

Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Started as a school project ended up taking me a lot of time.
The code should work totally fine except you may want to change some timings.
The only thing I didn't manage to get done was the steering mechanism it was simply too hard.
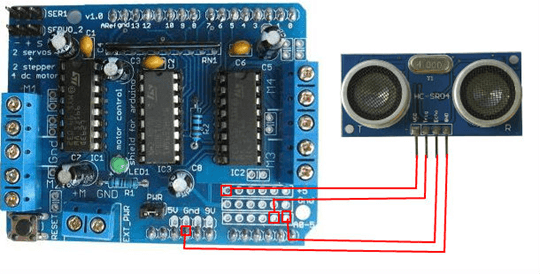
dc motor on motor2 on l293d board.
servo in servo_2





{kind=link}
Comments