


Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
| ||||||
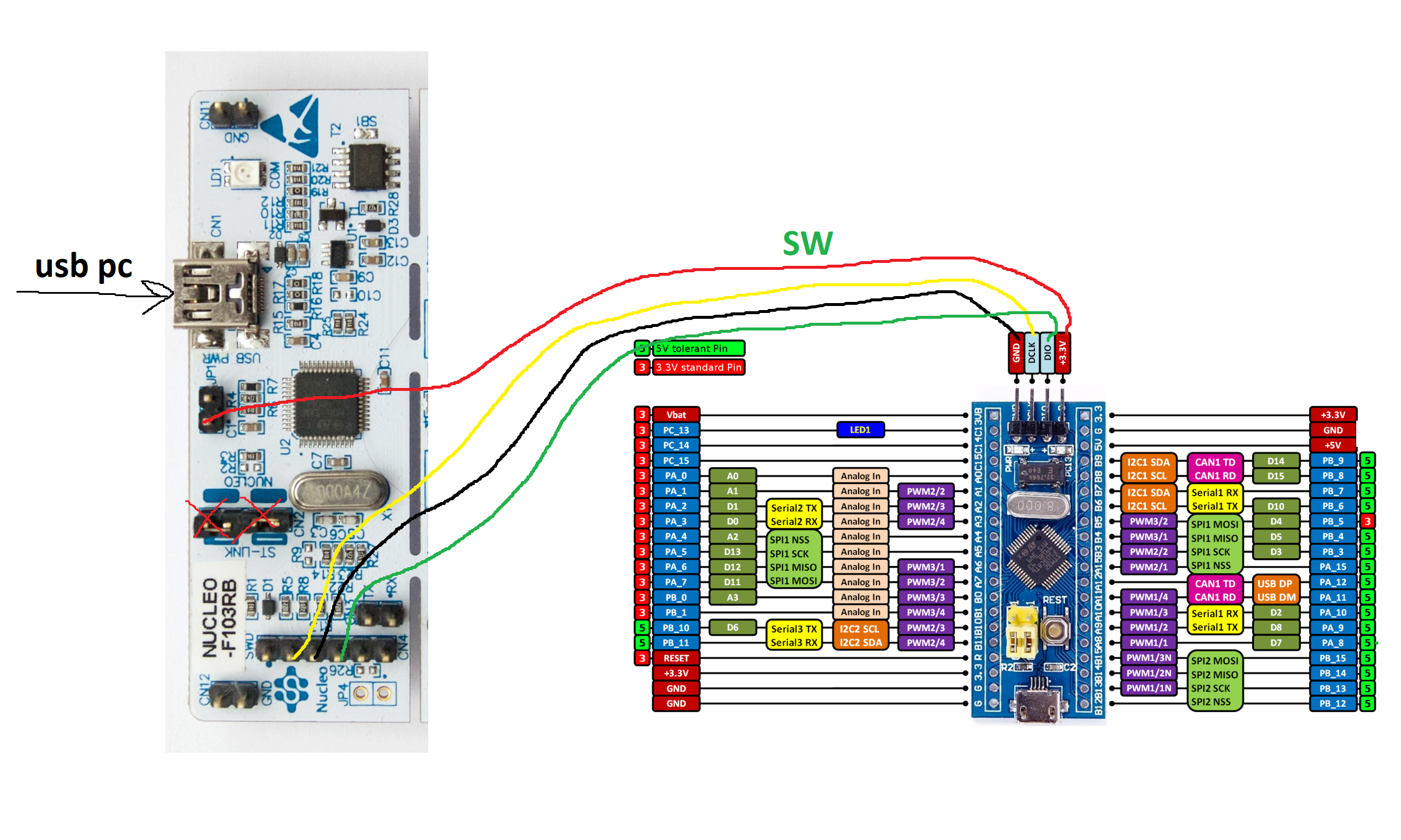
I was forced to implement a SOFTPWM because we designed the PCBs with the wrong pinout, :_D
As pointed out by Nasse in the coments, the DMA peripheral sometimes cannot directly reach the GPIO peripheral, so in those cases (stm32g0 family for example) this tutorial wont work.
The interesting thing about GPIOs, the BSRR register!!
Every GPIOA, GPIOB, GPIOC.... has one of this BSRR registers, if you write the correct bit the corresponding GPIO pin will be set or reset. (this is fast and convenient)
Direct memory access, this is a very powerfull (yet feared by many) peripheral.
Takes data from one place and moves it to other place (while the processor is busy doing other processor stuff).
It only needs a timer trigger event and source/destination addresses.We need to make sure the DMA channel we want to use can reach the memory source/destination we set. In my case STM32f103c8tx there is only one DMA and has access to everything.
First I set all GPIOA, B, C pins as outputs (and the Software SW debugging pins)I tested HSI and HSE clocks, im going for the 8Mhz xtal clock source because allows me to run the micro at 72Mhz(trough PLL)
Now we find out which timers have a DMA channel with the option of being triggered by Update event.TIM1, 2, 4 are good candidates
In our case, the DMA will access a circular buffer in sram memory and move a word of data (4 bytes) to the corresponding GPIO peripheral.
The DMAs will run trough the buffers copying each uint32_t in its corresponding GPIOx->BSRR effectively changing every gpio ouput.
//I want my PWM to have 100 different duty steps, so i need a sram buffer those duty steps long.
/* USER CODE BEGIN PV */
uint32_t dataA[lengthSoftPWMbuffer];
uint32_t dataB[lengthSoftPWMbuffer];
uint32_t dataC[lengthSoftPWMbuffer];
/* USER CODE END PV */At the same time we could use this function to set our softPWM duty.Remember this works by setting a gpio pin (writting in the lower 16bits of the BSRR) or reseting a gpio pin (writting in the upper 16bits of the BSRR)
void setSoftPWM(uint16_t pin, uint32_t duty ,uint32_t *softpwmbuffer){
for (uint32_t i = 0; i < lengthSoftPWMbuffer; ++ i) {
if(i<duty){//set pin
softpwmbuffer[i]&=(uint32_t)~(pin<<16);
softpwmbuffer[i]|=(uint32_t)pin;
}else{//reset pin
softpwmbuffer[i]&=(uint32_t)~(pin);
softpwmbuffer[i]|=(uint32_t)pin<<16;
}
}
}Now we start all the peripherals
/* USER CODE BEGIN 2 */
//start the timers
HAL_TIM_Base_Start(&htim1);
HAL_TIM_Base_Start(&htim2);
HAL_TIM_Base_Start(&htim4);
//configure DMAs
HAL_DMA_Start(&hdma_tim1_up, (uint32_t)&(dataA[0]), (uint32_t)&(GPIOA->BSRR), sizeof(dataA)/sizeof(dataA[0]));
HAL_DMA_Start(&hdma_tim2_up, (uint32_t)&(dataB[0]), (uint32_t)&(GPIOB->BSRR), sizeof(dataB)/sizeof(dataB[0]));
HAL_DMA_Start(&hdma_tim4_up, (uint32_t)&(dataC[0]), (uint32_t)&(GPIOC->BSRR), sizeof(dataC)/sizeof(dataC[0]));
//start DMAs
__HAL_TIM_ENABLE_DMA(&htim1, TIM_DMA_UPDATE);
__HAL_TIM_ENABLE_DMA(&htim2, TIM_DMA_UPDATE);
__HAL_TIM_ENABLE_DMA(&htim4, TIM_DMA_UPDATE);
//ill use o as a main variable for this tutorial
uint32_t o=0;
//im afraid of SRAMs not being initialised to 0
zeroSoftPWM(dataA);
zeroSoftPWM(dataB);
zeroSoftPWM(dataC);
/* USER CODE END 2 */To set a specific pwm value we use: setSoftPWM(uint16_t pin, uint32_t duty, uint32_t *softpwmbuffer)Pin is the gpio pin index inside the GPIO bankDuty is the 0-100 dutycycle to be set.softpwmbuffer is the pointer to the array storing all the BSRR values.
setSoftPWM(GPIO_PIN_9, o, &dataA);if we want to use the 33 pins available:
/* USER CODE BEGIN 3 */
//GPIO bank A
setSoftPWM(GPIO_PIN_0, o, (uint32_t*)&dataA);
setSoftPWM(GPIO_PIN_1, o, (uint32_t*)&dataA);
setSoftPWM(GPIO_PIN_2, o, (uint32_t*)&dataA);
setSoftPWM(GPIO_PIN_3, o, (uint32_t*)&dataA);
setSoftPWM(GPIO_PIN_4, o, (uint32_t*)&dataA);
setSoftPWM(GPIO_PIN_5, o, (uint32_t*)&dataA);
setSoftPWM(GPIO_PIN_6, o, (uint32_t*)&dataA);
setSoftPWM(GPIO_PIN_7, o, (uint32_t*)&dataA);
setSoftPWM(GPIO_PIN_8, o, (uint32_t*)&dataA);
setSoftPWM(GPIO_PIN_9, o, (uint32_t*)&dataA);
setSoftPWM(GPIO_PIN_10, o, (uint32_t*)&dataA);
setSoftPWM(GPIO_PIN_11, o, (uint32_t*)&dataA);
setSoftPWM(GPIO_PIN_12, o, (uint32_t*)&dataA);
setSoftPWM(GPIO_PIN_15, o, (uint32_t*)&dataA);
//GPIO bank B
setSoftPWM(GPIO_PIN_0, o, (uint32_t*)&dataB);
setSoftPWM(GPIO_PIN_1, o, (uint32_t*)&dataB);
setSoftPWM(GPIO_PIN_2, o, (uint32_t*)&dataB);
setSoftPWM(GPIO_PIN_3, o, (uint32_t*)&dataB);
setSoftPWM(GPIO_PIN_4, o, (uint32_t*)&dataB);
setSoftPWM(GPIO_PIN_5, o, (uint32_t*)&dataB);
setSoftPWM(GPIO_PIN_6, o, (uint32_t*)&dataB);
setSoftPWM(GPIO_PIN_7, o, (uint32_t*)&dataB);
setSoftPWM(GPIO_PIN_8, o, (uint32_t*)&dataB);
setSoftPWM(GPIO_PIN_9, o, (uint32_t*)&dataB);
setSoftPWM(GPIO_PIN_10, o, (uint32_t*)&dataB);
setSoftPWM(GPIO_PIN_11, o, (uint32_t*)&dataB);
setSoftPWM(GPIO_PIN_12, o, (uint32_t*)&dataB);
setSoftPWM(GPIO_PIN_13, o, (uint32_t*)&dataB);
setSoftPWM(GPIO_PIN_14, o, (uint32_t*)&dataB);
setSoftPWM(GPIO_PIN_15, o, (uint32_t*)&dataB);
//GPIO bank C
setSoftPWM(GPIO_PIN_13, o, (uint32_t*)&dataC);
setSoftPWM(GPIO_PIN_14, o, (uint32_t*)&dataC);
setSoftPWM(GPIO_PIN_15, o, (uint32_t*)&dataC);
//thats it 33 PWM pins looping 0-100 duty cycle yeeey
o++;
if(o>100){
o=0;
}
}
/* USER CODE END 3 */I tested with different Clock and timer speeds, I could generate up to a 47kHZ pwm with 100 steps before I see a bit of jitter.
- My open question in st-community
- This guy explains the issue in a very low level in depth way
- Kasper implements soft pwm to be used along arduino c++



{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.