/*
File/Sketch Name: SoundLocator
Version No.: v1.0 Created 8 September, 2019
Original Author: Clyde A. Lettsome, PhD, PE, MEM
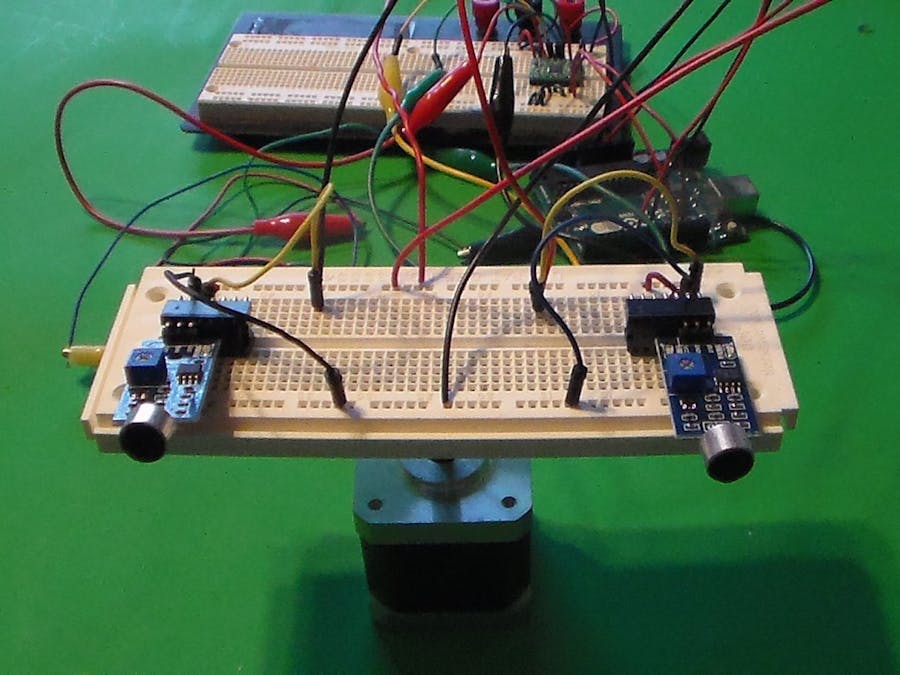
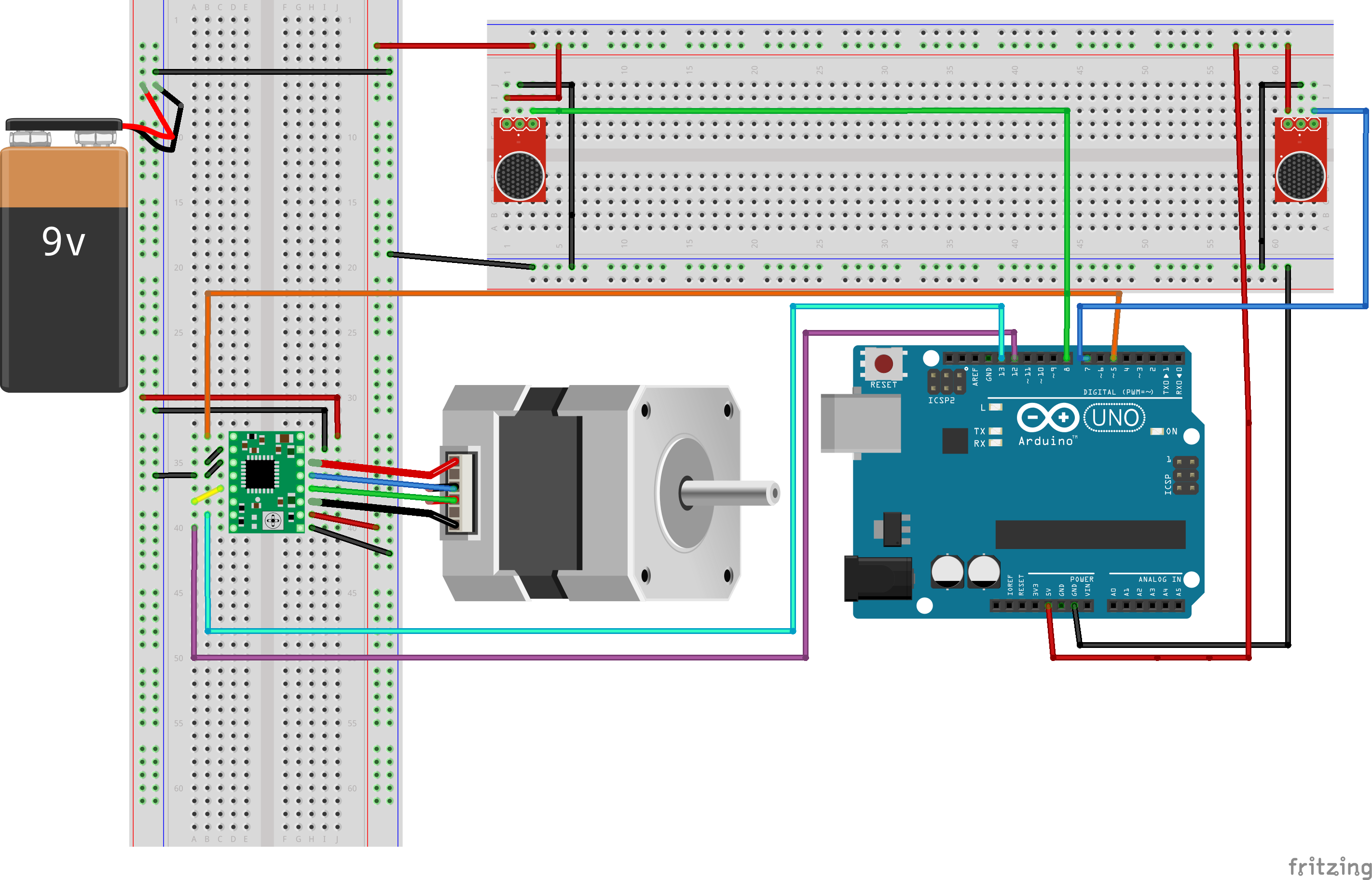
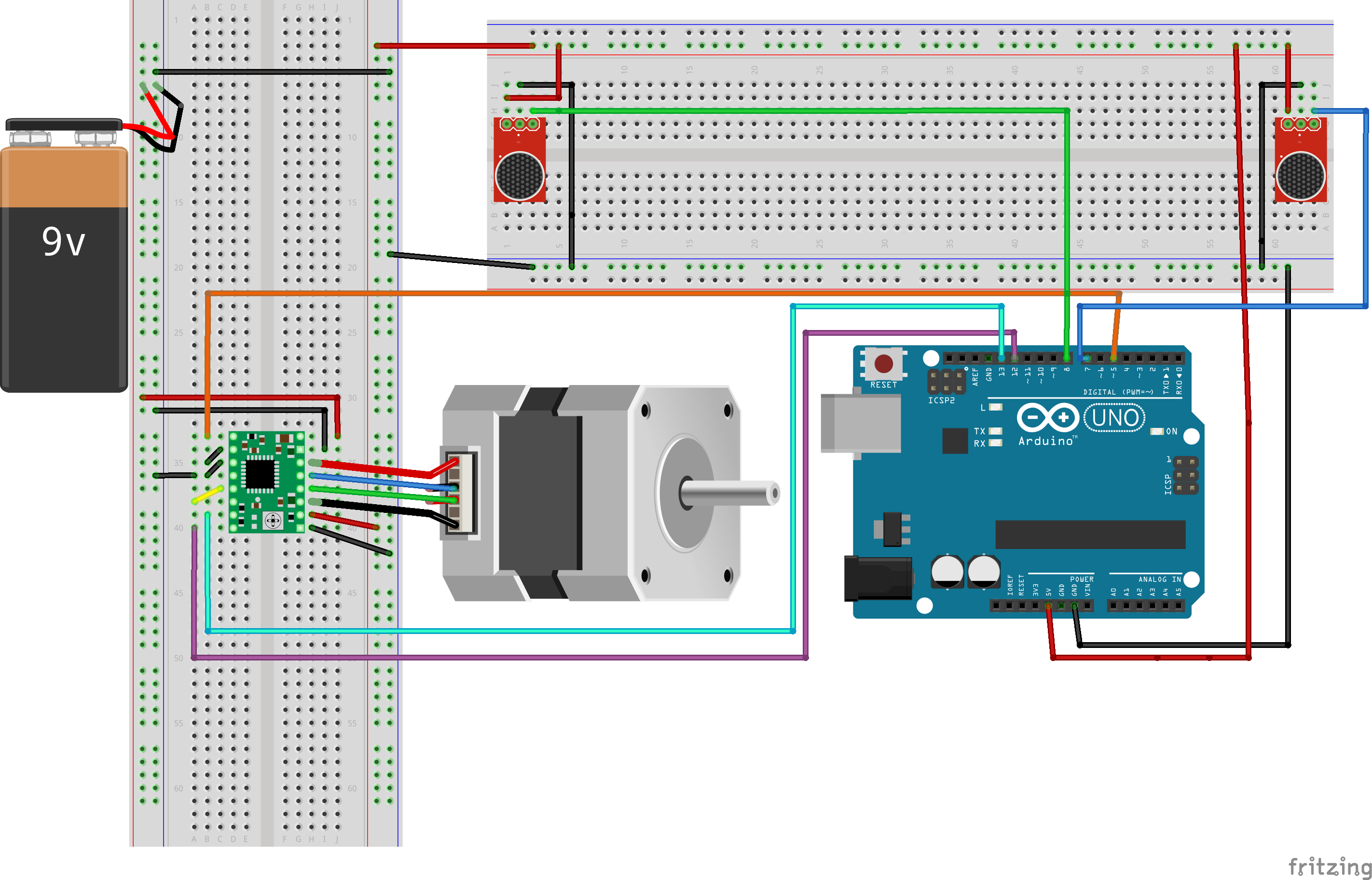
Description: This code/sketch makes finding the general direction of sound easy. This code/sketch is for a sound location finder using two microphone sensors
in conjunction with an Arduino Uno. The code/sketch polls two microphone sensors in a sound location finder circuit. If sound is detected in one microphone sensor and not the
other, the Arduino request a stepper motor in the circuit to turn the sound detection board in the direction of the sound. If the sound is detected in both microphones or no
sound is detected, the circuit does nothing and continues to poll the microphone sensors.
License: This program is free software; you can redistribute it and/or modify it under the terms of the GNU General Public License (GPL) version 3, or any later
version of your choice, as published by the Free Software Foundation.
Notes: Copyright (c) 2019 by C. A. Lettsome Services, LLC
For more information visit https://clydelettsome.com/blog/2019/09/08/my-weekend-project-sound-location-finder/
*/
const int stepsPerRevolution = 400; // change this to fit the number of steps per revolution for your motor
const int numberOfSteps = stepsPerRevolution/8; //45 degree turns
const int dirPin=12;
const int stepPin=13;
const int rightSensorPin=7;
const int leftSensorPin=8;
const int enablePin=5 ;
boolean rightVal = 0;
boolean leftVal = 0;
void setup()
{
pinMode(leftSensorPin, INPUT); //Make pin 8 an input pin.
pinMode(rightSensorPin, INPUT); //Make pin 7 an input pin.
pinMode (stepPin, OUTPUT); //Make pin 13 an output pin.
pinMode (dirPin, OUTPUT); //Make pin 12 an output pin.
pinMode (enablePin, OUTPUT); //Make pin 5 an output pin.
digitalWrite(enablePin, LOW); //Enable is active low
Serial.begin (9600); // initialize the serial port:
}
void loop ()
{
//poll inputs for signal
rightVal =digitalRead(rightSensorPin);
leftVal =digitalRead(leftSensorPin);
// when the sensor detects a signal above the threshold value set on sensor, turn finder to the direction of sound
if (leftVal==LOW && rightVal==HIGH)
{
Serial.println("Turning Right");
digitalWrite(dirPin,LOW); //turn counter-clockwise
//turn finder in the direction of the sound
for(int steps = 0; steps < numberOfSteps; steps++)
{
//create pulse to turn motor one step at a time
digitalWrite(stepPin,HIGH);
delayMicroseconds(10000);
digitalWrite(stepPin, LOW);
delayMicroseconds(10000);
}
delayMicroseconds(100000);
rightVal = 0;
leftVal = 0;
}
else if (leftVal==HIGH && rightVal==LOW)
{
Serial.println("Turning Left");
digitalWrite(dirPin,HIGH); //turn clockwise
//turn finder in the direction of the sound
for(int steps = 0; steps < numberOfSteps; steps++)
{
//create pulse to turn motor one step at a time
digitalWrite(stepPin,HIGH);
delayMicroseconds(10000);
digitalWrite(stepPin, LOW);
delayMicroseconds(10000);
}
delayMicroseconds(100000);
rightVal = 0;
leftVal = 0;
}
else
{
//Do nothing
rightVal = 0;
leftVal = 0;
}
}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)












_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.