width": "6",
"collapse": false
},
{
"id": "f7606a4e.234618",
"type": "ui_group",
"z": "",
"name": "3",
"tab": "92efbb56.641408",
"order": 5,
"disp": false,
"width": "6",
"collapse": false
},
{
"id": "f943ae3.4d5b75",
"type": "ui_group",
"z": "",
"name": "4",
"tab": "92efbb56.641408",
"order": 6,
"disp": false,
"width": "6",
"collapse": false
},
{
"id": "b3c559b3.3e97d8",
"type": "ui_group",
"z": "",
"name": "2",
"tab": "92efbb56.641408",
"order": 2,
"disp": false,
"width": "6",
"collapse": false
},
{
"id": "34ec3061.6e984",
"type": "ui_group",
"z": "",
"name": "5",
"tab": "92efbb56.641408",
"order": 4,
"disp": false,
"width": "6",
"collapse": false
},
{
"id": "3fc295fe.9f49ca",
"type": "ui_group",
"z": "",
"name": "6",
"tab": "92efbb56.641408",
"order": 3,
"disp": false,
"width": "6",
"collapse": false
},
{
"id": "3621392d.b91016",
"type": "ui_group",
"z": "",
"name": "7",
"tab": "92efbb56.641408",
"order": 7,
"disp": false,
"width": "6",
"collapse": false
},
{
"id": "7b6ef1b8.16383",
"type": "ui_group",
"z": "",
"name": "8",
"tab": "92efbb56.641408",
"order": 8,
"disp": false,
"width": "6",
"collapse": false
},
{
"id": "6f469820.86dbc8",
"type": "ui_group",
"z": "",
"name": "Group 1",
"tab": "95159b00.fda818",
"order": 1,
"disp": false,
"width": "6",
"collapse": false
},
{
"id": "c5be57a5.510478",
"type": "ui_group",
"z": "",
"name": "Group 2",
"tab": "95159b00.fda818",
"order": 2,
"disp": false,
"width": "6",
"collapse": false
},
{
"id": "5030d833.9eefd8",
"type": "ui_group",
"z": "",
"name": "Group 3",
"tab": "95159b00.fda818",
"order": 3,
"disp": false,
"width": "6",
"collapse": false
},
{
"id": "be34be57.b6c16",
"type": "ui_group",
"z": "",
"name": "Group 4",
"tab": "95159b00.fda818",
"order": 4,
"disp": false,
"width": "6",
"collapse": false
},
{
"id": "9e83fd0.ce74c",
"type": "ui_group",
"z": "",
"name": "Group 5",
"tab": "95159b00.fda818",
"order": 5,
"disp": false,
"width": "6",
"collapse": false
},
{
"id": "2c1d9538.5680ea",
"type": "ui_group",
"z": "",
"name": "Group 6",
"tab": "95159b00.fda818",
"order": 6,
"disp": false,
"width": "6",
"collapse": false
},
{
"id": "a006a90c.461b58",
"type": "ui_group",
"z": "",
"name": "Group 7",
"tab": "95159b00.fda818",
"order": 7,
"disp": false,
"width": "6",
"collapse": false
},
{
"id": "92efbb56.641408",
"type": "ui_tab",
"z": "",
"name": "STATICKE TESTY",
"icon": "dashboard",
"order": 1,
"disabled": false,
"hidden": false
},
{
"id": "95159b00.fda818",
"type": "ui_tab",
"z": "",
"name": "DYNAMICKE TESTY",
"icon": "dashboard",
"order": 2,
"disabled": false,
"hidden": false
}
]
//
// ContentView.swift
// RingViewRPM
//
// Created by Kardan on 01/04/2020.
// Copyright © 2020 Kardan. All rights reserved.
//
import SwiftUI
import CocoaMQTT
public struct DarkView<Content> : View where Content : View {
var darkContent: Content
var on: Bool
public init(_ on: Bool, @ViewBuilder content: () -> Content) {
self.darkContent = content()
self.on = on
}
public var body: some View {
ZStack {
if on {
Spacer()
.frame(minWidth: 0, maxWidth: .infinity, minHeight: 0, maxHeight: .infinity)
.background(Color.black)
.edgesIgnoringSafeArea(.all)
darkContent.frame(minWidth: 0, maxWidth: .infinity, minHeight: 0, maxHeight: .infinity).background(Color.black).colorScheme(.dark)
} else {
darkContent
}
}
}
}
extension View {
public func darkModeFix(_ on: Bool = true) -> DarkView<Self> {
DarkView(on) {
self
}
}
}
struct ContentView: View {
let mqttClient = CocoaMQTT(clientID:"d:ORGID:ios_t:ios_i",host:"ORGID.messaging.internetofthings.ibmcloud.com",port: 1883)
var hodnota10:String="{\"properta\":10}"
var hodnota8:String="{\"properta\":8}"
var hodnota7:String="{\"properta\":7}"
@State var starahodnota:Double=5.55
@State var nazvik="Vozidlo"
@State var counter=""
@State var nrdlzka:Double = 40.9{
didSet{
starahodnota=oldValue
}
}
@State var nrsirka:Double = 15.5890
@State var cgCislo:CGFloat = 0
@State var cNapatie:CGFloat = 0
@State var cRychlost:CGFloat = 0
@State var cOtacky:CGFloat = 0
@State var cZataz:CGFloat = 0
@State var cSanie:CGFloat = 0
var body: some View {
ZStack {
VStack {
HStack {
Button(action: {
self.mqttClient.username="use-token-auth"
self.mqttClient.password="ios_token"
self.mqttClient.connect()
self.counter="Pripojene"
}) {
Image(systemName: "person.circle")
.font(Font.system(.largeTitle).bold())
}
.padding()
Spacer()
Button(action: {
self.mqttClient.publish("iot-2/evt/ahoj/fmt/json", withString: "{\"RJpay\":\"20\"}")
self.mqttClient.subscribe("iot-2/cmd/suradnicemotor/fmt/json")
self.mqttClient.didReceiveMessage = { mqtt, message, id in
print("Message received in topic \(message.topic) with payload \(message.string!)")
if (message.topic=="iot-2/cmd/suradnicemotor/fmt/json"){
let dorucene:String=message.string!
let sevas=dorucene.data(using: .utf8)!
let dekodovac = JSONDecoder()
let osobka = try! dekodovac.decode(Hodnota.self, from: sevas)
let prevteplota=String(osobka.Teplota)
self.nrdlzka=osobka.Latituda
self.nrsirka=osobka.Longituda
self.cgCislo = CGFloat((prevteplota as NSString).doubleValue)
}
}
}) {
Image(systemName: "thermometer")
.font(Font.system(.largeTitle).bold())
}
.padding()
Spacer()
Button(action: {
self.mqttClient.publish("iot-2/evt/ahoj/fmt/json", withString: "{\"RJpay\":\"21\"}")
self.mqttClient.subscribe("iot-2/cmd/suradnicenap/fmt/json")
self.mqttClient.didReceiveMessage = { mqtt, message, id in
print("Message received in topic \(message.topic) with payload \(message.string!)")
if (message.topic=="iot-2/cmd/suradnicenap/fmt/json"){
let dorucene:String=message.string!
let sevas=dorucene.data(using: .utf8)!
let dekodovac = JSONDecoder()
let osobka = try! dekodovac.decode(Hodnota3.self, from: sevas)
let prevteplota=String(osobka.Napatie)
self.nrdlzka=osobka.Latituda
self.nrsirka=osobka.Longituda
self.cNapatie = CGFloat((prevteplota as NSString).doubleValue)
}
}
}) {
Image(systemName: "battery.100")
.font(Font.system(.largeTitle).bold())
}
.padding()
Spacer()
Button(action: {
self.mqttClient.publish("iot-2/evt/ahoj/fmt/json", withString: "{\"RJpay\":\"22\"}")
self.mqttClient.subscribe("iot-2/cmd/surarychl/fmt/json")
self.mqttClient.didReceiveMessage = { mqtt, message, id in
print("Message received in topic \(message.topic) with payload \(message.string!)")
if (message.topic=="iot-2/cmd/surarychl/fmt/json"){
let dorucene:String=message.string!
let sevas=dorucene.data(using: .utf8)!
let dekodovac = JSONDecoder()
let osobka = try! dekodovac.decode(Hodnota1.self, from: sevas)
let prevteplota=String(osobka.Rychlost)
self.nrdlzka=osobka.Latituda
self.nrsirka=osobka.Longituda
self.cRychlost = CGFloat((prevteplota as NSString).doubleValue)
}
}
}) {
Image(systemName: "speedometer")
.font(Font.system(.largeTitle).bold())
}
.padding()
Spacer()
Button(action: {
self.mqttClient.publish("iot-2/evt/ahoj/fmt/json", withString: "{\"RJpay\":\"23\"}")
self.mqttClient.subscribe("iot-2/cmd/suraotac/fmt/json")
self.mqttClient.didReceiveMessage = { mqtt, message, id in
print("Message received in topic \(message.topic) with payload \(message.string!)")
if (message.topic=="iot-2/cmd/suraotac/fmt/json"){
let dorucene:String=message.string!
let sevas=dorucene.data(using: .utf8)!
let dekodovac = JSONDecoder()
let osobka = try! dekodovac.decode(Hodnota2.self, from: sevas)
let prevteplota=String(osobka.Otacky)
self.nrdlzka=osobka.Latituda
self.nrsirka=osobka.Longituda
self.cOtacky = CGFloat((prevteplota as NSString).doubleValue)
}
}
}) {
Image(systemName: "arrow.2.circlepath.circle")
.font(Font.system(.largeTitle).bold())
}
.padding()
}
Spacer()
}
VStack {
MapView(predtym: starahodnota, nazov: nazvik, dlzka: nrdlzka, sirka: nrsirka)
.cornerRadius(25)
.frame(height:300)
.padding(.top,50)
.padding()
Spacer()
ZStack{
//Teplota(hodnotka: cgCislo)
ScrollView(.horizontal, showsIndicators: false){
HStack(spacing:5){
Teplota(hodnotka: cgCislo)
Napatie(napaticko: cNapatie)
Rychlost(rychlostka: cRychlost)
Otacky(otacocky: cOtacky)
Zataz(zatazka: cZataz)
Sanie(sanicko: cSanie)
}
}
}
}
}
}
}
struct ContentView_Previews: PreviewProvider {
static var previews: some View {
ContentView()
.darkModeFix()
//.environment(\.colorScheme, .dark)
}
}
struct Hodnota: Decodable{
var Longituda:Double
var Latituda:Double
var Teplota:Int
}
struct Hodnota1: Decodable{
var Longituda:Double
var Latituda:Double
var Rychlost:Int
}
struct Hodnota2: Decodable{
var Longituda:Double
var Latituda:Double
var Otacky:Int
}
struct Hodnota3: Decodable{
var Longituda:Double
var Latituda:Double
var Napatie:Int
}
//
// MapView.swift
// RingViewRPM
//
// Created by Kardan on 01/04/2020.
// Copyright © 2020 Kardan. All rights reserved.
//
import SwiftUI
import MapKit
struct MapView: UIViewRepresentable {
var predtym:Double
var nazov:String="sevas"
var dlzka = 34.011286
var sirka = -116.166868
@State var prava:Bool=true
func makeUIView(context: Context) -> MKMapView {
MKMapView(frame: .zero)
}
func updateUIView(_ uiView: MKMapView, context: Context) {
let coordinate = CLLocationCoordinate2D(
latitude: dlzka, longitude: sirka)
let sponka=MKPointAnnotation()
sponka.coordinate=coordinate
sponka.title=nazov
let span = MKCoordinateSpan(latitudeDelta: 0.01, longitudeDelta: 0.01)
let region = MKCoordinateRegion(center: coordinate, span: span)
uiView.setRegion(region, animated: true)
let annotations = uiView.annotations
uiView.removeAnnotations(annotations)
uiView.addAnnotation(sponka)
}
}
//
// Teplota.swift
// RingViewRPM
//
// Created by Kardan on 19/04/2020.
// Copyright © 2020 Kardan. All rights reserved.
//
import SwiftUI
struct Teplota: View {
@State var rozhodni=0
var hodnotka:CGFloat = 0
var body: some View {
ZStack{
Text("Teplota motora")
.font(.largeTitle)
.fontWeight(.semibold)
.foregroundColor(Color.yellow)
.multilineTextAlignment(.center)
.padding(.top,200)
Circle()
.trim(from: 0.0, to: 0.5)
.stroke(Color.blue, style: StrokeStyle(lineWidth: 12.0, dash: [8]))
.frame(width: 400, height: 300)
.rotationEffect(Angle(degrees: -180))
Circle()
.trim(from: 0.0, to: hodnotka/200)
.stroke(Color.blue, lineWidth: 12.0)
.frame(width: 400, height: 300)
.rotationEffect(Angle(degrees: -180))
.animation(.easeOut(duration: 0.5))
Text("\(Int(hodnotka)) °")
.font(.largeTitle)
.fontWeight(.semibold)
.multilineTextAlignment(.center)
.padding()
.transition(.opacity)
}
.padding(.top)
}
}
//
// Napatie.swift
// RingViewRPM
//
// Created by Kardan on 19/04/2020.
// Copyright © 2020 Kardan. All rights reserved.
//
import SwiftUI
struct Napatie: View {
var napaticko:CGFloat = 0
var body: some View {
ZStack{
Text("Napatie baterie")
.font(.largeTitle)
.fontWeight(.semibold)
.foregroundColor(Color.yellow)
.multilineTextAlignment(.center)
.padding(.top,200)
Circle()
.trim(from: 0.0, to: 0.5)
.stroke(Color.blue, style: StrokeStyle(lineWidth: 12.0, dash: [8]))
.frame(width: 400, height: 300)
.rotationEffect(Angle(degrees: -180))
Circle()
.trim(from: 0.0, to: napaticko/30)
.stroke(Color.blue, lineWidth: 12.0)
.frame(width: 400, height: 300)
.rotationEffect(Angle(degrees: -180))
.animation(.easeOut(duration: 0.5))
Text("\(Int(napaticko)) V")
.font(.largeTitle)
.fontWeight(.semibold)
.multilineTextAlignment(.center)
.padding()
.transition(.opacity)
}
.padding(.top)
}
}
//
// Rychlost.swift
// RingViewRPM
//
// Created by Kardan on 19/04/2020.
// Copyright © 2020 Kardan. All rights reserved.
//
import SwiftUI
struct Rychlost: View {
var rychlostka:CGFloat = 0
var body: some View {
ZStack{
Text("Rychlost")
.font(.largeTitle)
.fontWeight(.semibold)
.foregroundColor(Color.yellow)
.multilineTextAlignment(.center)
.padding(.top,200)
Circle()
.trim(from: 0.0, to: 0.5)
.stroke(Color.blue, style: StrokeStyle(lineWidth: 12.0, dash: [8]))
.frame(width: 400, height: 300)
.rotationEffect(Angle(degrees: -180))
Circle()
.trim(from: 0.0, to: rychlostka/500)
.stroke(Color.blue, lineWidth: 12.0)
.frame(width: 400, height: 300)
.rotationEffect(Angle(degrees: -180))
.animation(.easeOut(duration: 0.5))
Text("\(Int(rychlostka)) km/h")
.font(.largeTitle)
.fontWeight(.semibold)
.multilineTextAlignment(.center)
.padding()
.transition(.opacity)
}
.padding(.top)
}
}
//
// Otacky.swift
// RingViewRPM
//
// Created by Kardan on 19/04/2020.
// Copyright © 2020 Kardan. All rights reserved.
//
import SwiftUI
struct Otacky: View {
var otacocky:CGFloat = 0
var body: some View {
ZStack{
Text("Otacky")
.font(.largeTitle)
.fontWeight(.semibold)
.foregroundColor(Color.yellow)
.multilineTextAlignment(.center)
.padding(.top,200)
Circle()
.trim(from: 0.0, to: 0.5)
.stroke(Color.blue, style: StrokeStyle(lineWidth: 12.0, dash: [8]))
.frame(width: 400, height: 300)
.rotationEffect(Angle(degrees: -180))
Circle()
.trim(from: 0.0, to: otacocky/16000)
.stroke(Color.blue, lineWidth: 12.0)
.frame(width: 400, height: 300)
.rotationEffect(Angle(degrees: -180))
.animation(.easeOut(duration: 0.5))
Text("\(Int(otacocky)) RPM")
.font(.largeTitle)
.fontWeight(.semibold)
.multilineTextAlignment(.center)
.padding()
.transition(.opacity)
}
.padding(.top)
}
}




{kind=link}
Comments
Please log in or sign up to comment.