


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
 |
| |||||
 |
| |||||
 |
| |||||
| ||||||
2024 CAPSTONE IOT
PROJECT OVERVIEW
Operation Bio Drop is a combination water fountain and vending machine that is part of a larger series of art pieces that will be places in local business, museums and or community centers, and possibly in the future, in outdoor spaces.
The theme is an extension of an art exhibition series began in 2023 called Connect the Flow. which reflected on the mind-body connection and its relationship to overall wellness.
This current iteration of the series will seek to ENGAGE, EDUCATE and ENDEAR viewers. Educational topics will range from environmental issues such as erosion and pollinator habitats, health and wellness awareness such body systems, and cultural issues.
MOTIVATION PROBLEMS TO SOLVE
In this social media society, it is common to feel disconnected form others as well as from one’s own body. This project seeks to provide an engaging way to educate the public about issues and endear them to one another and the city of Albuquerque through common goals and community building.
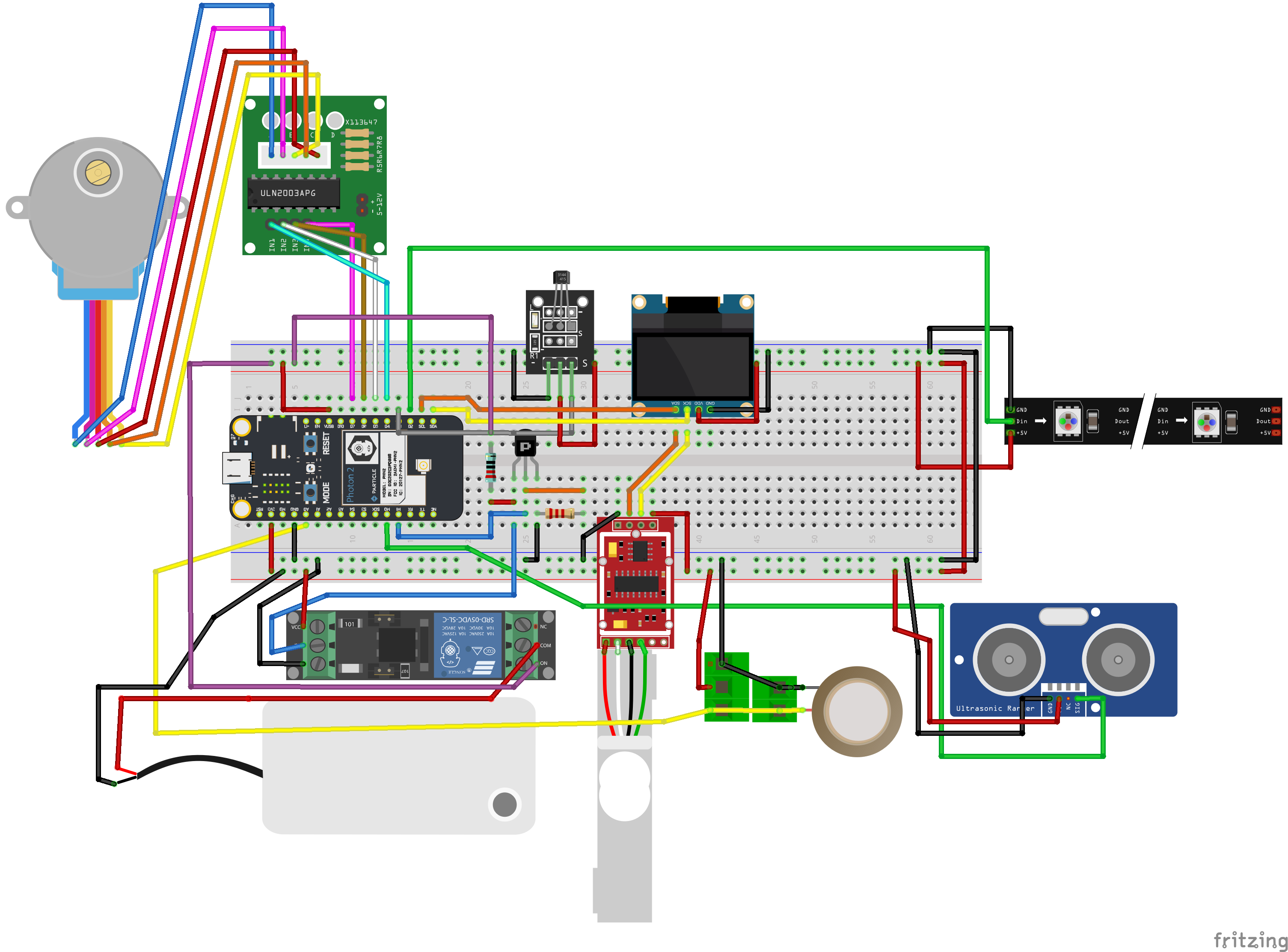
COMPONENTS
Particle Photon 2
OLED screen
Ultrasonic distance sensor
Relay
Water Pump
Neo pixel strip
Piezo pressure sensor
Stepper motor
3D printed parts, including an Archimedean screw
Laser cut components
A Lot of wood glue
FUNCTIONALITY and CODE
Thes device has two major functions.
The first, is that of a drinking fountain. Due to its size, I have decided to designate it as a drinking fountain for bees. The small amount of water gathered will be poured into a small shallow dish on the top of the device. In the future, there will be a load cell to check the weight of this container to prompt refilling, and or send data to the dashboard about how much water is being used.
STEP 1: The OLED screen prompts passersby to get water, (“Do you want to bathe a bee?”. In the future, the motion sensor will trigger the lights when anyone is a range of 3 feet. Its normal state will be asleep to save energy.
STEP 2: The ultrasonic sensor is triggered within a distance of 1 cm. A relay attached to a water pump is triggered and water is dispensed. When the cup is moved out of range, the water stops.
At the same time the relay is triggered, data is sent to a feed that tracks the number of interactions. In the future, I will be adding a location tracker as well.
STEP 3: After the really stop, the OLED thanks the visitor and prompts them to touch the face of the panel, under which a piezo pressure sensor is placed. The sensor is programed using the “high sticker” concert. Upon touch, the lights fill according to strength of pressure.
There are 60 pixels on the strip. The OLED will message the user at each try. If the pixels reach the end point and pixel number 59, they receive a “well done” message and a prompt to wait for a prize. If they do not reach this pixel, the OLED will prompt them to try again.
If the end pixel is reached, the stepper motor will be triggered to turn and release a seed infused paper via a wire-type vending method. An Archimedean screw was 3D printed for this task, but issues with scale arose and it was replaced with a wire.
ISSUES and CHALLENGES:
One of the first intended components, a load cell, which was meant to collect data on weight was attempted but abandoned due to wildly inaccurate readings. This took up valuable time before then.
Scale was an issue for this project. Larger size earns more material cost and difficulty in storage. I was committed to a smaller size from the outset, and seven attempts and 3d printing and decking laser cutting files confirmed this choice. However, this caused a series of other problems.
Ideally, it would have been better to have one function in a box with an area of about 8x10. Trying to fit all the components inside was difficult and time consuming. In the end, there were concessions made and some components, such as the Archimedean screw, were abandoned.
The vending machine portion does not currently work, needing a housing unit to help push the items through the coil or spiral.
Overall challenges included combining code into a master draft and (keeping it from breaking) and managing the other required tasks.
FUTURE PLANS
I plan to make a series of boxes that have isolated functions. The first is the fountain and the next is the seed vending machine. My original plan before enrolling in this boot camp was to create a scavenger hunt around the city.
Partnering with local businesses along the rail trail and beyond, these interactive boxes will tell stories and educate the community of Albuquerque.
I would eventually like to create biannual or quarterly scavenger hunts that use IoT to gather data in how the boxes are being experienced. I have a lot to learn, but the seed has already been planted. Operation bio drop is on its way!





{kind=link}
Comments