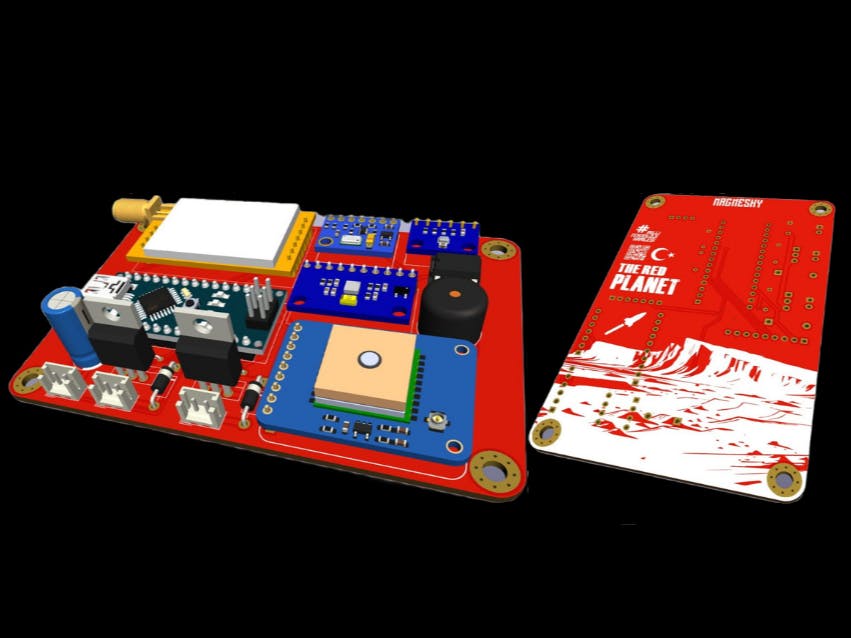
The avionics model we completed was carefully designed to meet all the needs of our rocket team. We use the Arduino Nano circuit board for processing power, which streamlines our coding processes. Our card triggers two separate recovery systems at different times, so we can make adjustments according to our needs. This mechanism was specially designed for the Teknofest Rocket competition in which we will participate as the Magnetarge team. Our goal is to reach an altitude of 3, 000 meters and for this (E220400T30D) communicates with the ground station with the Lora module and sends data. In this way, we can quickly transfer altitude and other data to the ground station when necessary. The Lora module we use has a range of 8 kilometers in free space and is suitable for climbing to higher altitudes.
As a rescue system, we use two parachutes, the drift parachute and the main parachute. By opening these at different times, we ensure safe landing. While the drift parachute opens immediately after the fuel is completely exhausted, the main parachute is planned to open 600 meters before the rocket's ground.
We use the BMP280 sensor for pressure and temperature measurements, and the MPU9250 combines 3-axis gyroscope, accelerometer and magnometer sensors on a single board. The 24C512 EEPROM chip allows us to store small data permanently, preserving the data after the rocket lands even when communication with the ground station is lost.
Additionally, the Adafruit Ultimate GPS Breakout (GPS) module provides information about our rocket's location. These advanced features enhance the safety, efficiency and success of our rocket missions and reflect our commitment to innovation and excellence in aerospace technology. We believe our avionics model has many potential applications that are not limited to just the competition arena.







_4YUDWziWQ8.png?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)






_Ujn5WoVOOu.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)

Comments
Please log in or sign up to comment.