import cv2
import serial
import mediapipe as mp
import math
import numpy as np
import time
import pyfirmata
#--------------
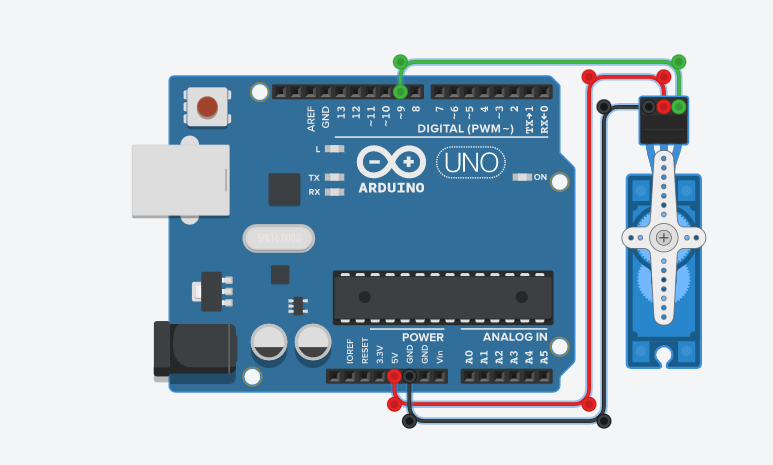
board = pyfirmata.Arduino('COM3')
servo = board.get_pin('d:9:s')
mp_drawing = mp.solutions.drawing_utils
mp_drawing_styles = mp.solutions.drawing_styles
mp_hands = mp.solutions.hands
# Webcam Setup
wCam, hCam = 640, 480
cam = cv2.VideoCapture(0)
cam.set(3,wCam)
cam.set(4,hCam)
with mp_hands.Hands(
model_complexity=0,
min_detection_confidence=0.5,
min_tracking_confidence=0.5) as hands:
while cam.isOpened():
success, image = cam.read()
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
results = hands.process(image)
image = cv2.cvtColor(image, cv2.COLOR_RGB2BGR)
if results.multi_hand_landmarks:
for hand_landmarks in results.multi_hand_landmarks:
mp_drawing.draw_landmarks(
image,
hand_landmarks,
mp_hands.HAND_CONNECTIONS,
mp_drawing_styles.get_default_hand_landmarks_style(),
mp_drawing_styles.get_default_hand_connections_style()
)
# multi_hand_landmarks method for Finding postion of Hand landmarks
lmList = []
if results.multi_hand_landmarks:
myHand = results.multi_hand_landmarks[0]
for id, lm in enumerate(myHand.landmark):
h, w, c = image.shape
cx, cy = int(lm.x * w), int(lm.y * h)
lmList.append([id, cx, cy])
# Assigning variables for Thumb and Index finger position
if len(lmList) != 0:
x1, y1 = lmList[4][1], lmList[4][2]
x2, y2 = lmList[8][1], lmList[8][2]
# Marking Thumb and Index finger
cv2.circle(image, (x1,y1),15,(255,255,255))
cv2.circle(image, (x2,y2),15,(255,255,255))
cv2.line(image,(x1,y1),(x2,y2),(255,0,0),3)
length = math.hypot(x2-x1,y2-y1)
if length < 50:
cv2.line(image,(x1,y1),(x2,y2),(0,0,0),3)
Pos = np.interp(length, [50, 220], [0, 100])
Posgripper= (round(Pos))
#print(Posgripper)
converted_Posgripper = str(Posgripper)
cv2.putText(image, str(Posgripper), (50, 60), cv2.FONT_HERSHEY_COMPLEX, 2, (255, 0, 0))
#cv2.line(image, 320, 320, (0,0,0), 2)
Servopos=(100-Posgripper)
print (Servopos)
servo.write(Servopos)
cv2.imshow('handDetector', image)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cam.release()


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)





{kind=link}
Comments