


Hardware components | ||||||
_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
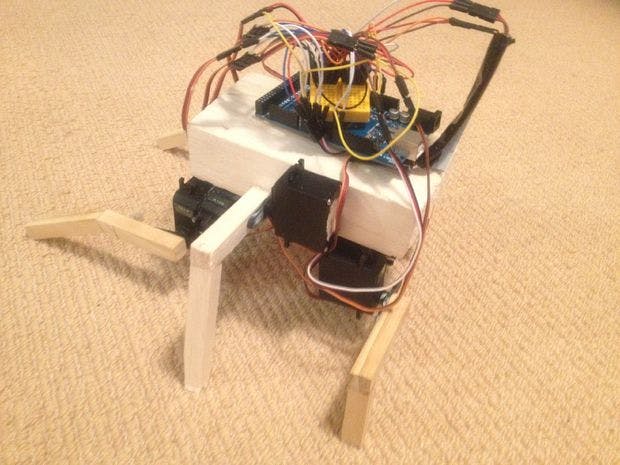
Rana (Italian for frog) is a biological inspired robot. It is the outcome of months of research and development. One of the principals applied comes from another intractable I made called "arduino biped robot". This robot uses the combined walking methods of an ant and a frog. This ensure that the robot strides and walks more realistically than most hexapods. This form of locomotion has never been used before and is completely original. It was developed by Stephane Hatgis-Kessell. Note that this robot was only built for research purposes but its principals will be used on other future robots.
The robot walks just like a ant and a frog. The four two legs are just like an ants. The first pare of legs are used for turning the robot. This legs have 2 degrees of freedom each. The second pare of legs are only used to ensure balance. These legs have one degree of freedom each. The last two pares of legs are similar two a frogs. They are slightly bent. They move in a breast stroke like movement.






Comments
Please log in or sign up to comment.