


Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
This project is my make of Smart Servo Motor Tester with mAmp meter by fellow Hackster Science 3D. This build has a redesigned schematic, PCB, 3D printed case and software. The outward appearance and its operation is similar to the original.
DemonstrationThe STL files required for 3D printing are included. You can either print them yourself if you have access to a 3D printed or take them to a commercial 3D print shop.
The recommend Slicer settings are as follows:
"Case - Bottom V2.stl" - 0.2 layer height, no supports
"Case - Lid V2.stl" - 0.2 layer height, no supports
"Case - Text V2.stl" - 0.2 layer height, no supports, switch to contrasting color at start of layer 4.
"Case - Knobs V2.stl" - 0.1 layer height, no supports, switch to contrasting color at start of layer 140
"Case - Spacers V2.stl" - 0.1 layer height, no supports
Using double sided tape or glue, fix "Case - Text V2.stl" to "Case - Lid V2.stl". Drill out the four PCB mounts using a 2.5mm drill and create a thread using a 3mm tap.
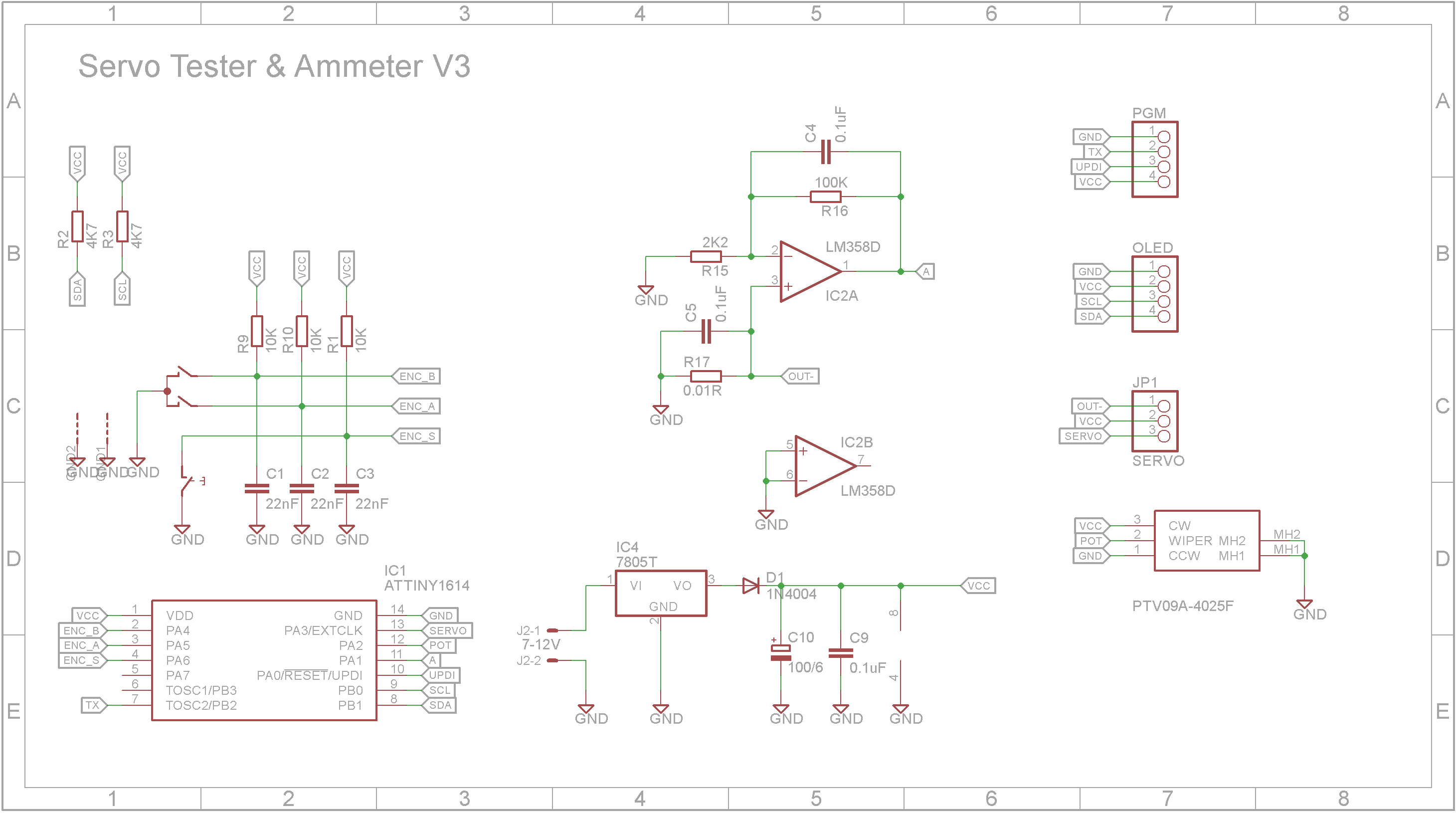
SchematicThe following changes were made to the original design:
- Replaced Arduino Nano with a ATtiny1614 microprocessor
- Added a RC network to de-bounce the rotary encoder contacts and its switch contacts
- Changed the powering of the unit to use a standard power brick rather than the supply voltage from an ESC.
- Replaced the ammeter circuit from using a MAX471 3A to a simple LM358 OP-AMP circuit.
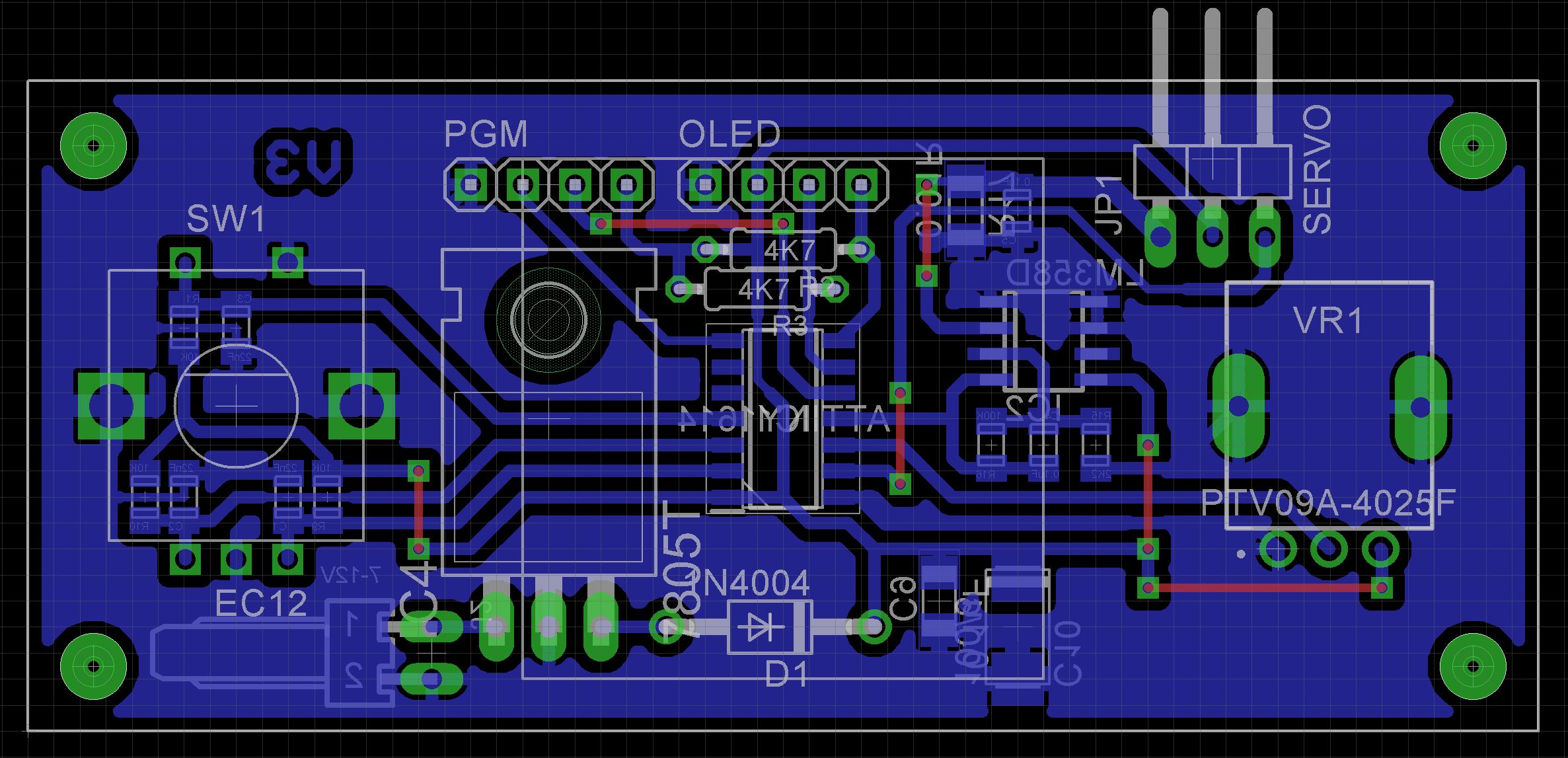
The PCB was designed for parts I already had around the workshop. The board contains a mixture of through hole components and Surface Mount Devices (SMD).
The Eagle files have been included should you wish to have the board commercially made or you can do as I did and make it yourself. I used the Toner method.
NOTE:
0.96in OLED modules can come with the GND and VCC connections reversed. The PCB is designed for the module that has a pin layout of GND, VCC, SCL, SDA.
PCB is designed for OLED module on the left (note the change in position of GND & VCC)
Assembly - Step 1Start by adding the SMD components. I find it easier to use solder paste rather than use solder from a reel when soldering SMD components. I used my SMD Reflow Hot Plate to reflow the solder paste under the SMD components.
Add the links if your board is single-sided.
Add a 4 pin right angle male header to the copper side of the board. This header is only used to program the ATtiny1614.
Add a polarized 2 pin right angle male header to the copper side of the board. This is where the wires from the DC panel socket plug in.
On the component side add the two 4, 700 ohm 1/8W resistors, a 1N5819 1A Schottky diode, a 7805 5V regulator, 3 pin right-angle male header for the servo connection and a 4 pin straight female header for the OLED display module.
3D print "Case - Spacers V2.stl" and super glue them to the PCB as shown below.
Add the rotary encoder with switch and the potentiometer.
Plug in the OLED screen.
Screw the board to the case using four 6mm M4 screws.
You will probably need to trim the shaft of the potentiometer. Place the printed knob on first and measure the extra height that needs to be removed. Remove the knob and cut the measured amount from the end of the shaft with a Dremel rotary tool or similar. Chamfer the edges of the cut so the knob doesn't catch on any rough edges.
Add the DC panel socket and wire up to a 2 pin female polarized plug.
Dab some paint above the servo connector opening to identify the orientation of the servo plug.
Before closing up the case, connect the programmer to the pins and upload the software (see next section). On the picture below I used dabs of paint to help identify what the pins are. Red - 5V, Gray - UPDI, Blue - TX (not used) and black or unpainted is GND.
Unlike the earlier ATtiny series such as the ATtiny85, the ATtiny1614 uses the RESET pin to program the CPU. To program it you need a UPDI programmer. I made one using a Arduino Nano. You can find complete build instructions at Create Your Own UPDI Programmer. It also contains the instructions for adding the megaTinyCore boards to your IDE.
Once the board has been installed in the IDE, select it from the Tools menu.
Select the ATtiny1614 board in your IDE
Select Board, chip, clock speed, COM port the Arduino Nano is connected and the programmer
The Programmer needs to be set to jtag2updi (megaTinyCore).
Open the sketch and upload it to the ATtiny1614.
ConclusionThis is a very useful tool. Maybe the ammeter part is a bit of an overkill (never really had the need for it before) but functionally it contains everything I need when building projects containing servos.
Thanks Science 3D for the inspiration for this project. It has been a rewarding build. 😃




{kind=link}
{kind=link}
Comments