



Hardware components | ||||||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
Now a days robotic design are becoming a common classroom curricula to study and work on the designs. Technical students are showing keen interest to design industrial, agriculture, medical, etc robotics. Robotic arms with stepper motor, servos, DC motors are designed for picking, cleaning, painting, drilling, handling, measuring, etc purposes. The main problem is to control the robotic smoothly and accurately to the specified position. Stabilization and motion controller technology is essential to control the motor drivers of robotic arm which should be done from the feedback sensors data. An advanced sensor device with on-board sensors temperature, Gyro, Accelerometer, Magnetometer and MIC with wireless connectivity monitoring remotely will be a highly recommended for the robotic arms.
Method of Design:Smart Robotic Arm Monitor Device is designed using the RSL10-SENSE-DB-GEVK device, As the device has on-board sensors like temperature, humidity, pressure, light, Accelerometer, Gyro, Magnetometer, MIC, RGB LED. RSL10 Sensor Development Kit has Nine advanced sensors and with Bluetooth 5 SoC & NFC which are suitable hardware in my application for which I am looking for. In addition to monitoring the data, the accompanying mobile application, connects to several cloud services like AWS, IBM, Azure, etc enabling the developer to store data in cloud for future analysis. My innovation idea was to design a health monitoring wearable device for the industrial robotic arms and Machinery by using this tiny RSL10 Sensor Development Kit. The existing devices has only a cloud connectivity or wireless connectivity if the data signal is poor it will be difficult to interact with the sensor device. In the present contest sensor hardware kit this problem can be overcome by connecting the device with NFC to record or read data from sensor board. It also has feasibility to control the actuators like light, motor through the app. The app can be configure to add the additional sensors and can program the RSL10-SENSE-DB-GEV with debugger. The designed kit can be used to sense the motion of the robot, environmental conditions in real-time.
RSL10-SENSE-DB-GEVK Use case:RSL10 Sensor Debug Kit has on-board sensors and their detail usage is as "NOA1305 Ambient light sensor" to monitor the artificial light conditions in the robotic lab if the light is dull their is a chance of accidents so proper lighting is need.
"BME680 environmental sensor" (temperature, humidity,pressure, air quality) are needed to monitor the robotic arm temperature during heavy work loads, moisture of the air so that it cannot affect by the rusting, air quality sensor gives the lab is free from dust or not.
"BMM150 - 3-axis digital geomagnetic sensor" is used to locate the direction of the robotic arm moving. Geomagnetic sensor can be used track the position of the arm with respective to the fixed base.
"BHI160 3−axis accelerometer, gyroscope" are used to monitor the motion and acceleration in three degrees from the bottom of the joints to the gripper, it also give the orientation of the arm while it is in action.
"INMP522 ultra−low power microphone" can be used for audio recording from which we can used to estimate the noise. If the noise factor is to high it is danger to human and the machinery need to undergo maintenance.
"APTF1616 - RGB LED" can be used as indicator to indicate the working action, alert, caution, process, etc with different color light glow on RGB LED.
The data can be visualized in the mobile app via Bluetooth connectivity or saved in the cloud like AWS, IBM, Azure. The new and variety of additional feature in RSL10 is it can insert NFC flexible antenna into dedicated connector and ease to read the data in live by taping with the NFC Smartphone. The collected data will be used for future analysis by the students, faculty to study the performance of the robotic arm when it is used for industrial application. This test procedure will help for the engineers, technicians to detect the faults in the robotic systems and undergo for maintenance in-time. Additional programming can be done with the debugger. RSL10 Sense and Control app is used to control the actuators and select the sensors.
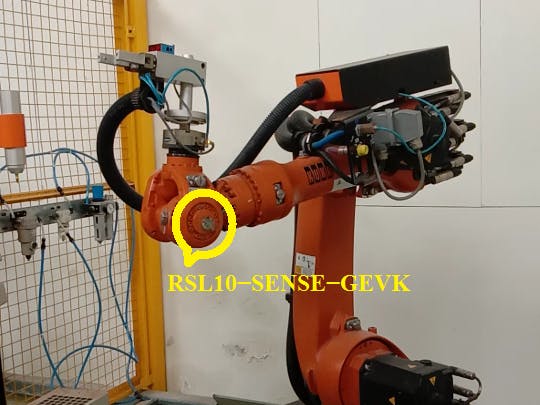
The Sensor module is placed on the Arm of the robot.
Mobile app Screenshot image of the Sensor module showing Accelerometer and Magnetometer to monitor the motion and direction of movement.
Mobile app Screenshot image of the Sensor module showing Temperature and Gyro for dry air and orientation.
Mobile app Screenshot image of the Sensor module showing Pressure and humidity to monitor the wetness in the robotic chamber unit.
The detail view is shown the video.
RSL10 Sensor development tiny kit is very much recommended in designing the new robotic arms or systems by the college students and check and understand the faults. I would like to test the performance of the tiny kit through this contest and would like to validate the robotic arm performance. It will be good opportunity for me to showcase the importance of the RSL10 Sensor Development kit in designing the advanced robotics for various applications in agriculture, transportation, medical, industries, etc.


Comments
Please log in or sign up to comment.