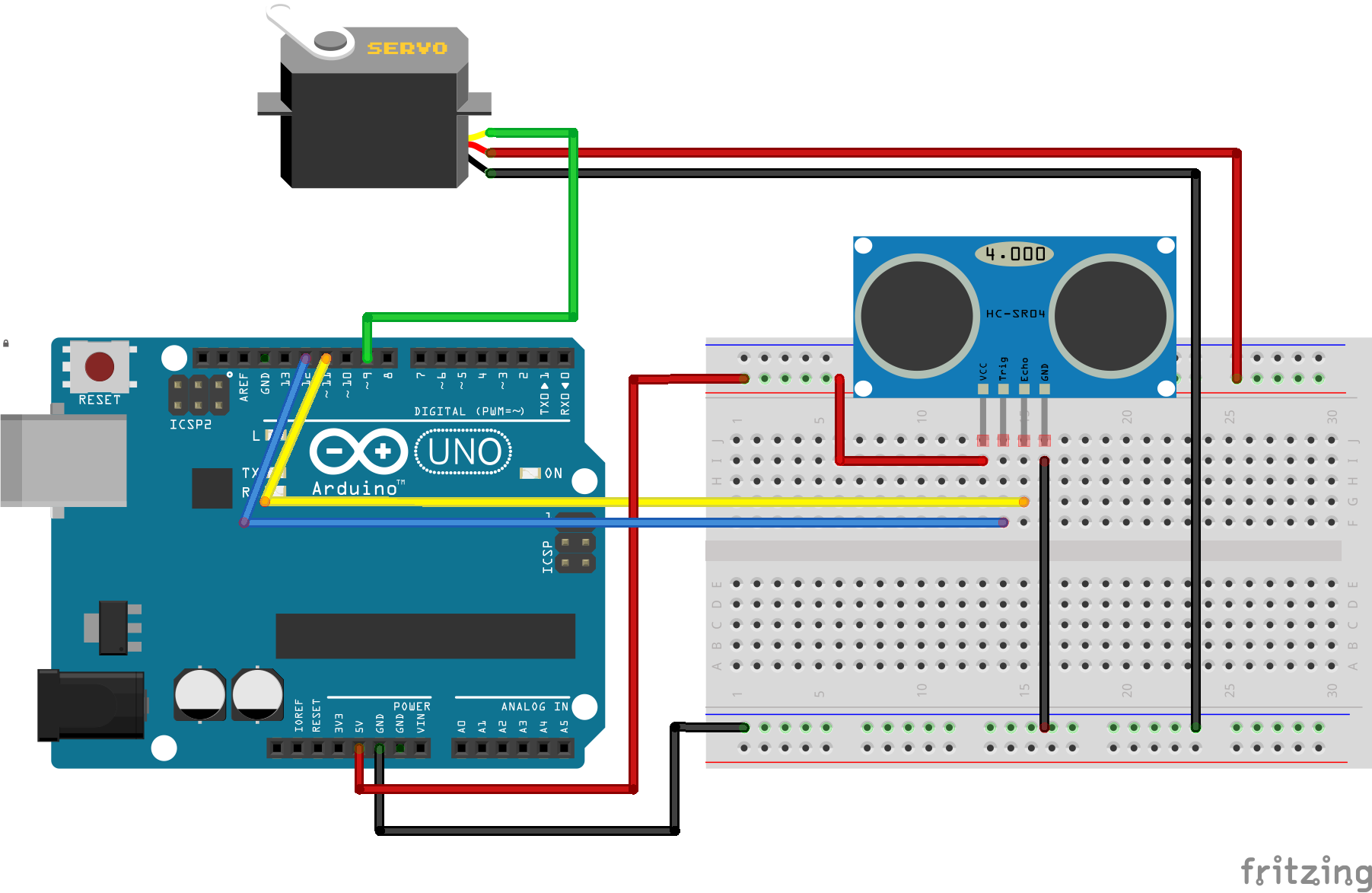
const int servo = 3;
const int trigPin = 10;
const int echoPin = 11;
// defines variables
long duration;
int distance;
#include <Servo.h>
Servo myservo; // create servo object to control a servo
// twelve servo objects can be created on most boards
int pos = 0; // variable to store the servo position
void setup() {
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
myservo.attach(servo); // attaches the servo on pin 9 to the servo object
myservo.write(0); // Sets Servo to initially 0 degrees
Serial.begin(9600); // Starts the serial communication
}
void loop() {
//
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Reads the echoPin, returns the sound wave travel time in microseconds
duration = pulseIn(echoPin, HIGH);
// Calculating the distance
distance= duration*0.034/2;
// Prints the distance on the Serial Monitor
Serial.print("Distance: ");
Serial.println(distance);
//Servo
if(distance<10){ //Check distance is less than 10cm
myservo.write(0); // Sets Servo in stages from 0 to 180 degrees so soap does not pitch out.
delay(100);
myservo.write(90);
delay(100);
myservo.write(135);
delay(100);
myservo.write(180); //Ajust how far you want the servo to go.
delay(1000);
myservo.write(0); // Reset the servo to 0 Degrees
delay(3000); //Delay the next time someone can get soap
}
}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)










{kind=link}
Comments