

Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
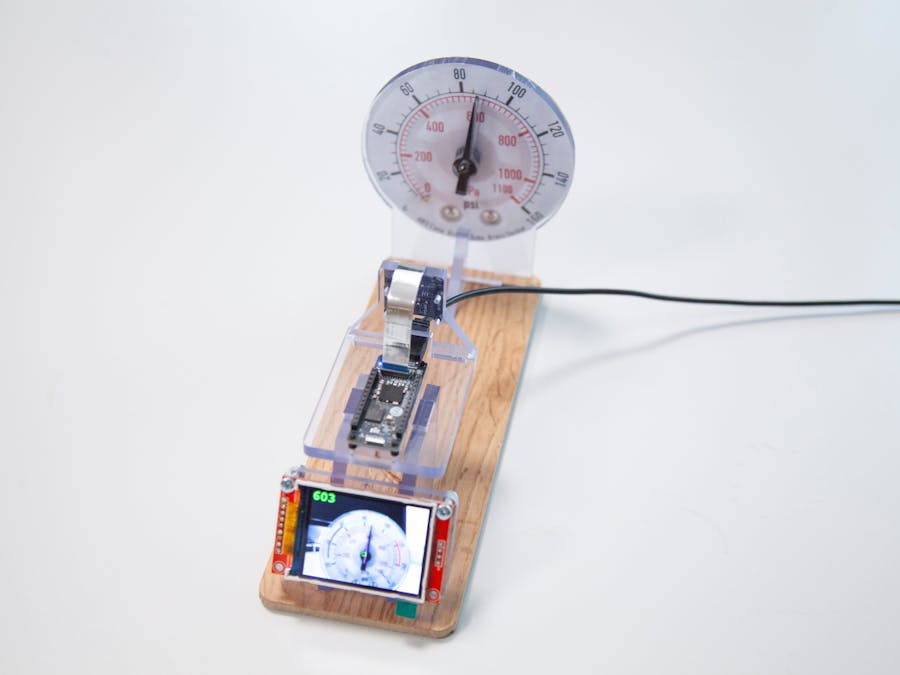
Retrofitting a device that can digitize certain gauges and connect these to a cloud service might potentially prolong the machines useable life span. This might in turn postpone the investment cost of new machine by a few years.
Basic overview of the systemThis project uses Spresense together with the camera to continuously monitor a gauge, in this case a manometer. Image analysis is used to find the needle in the image. Once the needle is found, the angle of the needle is calculated. When the angle is known, a table for mapping angles to gauge values is used to interpolate the actual gauge value. This table consists of more than just two points to get good accuracy over the whole gauge range.
A modified set of ili9341 TFT drivers are being used to get better update performance.
A few words about the method used to detect the gauge needle
To detect the gauge’s needle, a group of rectangular areas are defined around the needle’s rotating point. The place of the needle's rotating point is hard coded. The shape of the group is like the shape of the letter U. Two groups are used, centered around the needle's rotating point but with different offsets.
The image below shows the arrangement of the rectangle groups. The image below is just to demonstrate the idea and is not exact.
The needle detection algorithm starts by parsing through the outer (green) group of rectangles one by one. In the parsing loop each rectangle is parsed by a function that runs a set of convolution kernels through it to filter out anything that doesn't look like a part of the needle. If a pattern that is likely to be a part of the needle is found, the rectangle on the opposite side of the needle's rotating point is scanned too. If the opposite side scan is successful in finding a part of the needle, then the needle is considered as found. Knowing the location of the rectangles and where in the rectangle the needle has been located, the angle of the needle can then easily be calculated using linear algebra.
The source code in this project should be seen as demo code with flaws and will only work under certain circumstances.
HardwareThis demo uses three major components:
- Spresense main board
- Spresense camera
- ILI9341 TFT display
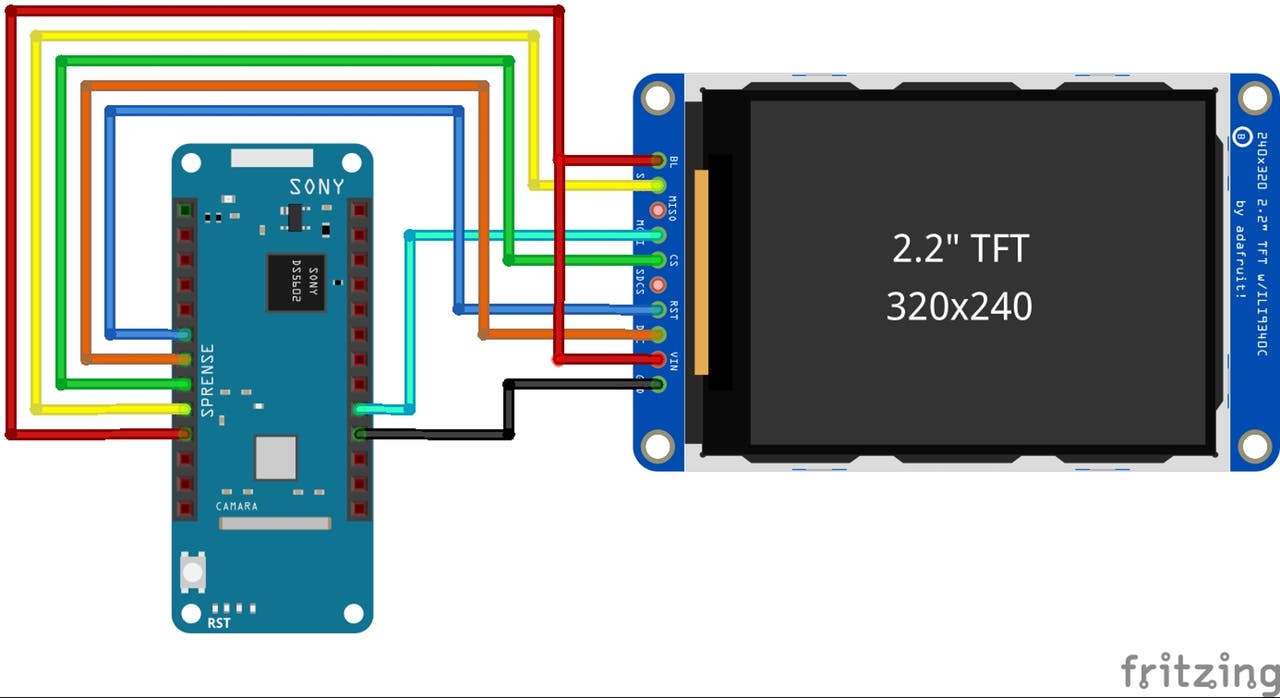
The TFT display could be skipped but is nice to have. If no TFT is used, the serial output could be used to get the converted value. The Arduino IDE has an automatically configured plot window "Serial Plotter" that can be used to plot the value over time. In this version the TFT display is directly connected to the main board but you have the option to connect to the extension board instead.
Additionally, the wiring is different depending if connected to the main or extension board. The SPI bus is also different on the main board header. The main board uses SPI channel #5 and this can be set as the default one by setting
#define CONFIG_CXD56_SPI5In the beginning of the sketch.
SchematicsThe rig drawing has been created using FreeCAD. FreeCAD has been used to both design the CAD and to do CAM. This have later been milled out on a CNC router. A laser cutter should be able to do the same work. This rig is not necessary to create to do this project but since it already have been done, I am sharing it.
This project has been done using the Arduino IDE with Spresense board package added. This should make it very easy to reproduce this setup.
For display drivers a modified set Adafruit’s TFT drivers for ILI 9341 are used.
The main difference between these drivers and the original set is that this version takes the image buffer as a function parameter and then performs all draw and write operations on the buffer before the whole buffer is bulk transferred to the display. The original version would initiate SPI transfer on every single pixel write. Using these modified drivers increase the performance.
The Sketch#define CONFIG_CXD56_SPI5
#include <Camera.h>
#include <SPI.h>
#include "Adafruit_GFX.h"
#include "Adafruit_ILI9341.h"
#include "Fonts/FreeMonoBold18pt7b.h"
#define TFT_RST 26 /* For mainboard */
#define TFT_DC 25
#define TFT_CS 24
Adafruit_ILI9341 tft = Adafruit_ILI9341(TFT_CS , TFT_DC , TFT_RST);
#define BAUDRATE 115200
#define CENTER_X_OFFSET 5
#define CENTER_Y_OFFSET 38
#define IMG_WIDTH 320
#define IMG_HEIGHT 240
#define OFFSET_X IMG_WIDTH/2 - BOX_LARGE_WIDTH /2
#define OFFSET_Y IMG_HEIGHT / 2 - BOX_LARGE_HEIGHT / 2
#define BOX_LARGE_SIDE 120
#define BOX_SIZE 10
#define BOX_LARGE_WIDTH BOX_LARGE_SIDE
#define BOX_LARGE_HEIGHT BOX_LARGE_SIDE
#define BOX_SMALL_SIDE 100
#define BOX_SMALL_WIDTH 100
#define BOX_SMALL_HEIGHT 100
#define BOX_CENTER_WIDTH 5
#define BOX_CENTER_HEIGHT 5
#define SCAN_LINE_PX_WIDTH 3
#define SCAN_LINE_SIDES_N 1
#define BOX_LARGE OFFSET_X, OFFSET_Y, BOX_LARGE_WIDTH, BOX_LARGE_HEIGHT
#define BOX_SMALL OFFSET_X, OFFSET_Y, BOX_SMALL_WIDTH, BOX_SMALL_HEIGHT
#define BOX_CENTER OFFSET_X+BOX_LARGE_WIDTH/2-BOX_CENTER_WIDTH/2, OFFSET_Y + BOX_LARGE_HEIGHT /2-BOX_CENTER_WIDTH/2, BOX_CENTER_WIDTH, BOX_CENTER_HEIGHT
#define SCAN_LENGTH_LARGE 100
#define SCAN_LENGTH_SMALL 55
#define SCAN_LINE_PX_WIDTH 6
#define SCAN_AREA_DISTANCE 50
#define SIDE_LEFT 0
#define SIDE_TOP 1
#define SIDE_RIGHT 2
#define INNER_Y_BASE ((IMG_HEIGHT / 2 + CENTER_Y_OFFSET) + SCAN_AREA_DISTANCE - 30)
#define OUTER_Y_BASE ((IMG_HEIGHT / 2 + CENTER_Y_OFFSET) - SCAN_AREA_DISTANCE)
#define TABLE_SIZE(t) (sizeof(t)/sizeof(t[0]))
typedef struct {
uint16_t x;
uint16_t y;
uint8_t scan_width_px;
uint16_t scan_length;
uint8_t *buf;
} buf_t;
typedef enum {
SCAN_DIRECTION_HORIZONTAL,
SCAN_DIRECTION_DOWN,
SCAN_DIRECTION_UP,
} scan_direction_t;
typedef struct {
uint16_t x;
uint16_t y;
uint8_t scan_width_px;
uint8_t scan_length;
scan_direction_t dir;
} scan_area_t;
typedef struct kern_t {
uint8_t dim_w ;
uint8_t dim_h ;
uint8_t denom;
int8_t kern[SCAN_LINE_PX_WIDTH * SCAN_LINE_PX_WIDTH];
} ;
typedef struct {
int16_t x;
int16_t y;
} px_coord_t;
static kern_t vertical_line_detect = {
.dim_w = SCAN_LINE_PX_WIDTH,
.dim_h = SCAN_LINE_PX_WIDTH,
.denom = 1,
.kern = {
-1, 2, 2, -1,
-1, 2, 2, -1,
-1, 2, 2, -1,
-1, 2, 2, -1,
},
};
#define A 25
static kern_t average = {
.dim_w = 5,
.dim_h = 5,
.denom = 5 * 5 ,
.kern = {
10 , 10 , 10 , 10 , 10 ,
10 , 10 , 10 , 10 , 10 ,
10 , 10 , 10 , 10 , 10 ,
10 , 10 , 10 , 10 , 10 ,
10 , 10 , 10 , 10 , 10 ,
},
};
static kern_t average_1dim = {
.dim_w = 15,
.dim_h = 1,
.denom = 100,
.kern = {
10 , 10 , 10 , 10 , 10 , 10 , 10 , 10 , 10 , 10 , 10 , 10 , 10 , 10 , 10 , 10 , 10 , 10 , 10 , 10 , 10 , 10 , 10 , 10 , 10
},
};
typedef struct {
float input;
uint16_t gauge;
float k;
float m;
} translate_t;
typedef struct {
uint16_t low_bound;
uint16_t high_bound;
uint16_t color;
float low_angle;
float high_angle;
} range_t;
translate_t translate_tbl[] = {
{.input = -40 , .gauge = 20, .k = 0, .m = 0},
{.input = -13 , .gauge = 200, .k = 0, .m = 0},
{.input = 49 , .gauge = 400, .k = 0, .m = 0},
{.input = 91.5 , .gauge = 600, .k = 0, .m = 0},
{.input = 144 , .gauge = 800, .k = 0, .m = 0},
{.input = 190 , .gauge = 1000, .k = 0, .m = 0},
{.input = 216 , .gauge = 1100, .k = 0, .m = 0},
};
static range_t alarms[] = {
{
.low_bound = 200,
.high_bound = 400,
.color = 0x001F,
.low_angle = 0.0,
.high_angle = 130.0,
},
{
.low_bound = 400,
.high_bound = 800,
.color = 0x0EC0,
.low_angle = 0.0,
.high_angle = 0.0,
},
{
.low_bound = 800,
.high_bound = 1000,
.color = 0xF800,
.low_angle = 0.0,
.high_angle = 0.0,
}
};
void tbl_range_init() {
for (uint8_t range = 0; range < TABLE_SIZE(alarms); range++) {
for (uint8_t i = 0; i < TABLE_SIZE(translate_tbl) - 1; i++) {
if (alarms[range].low_bound >= translate_tbl[i].gauge && alarms[range].low_bound < translate_tbl[i + 1].gauge) {
alarms[range].low_angle = (alarms[range].low_bound - translate_tbl[i].m) / translate_tbl[i].k;
}
if (alarms[range].high_bound >= translate_tbl[i].gauge && alarms[range].high_bound < translate_tbl[i + 1].gauge) {
alarms[range].high_angle = (alarms[range].high_bound - translate_tbl[i].m) / translate_tbl[i].k;
}
}
}
}
void tbl_init() {
uint8_t i;
int16_t res = -1;
for (i = 0; i < (TABLE_SIZE(translate_tbl) - 1) ; i++) /* Don't run to the absolute end! */
{
translate_tbl[i].k = (translate_tbl[i + 1].gauge - translate_tbl[i].gauge) / (translate_tbl[i + 1].input - translate_tbl[i].input);
translate_tbl[i].m = (float)translate_tbl[i].gauge - (translate_tbl[i].input * translate_tbl[i].k);
}
return res;
}
int16_t intrapolate(float input) {
uint8_t i;
int16_t res = -1;
if (input < translate_tbl[0].input) {
res = translate_tbl[0].gauge;
} else if (input > translate_tbl[(TABLE_SIZE(translate_tbl) - 1)].input) {
res = translate_tbl[(TABLE_SIZE(translate_tbl) - 1)].gauge;
} else {
for (i = 0; i < (TABLE_SIZE(translate_tbl) - 1) ; i++) /* Don't run to the absolute end! */
{
if (input >= translate_tbl[i].input && input < translate_tbl[i + 1].input) {
res = translate_tbl[i].k * input + translate_tbl[i].m;
}
}
}
return res ;
}
scan_area_t inner_array[] = {
{
.x = IMG_WIDTH / 2 - SCAN_LENGTH_SMALL / 2 + SCAN_LENGTH_SMALL,
.y = INNER_Y_BASE - SCAN_LENGTH_SMALL + SCAN_LINE_PX_WIDTH,
.scan_width_px = SCAN_LINE_PX_WIDTH,
.scan_length = SCAN_LENGTH_SMALL,
.dir = SCAN_DIRECTION_DOWN,
}
,
{
.x = IMG_WIDTH / 2 - SCAN_LENGTH_SMALL / 2,
.y = INNER_Y_BASE ,
.scan_width_px = SCAN_LINE_PX_WIDTH,
.scan_length = SCAN_LENGTH_SMALL,
.dir = SCAN_DIRECTION_HORIZONTAL,
}
,
#if 1
{
.x = IMG_WIDTH / 2 - SCAN_LENGTH_SMALL / 2,
.y = INNER_Y_BASE ,
.scan_width_px = SCAN_LINE_PX_WIDTH,
.scan_length = SCAN_LENGTH_SMALL,
.dir = SCAN_DIRECTION_UP,
}
#endif
};
scan_area_t outer_array[] = {
#if 1
{
.x = IMG_WIDTH / 2 - SCAN_LENGTH_LARGE / 2,
.y = OUTER_Y_BASE + SCAN_LENGTH_LARGE ,
.scan_width_px = SCAN_LINE_PX_WIDTH,
.scan_length = SCAN_LENGTH_LARGE,
.dir = SCAN_DIRECTION_UP,
},
#endif
{
.x = IMG_WIDTH / 2 - SCAN_LENGTH_LARGE / 2,
.y = OUTER_Y_BASE,
.scan_width_px = SCAN_LINE_PX_WIDTH,
.scan_length = SCAN_LENGTH_LARGE,
.dir = SCAN_DIRECTION_HORIZONTAL,
}
,
#if 1
{
.x = IMG_WIDTH / 2 - SCAN_LENGTH_LARGE / 2 + SCAN_LENGTH_LARGE,
.y = OUTER_Y_BASE ,
.scan_width_px = SCAN_LINE_PX_WIDTH,
.scan_length = SCAN_LENGTH_LARGE,
.dir = SCAN_DIRECTION_DOWN,
},
#endif
};
uint8_t opposite_side_table[TABLE_SIZE(outer_array)] {0, 1, 2};
uint8_t outerbuf[SCAN_LENGTH_LARGE * SCAN_LINE_PX_WIDTH ];
uint8_t innerbuf[SCAN_LENGTH_SMALL * SCAN_LINE_PX_WIDTH ];
buf_t Inner = {
.x = 0,
.y = 0,
.scan_width_px = SCAN_LINE_PX_WIDTH,
.scan_length = SCAN_LENGTH_SMALL ,
.buf = innerbuf,
};
buf_t Outer = {
.x = 0,
.y = 0,
.scan_width_px = SCAN_LINE_PX_WIDTH,
.scan_length = SCAN_LENGTH_LARGE ,
.buf = outerbuf,
};
#define B 0x001F
#define G 0x0EC
#define R 0xF800
inline uint16_t grayscale(uint16_t rgb) {
uint8_t r, g, b;
uint16_t res, gray;
g = ((rgb) >> 5) & 0x3F;
b = ((rgb) >> 11) & 0x1F;
gray = ((r + g / 2 + b ) * 10) / 2;
gray = gray / 10 ;
res = (gray << 11) | (gray << 6) | (gray);
return res;
}
int find_max(buf_t *buf)
{
int x, pos = -1;
uint8_t maxi = 0;
for (x = 0; x < buf->scan_length; x++)
{
if (buf->buf[x] > maxi) {
maxi = buf->buf[x] ;
pos = x;
}
}
return pos;
}
void conv(kern_t *k, buf_t *buf, buf_t *out_result) {
uint16_t x, y, kernx, kerny;
uint8_t *avg;
uint16_t divisor = 1;
uint8_t kern_center = k->dim_w / 2;
avg = malloc(buf->scan_length);
out_result->x = 0;
out_result->y = 0;
out_result->scan_width_px = 1;
out_result->scan_length = buf->scan_length;
out_result->buf = avg;
memset(avg, 0, buf->scan_length);
for (y = 0; y < 1; y++) {
for (x = kern_center; x < buf->scan_length - kern_center ; x++) {
uint16_t sum = 0;
for (kerny = 0; kerny < k->dim_h; kerny++) {
for (kernx = 0; kernx < k->dim_w; kernx++) {
sum = sum + (k->kern[kerny * k->dim_w + kernx] * buf->buf[(kernx + x - kern_center) + ((kerny + y) * buf->scan_length)]);
}
}
avg[x] = (uint8_t) (sum / k->denom);
}
}
}
void GetPixels_scan_area(const scan_area_t *scan_area, uint16_t *imgbuf, buf_t *target) {
uint16_t x, y, bufx, bufy;
uint8_t i;
uint16_t target_px;
target_px = 0;
switch (scan_area->dir) {
case SCAN_DIRECTION_HORIZONTAL:
for (y = scan_area->y, bufy = 0; y < scan_area->y + scan_area->scan_width_px; y++, bufy++) {
for (x = scan_area->x, bufx = target_px; x < ( scan_area->x + scan_area->scan_length); x++, bufx++) {
uint16_t gray;
gray = grayscale(imgbuf[x + y * IMG_WIDTH]);
target->buf[bufy * scan_area->scan_length + bufx] = (gray & 0x1F) < 0x08 ? 0x002 : 0x0000;
/* imgbuf[x + y * IMG_WIDTH] = (gray & 0x1F) < 0x08 ? 0xF000 : gray ;*/
}
}
break;
case SCAN_DIRECTION_DOWN:
for (x = scan_area->x, bufy = 0; x < ( scan_area->x + scan_area->scan_width_px); x++, bufy++) {
for (y = scan_area->y, bufx = target_px; y < scan_area->y + scan_area->scan_length; y++, bufx++) {
uint16_t gray;
gray = grayscale(imgbuf[x + y * IMG_WIDTH]);
target->buf[bufy * scan_area->scan_length + bufx] = (gray & 0x1F) < 0x08 ? 0x002 : 0x0000;
/* imgbuf[x + y * IMG_WIDTH] = (gray & 0x1F) < 0x08 ? 0xF00f : gray ; */
}
}
break;
case SCAN_DIRECTION_UP:
for (x = scan_area->x, bufy = 0; x < ( scan_area->x + scan_area->scan_width_px); x++, bufy++) {
for (y = scan_area->y, bufx = target_px; y > scan_area->y - scan_area->scan_length; y--, bufx++) {
uint16_t gray;
gray = grayscale(imgbuf[x + y * IMG_WIDTH]);
target->buf[bufy * scan_area->scan_length + bufx] = (gray & 0x1F) < 0x08 ? 0x002 : 0x0000;
/* mgbuf[x + y * IMG_WIDTH] = (gray & 0x1F) < 0x08 ? 0xF0f0 : gray ; */
}
}
break;
}
}
float getAngle(const px_coord_t *a, const px_coord_t *b)
{
px_coord_t diff;
float angle;
diff.x = b->x - a->x;
diff.y = b->y - a->y;
angle = atanf(((float)diff.y) / diff.x);
angle = angle * 180 / 3.14;
if (diff.x < 0) {
angle = 180 + angle;
}
return angle;
}
static uint8_t frameupdate = 0;
int8_t getCoordfromPos(scan_area_t *scan_area, px_coord_t *out, uint16_t maxpos) {
uint8_t i;
uint16_t area_x;
int8_t ret = -1;
area_x = 0;
if (maxpos >= area_x && maxpos < area_x + scan_area->scan_length)
{
switch (scan_area->dir) {
case SCAN_DIRECTION_HORIZONTAL:
out->x = scan_area->x + (maxpos - area_x);
out->y = scan_area->y;
break;
case SCAN_DIRECTION_DOWN:
out->x = scan_area->x;
out->y = scan_area->y + (maxpos - area_x);
break;
case SCAN_DIRECTION_UP:
out->x = scan_area->x;
out->y = scan_area->y - (maxpos - area_x);
break;
}
ret = 0;
}
return ret;
}
void DrawArc(const px_coord_t *center, uint16_t radius, float angle_start, float angle_end, void *buf, uint8_t thickness, uint16_t color)
{
float a;
float angle_compensated;
int16_t x, y;
uint16_t *img_buf = buf;
/*thickness = 1;*/
for (a = angle_start ; a < angle_end ; a = a + 2) {
angle_compensated = a;
for (uint8_t r = 0; r < thickness; r = r + 1) {
x = cos(angle_compensated * 3.14 / 180) * (radius + r);
y = sin(angle_compensated * 3.14 / 180) * (radius + r);
x = center->x - x;
y = center->y - y;
/* img_buf[x + y * IMG_WIDTH] = img_buf[x + y * IMG_WIDTH] & color; */
for (int8_t ty = -2; ty <= 2; ty++) {
for (int8_t tx = -2; tx <= 2; tx++) {
img_buf[x + tx + (ty + y) * IMG_WIDTH] = color;
}
}
}
}
}
static px_coord_t center = {.x = IMG_WIDTH / 2 + CENTER_X_OFFSET - 5, .y = IMG_HEIGHT / 2 + CENTER_Y_OFFSET};
void CamCB(CamImage img) {
buf_t result_avg_2d, result_avg_1d;
px_coord_t out, in;
float angle;
int max_pos_inner, max_pos_outer;
uint8_t area_i;
uint16_t *b;
b = (uint16_t *)img.getImgBuff();
int16_t gaugeVal;
gaugeVal = 0;
if (!img.isAvailable()) return;
img.convertPixFormat(CAM_IMAGE_PIX_FMT_RGB565);
for (area_i = 0; area_i < TABLE_SIZE(outer_array); area_i++) {
GetPixels_scan_area(&outer_array[area_i], b, &Outer);
conv(&average, &Outer, &result_avg_2d);
conv(&average_1dim, &result_avg_2d, &result_avg_1d);
free(result_avg_2d.buf);
max_pos_outer = find_max(&result_avg_1d);
free(result_avg_1d.buf);
if (max_pos_outer == -1) {
continue;
}
GetPixels_scan_area(&inner_array[opposite_side_table[area_i]], b, &Inner);
conv(&average, &Inner, &result_avg_2d);
conv(&average_1dim, &result_avg_2d, &result_avg_1d);
free(result_avg_2d.buf);
max_pos_inner = find_max(&result_avg_1d);
free(result_avg_1d.buf);
if (max_pos_inner == -1)
{
continue;
}
getCoordfromPos(&inner_array[opposite_side_table[area_i]], &in, max_pos_inner);
getCoordfromPos(&outer_array[area_i], &out, max_pos_outer);
angle = getAngle(&out, &in);
gaugeVal = intrapolate(angle);
}
if (frameupdate++ % 1 == 0) {
printf("gauge: % 3d angle: %3.1f\n", gaugeVal, angle);
if (gaugeVal < 0) {
gaugeVal = 0;
}
for (uint16_t y = 0; y < 24; y++) {
for (uint16_t x = 0; x < 22 * (gaugeVal >= 1000 ? 4 : 3); x++) {
b[y * IMG_WIDTH + x] = 0x0000;
}
}
tft.setBuffer(b);
tft.drawLine(in.x , in.y , out.x, out.y , tft.color565(255, 0, 255));
tft.drawRect(IMG_WIDTH / 2 - BOX_SIZE + CENTER_X_OFFSET, (IMG_HEIGHT / 2 - BOX_SIZE) + CENTER_Y_OFFSET, BOX_SIZE, BOX_SIZE , tft.color565(0, 255, 0));
tft.setCursor(0, 22);
for (uint8_t r = 0; r < TABLE_SIZE(alarms); r++) {
DrawArc(¢er, 100, alarms[r].low_angle, alarms[r].high_angle, b, 1, alarms[r].color);
if (gaugeVal >= alarms[r].low_bound && gaugeVal < alarms[r].high_bound) {
tft.setTextColor(alarms[r].color);
}
}
tft.print(gaugeVal);
tft.drawRGBBitmap();
frameupdate = 1;
}
}
void setup() {
Serial.begin(BAUDRATE);
tft.begin();
tft.setRotation(3);
theCamera.begin(2, CAM_VIDEO_FPS_120, CAM_IMGSIZE_QVGA_H, CAM_IMGSIZE_QVGA_V, CAM_IMAGE_PIX_FMT_YUV422);
theCamera.startStreaming(true, CamCB);
tbl_init();
tbl_range_init();
tft.setTextColor(0xffff);
tft.setFont(&FreeMonoBold18pt7b);
}
void loop() {
/* do nothing here */
}






{kind=link}
Comments