
Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 2 | |||
| × | 1 | ||||
| × | 2 | ||||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
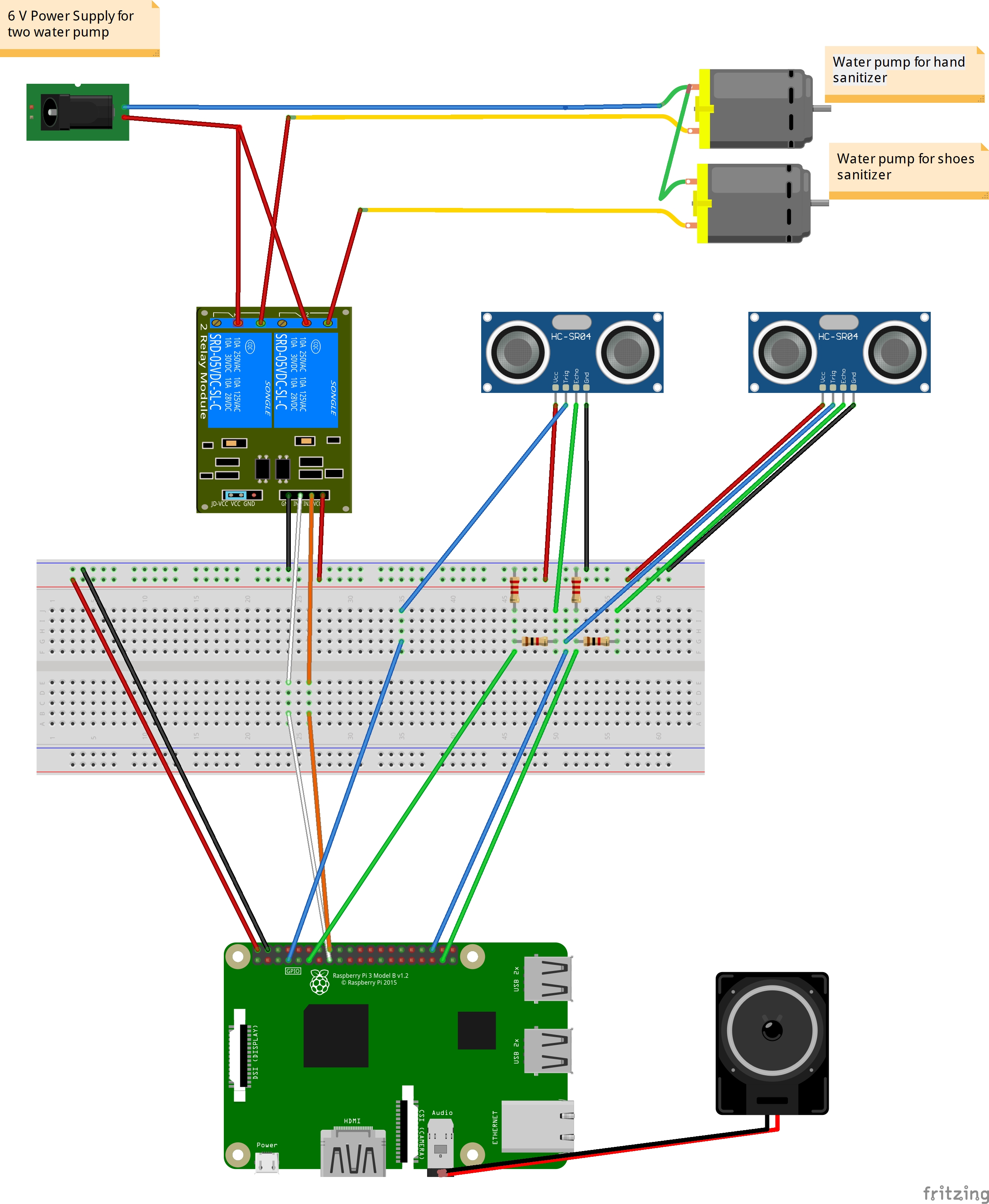
This is the SaniStation prototype with full features. it has the ability to adapt new controls.
When the ambient light is not enough or it is dark, the led lamp turns on automatically so that the face mask detector can work.
Works autonomously, without internet, but has the ability to connect to a smart home control system when internet is available via MQTT
There are several ways that help prevent the spread of COVID-19, some of them are: the use of a suitable mask that prevents breathing air that could be contaminated with virus particles, also objects that are touched with the hands can contain these same particles, like the different places where you walk.In our country, which is from the third world, (El Salvador), most places have chosen to place a person to control the entry of people from outside the place; verifying that they wear a mask on their faces, applying liquid such as alcohol gel on their hands, also applying liquid on their shoes to comply with the rules for admission.
This project aims to help institutions carry out these functions.Sanitizing stations can be used in government buildings, shops, supermarkets, pharmacies, and many more places.The stations work as follows:The person stands in front of the station, then tells him in a voice if he is wearing a mask or not, if he is using it, he tells him that he has to put his hands on the hand sanitization station and applies alcohol gel, later say
"...stop in front of the shoe sanitizing station and applies sanitizing liquid." By completing these three steps, you will be allowed to enter the building.The station has the ability to turn on a LED light if the environment is dark and to better identify the use of the mask. It also has a 24x8 led matrix to display messages.Since items cannot be imported in my country through quarantine, I did not manage to install the sensor (LDR) and the body temperature sensor, which does the reading in the hand sanitizing station and displays the result in the LED matrix.
In this location a non-contact body temperature sensor can be placed, the result will be displayed in the LED matrix.
It is not implemented at this time, because it is impossible for me to obtain that sensor
At this time I do not have access to print a 3D prototype of the hand sanitizer, I have used an old coffee machine
It is necessary to have installed in Raspbian: You can follow the links for installation.
OpenCV 4.X
https://www.pyimagesearch.com/opencv-tutorials-resources-guides/
https://www.pyimagesearch.com/2018/09/19/pip-install-opencv/
TensorFlow
Keras
https://www.pyimagesearch.com/2016/11/14/installing-keras-with-tensorflow-backend/
PicoTTS







{kind=link}
Comments