

Smart tracking car is the most widely used in school for helping students to learn about mechanical structure, electronics and such basic skills as the principle of sensors, automatic control, soldering and so on.
This tracking car can drive along the black runway automatically. No matter how the runway curves, the car can be driven automatically.
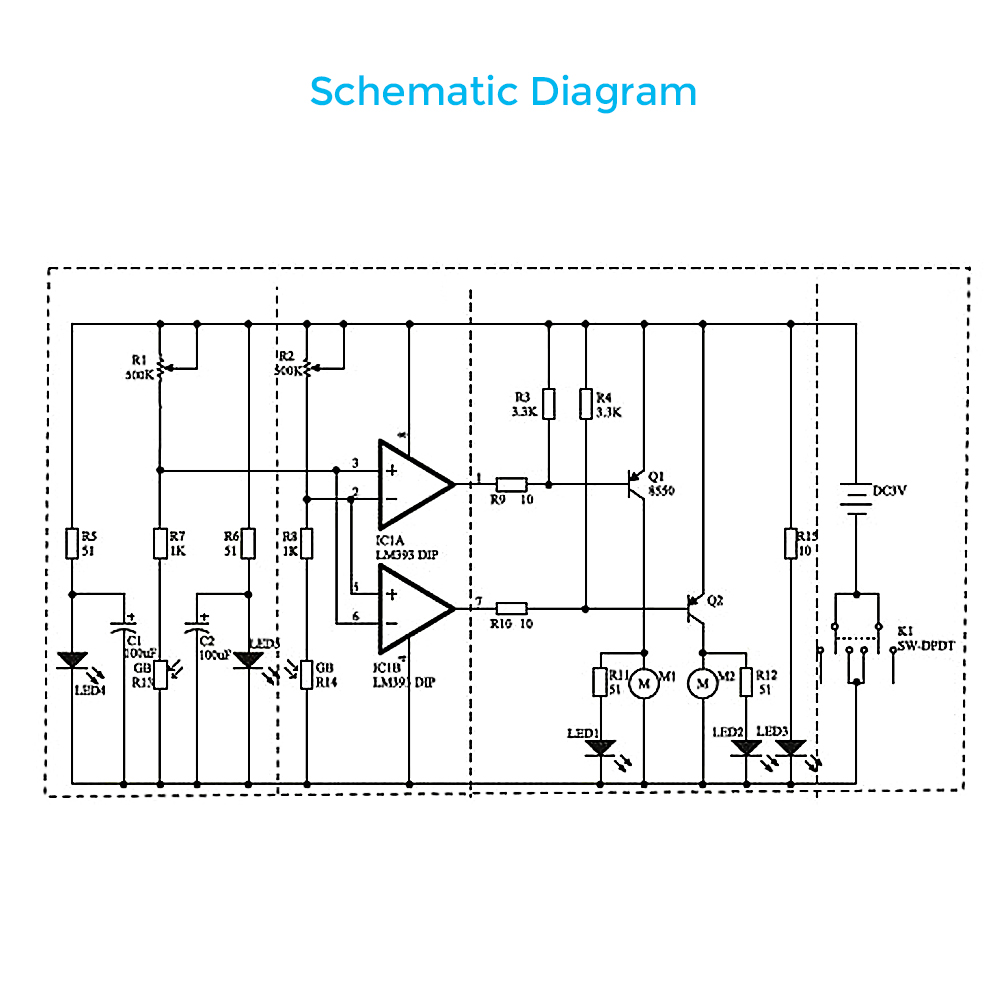
We all know that the reflectivity is different when the light source shines onto white objects and black objects. Here we used a red light source. The light is reflected through the ground to the photoresistor. By detecting the resistance of the photosensitive resistor, we can determine whether the car is driving in the white area. If the black runway is detected, then the car will change the direction of its driving and the motor will slow down, or even stop, with the red LED off on PCB front side. Drive the car in the opposite direction so that the car is always running along the runway.
SchematicInstallation Steps
1. Install circuit1.1
- Install the metal film resistor, DIP-8P IC socket, self-locking switch, potentiometer, S8550, electrolytic capacitor and 5mm red LED on PCB according to mark on PCB.
- Pay attention to the direction of IC socket.
- In addition to facilitating debugging, don’t install LM393 temporarily.
1.2 Install Mecanum wheel
- PCB placed in front. The support bolts of the caster are inserted into the hole, tighten the nuts screwed into the caster, and finally fit the caster and tighten.
1.3 Install photoresistor and white LED on PCB reverse
- But please make sure the distance is about 5mm between top of Mecanum wheel (top of screw cap) and photoresistor/LED.
1.4 Install battery case
1.5 Test
- Install 2 AA batteries
- Press on switch. If the 2 white LEDs are on, the installation was successful. If the LEDs are off, please check the soldering. Pay attention to the direction of the LEDs and other components, and check pseudo soldering.
2.1 Install the four gaskets on the circuit board
- The role of the gasket is to increase the gap between the axle and the circuit board, so that the gear mounted on the shaft has enough rotation space.
- First insert a M2.2 * 8 screw from the front of the board into the mounting hole, place a gasket from the back of the circuit board on the screw.
- Clamp the gasket with a small pliers, turn the screw with a small screwdriver until the gasket is close to the circuit board at last.
2.2
- Insert a steel shaft from the center hole of the wheel and note that the direction is inserted from one side of the raised sleeve of the wheel. It is better to insert the steel shaft parallel to the smooth side of the wheel.
2.3
- Put a three-way sleeve into the steel shaft, close to the wheel, and then a gasket into the steel shaft, close to the three-way sleeve.
- Installed in place, toggle the three-way sleeve. It should be flexible, or otherwise appropriate to increase the gap between them.
- Install tires.
2.4
- Place a gear into the steel shaft in the center of the steel shaft.
2.5
- Put a three-axis sleeve into the end of the steel shaft so that the car side of the wheel assembly may be complete.
- Holding the wheel by hand, keep the steel shaft level and adjust the position of the three-way sleeve on the end of the steel shaft. The gears on the steel shaft should fall into the gear slot, otherwise the gear position should be adjusted until it meets the requirements.
- Finally, the two shafts on the steel shaft are fitted into the screw projections of the fixed washers and tightened with a small screwdriver so that the wheel assembly is installed.
- Install the other side of the wheel assembly in the same way.
2.6 Install Motor
- Insert a worm into the motor shaft.
- Then connect that worm from the front of the circuit board to others.
- Use two small screws to hold the motor. Pay attention to the direction of motor.
- Contact motor and PCB by cable.
It can reverse the wire of motor if motor moves to the contrary when power on.
3.1 Power on
- Check S8550 or 10 ohm resistor if motor doesn’t move.
3.2 Install LM393
- Pay attention to the direction of IC.







{kind=link}
Comments