#define BLYNK_PRINT Serial
#include <ESP8266WiFi.h>
#include <BlynkSimpleEsp8266.h>
#include <TinyGPS++.h>
#include <SoftwareSerial.h>
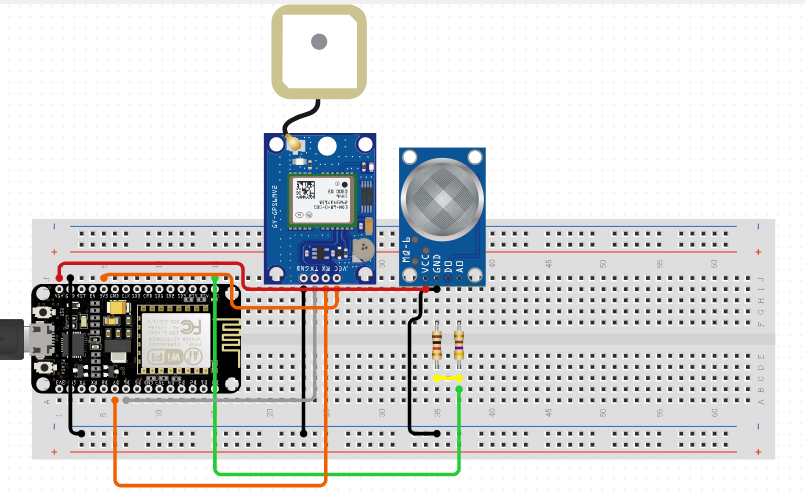
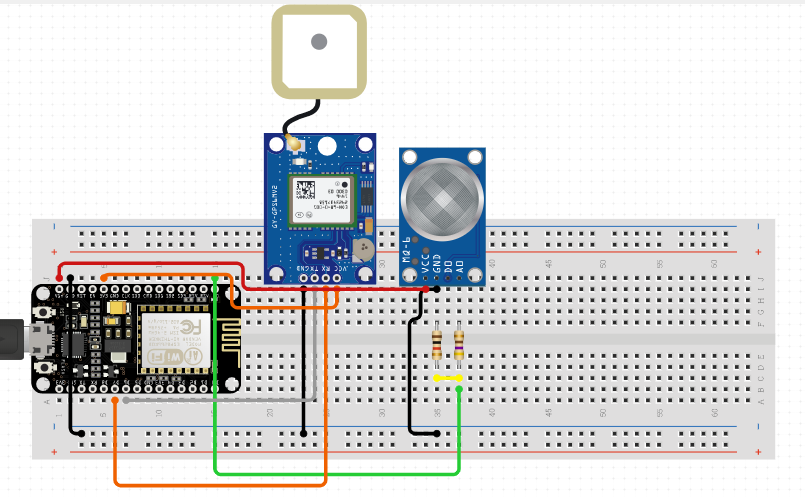
static const int RXPin = 4, TXPin = 5; // GPIO 4=D2(conneect Tx of GPS) and GPIO 5=D1(Connect Rx of GPS
static const uint32_t GPSBaud = 9600;
char auth[] = "authentication key"; //Your Project authentication key
char ssid[] = "wifi id"; // Name of your network (HotSpot or Router name)
char pass[] = "wifi pwd"; // Corresponding Password
TinyGPSPlus gps; // The TinyGPS++ object
WidgetMap myMap(V0);
SoftwareSerial ss(RXPin, TXPin); // The serial connection to the GPS device
BlynkTimer timer;
int gas_value;
int gas_avalue;
float spd; //Variable to store the speed
float sats; //Variable to store no. of satellites response
String bearing;
unsigned int move_index = 1;
void setup()
{
pinMode(16, INPUT);
Serial.begin(9600);
ss.begin(GPSBaud);
Blynk.begin(auth, ssid, pass);
timer.setInterval(5000L, checkGPS);
}
void checkGPS(){
if (gps.charsProcessed() < 10)
{
Serial.println(F("No GPS detected: check wiring."));
//Blynk.virtualWrite(V4, "GPS ERROR"); // Value Display widget on V4 if GPS not detected
}
}
void loop()
{
gas_avalue = digitalRead(D3);
if (gas_avalue < 1)
{
Serial.println("DANGER!!!!");
digitalWrite(D4,HIGH);
Blynk.notify("gas and smoke alert");
}
else
{
Serial.println("NO LEAKAGE");
Blynk.notify("no leakage");
digitalWrite(D4,LOW);
}
delay(100);
while (ss.available() > 0)
{
// sketch displays information every time a new sentence is correctly encoded.
if (gps.encode(ss.read()))
displayInfo();
}
Blynk.run();
timer.run();
}
void displayInfo()
{
if (gps.location.isValid() )
{
float latitude = (gps.location.lat()); //Storing the Lat. and Lon.
float longitude = (gps.location.lng());
Serial.print("LAT: ");
Serial.println(latitude, 6); // float to x decimal places
Serial.print("LONG: ");
Serial.println(longitude, 6);
Blynk.virtualWrite(V1, String(latitude, 6));
Blynk.virtualWrite(V2, String(longitude, 6));
myMap.location(move_index, latitude, longitude, "GPS_Location");
spd = gps.speed.kmph(); //get speed
Blynk.virtualWrite(V3, spd);
sats = gps.satellites.value(); //get number of satellites
Blynk.virtualWrite(V4, sats);
bearing = TinyGPSPlus::cardinal(gps.course.value()); // get the direction
Blynk.virtualWrite(V5, bearing);
}
Serial.println();
}


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)











{kind=link}
{kind=link}
Comments