


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
I planned to develop a prototype model for disinfecting the virus/bacteria in a room. In a prototype model, I used a sample model uv-c lamps instead of original but added all the specification details and power consumption of uv-c in detail. The scope of my prototype is to ensure a cost effective robot for disinfection.I used raspberry pi as master controller.
I have divided the project into Four main sections as :
- Remotely control feature
- Safety features
- UV-c hardware
- Power consumption
Before proceeding with the brief documentation, Please look into my prototype demo video.
This is a prototype model with all the specified features
1. Remotely Control featureThe robot has 8 mpx Pi camera 2 and Raspberry pi 3 which has in built WiFi.
Configuring Motion
Edit the motion.conf file by typing:
$ sudo nano /etc/motion/motion.conf
Also edit :
DAEMON = OFF (change to ON)
Webcam_localhost = ON (Change to OFF)enabling the motion:
$ sudo service motion startFor enabling the camera hardware :
$ sudo modprobe bcm2835-v4l2Once motion has started, then live streaming is started in its ip address.
To get the ip address, type :
$ sudo ifconfigThen in any local web browser, type the ip address with port as 8081 or sometimes 8080.
For controlling the robot, I used putty software. Since it take direct remote to the Raspberry pi itself, So there is no chance of hacking the robot from external Wifi source.
type the same ip address as you types in browser to connect.
Putty configuration for remote control:By default the username will be pi and password will be raspberry
Once it is connected, Run the pi_robot program in command window.
2. Safety features2.1 RFID AccessSince UV - c rays are harmful for human beings, controlling the robot and warning the person who comes inside the room when disinfection process is started.
The robot is made for using in offices, hospitals, malls. So the admin have the authority to control the robot. I introduced RFID authorization check to access this robot. In present days, disinfectant robots, this feature was missing, but this will make sure that any other third person cannot misuse it.
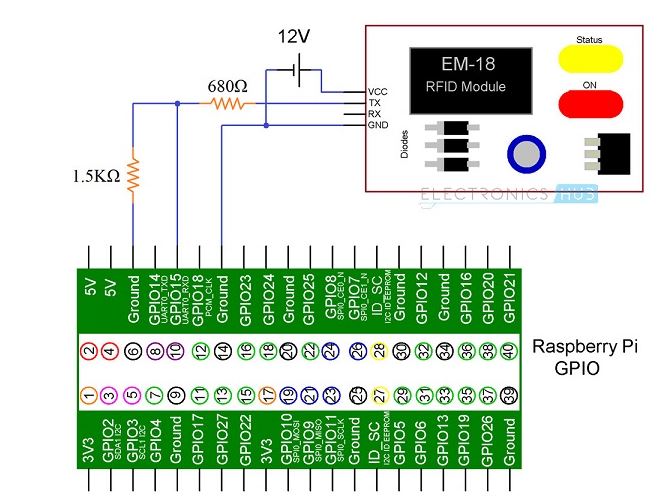
I have connected the EM18 RFID module to the Raspberry GPIO14 (PIN10) as RX UART. Since the output of RFID reader is 5v, I passed it to the potentiometer to step down to the 3.3v and connected to specific pin ( PIN10).In a attached code, you can see the checking for specific RFID ID card. unless it is authenticated, no one can operate this Robot.
For enabling serial interface in Raspberry:
sudo raspi-configTo check the serial connection status.
dmesg | grep ttyTo make this product globally reach, Voice assistant will ensure that any persons with proper guidance can operate ( That person should have authenticated RFID).
Voice assistant will explain the operation process in step by step, So the user will be get benefited. Since this is not a lab robot, the end user will be a normal cleaning staffs in offices, hospitals. So this feature will help them to use it without any difficulty.
For text to SPeech I used espeak lib in raspberry. I have attached the sample code for testing purpose also. In working video, you can clearly notice the voice assistant for operating the robot. By getting further feedback, this feature can be established more for better usage too.
Another advantage of voice assistant is during operation, it will announce that disinfection process is happening. So that any person who trapped in room or bathroom can be get notified.
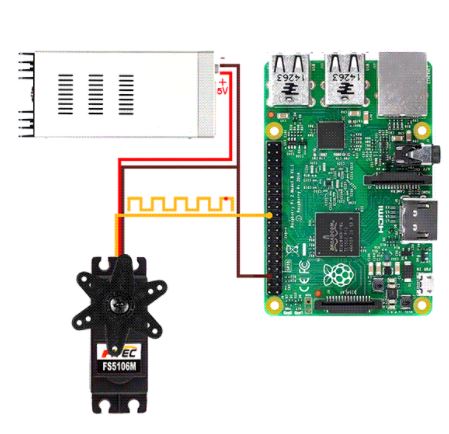
To install espeak :
sudo apt-get install espeakA speaker is connected using 3.5mm jack to the raspberry Pi.
2.3 Servo motor protectorThis is another feature I tried in prototype. When a person is detected in room, the uv-c can be turned off remotely and also at the same time, The radiation should under threshold limit.
For this purpose I used a Black Sheet beside, uv-c lamp model. This sheet can cover the uv-c lamp during emergency shutoff time.
For this operation, press 'o' for opening and 'c' for closing the uv-c lamps.
Please find the logic in attached code.
3.UV-c hardwareIn my prototype I concentrated on safety features and innovation techniques, So I have used sample uv-c model in prototype.
But I will be explaining a detailed hardware configuration for uv-c lamps.
Three sets of UV-c lamps can be used on top of the robot.
The UV-c lights operate at 230v AC supply, So 12 DC to 230v AC kit shall be used.
I have attached the link regarding Converter.
All these lamps can be connected parallel.
Example:
For UV-c consumption alone, I have calculated the below operating hours.
In my design, three batteries are used. One if for motor control, uv-c supply and power bank for master control - raspberry pi.
Reason behind the battery model
Since it is highly dangerous any of the device gets interrupted to low battery and for safer operation, I used power bank for raspberry which can Run 10 hours continuously in any environment, So If any fault occurs. This helps to shutdown the uv-c and cover the lamps using black sheet.
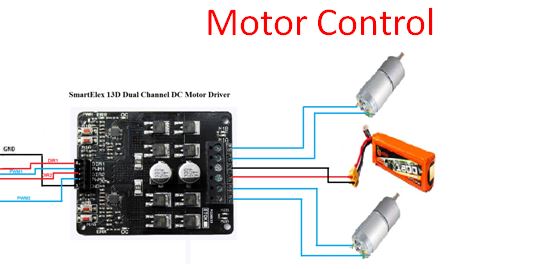
Motor operation drains more energy in operation and if any power fluctuation occurs, it will restart the raspberry pi. So in order to avoid such circumstance, I am using separate Li ion battery for the robot motors.
Motor driver
motor.
connection). 2. Only 1 control signal is needed to control the speed and direction of the motor. PWM pin is connected to logic high while the DIR pin is being feed with the PWM signal. When the PWM signal has 50% duty cycle, the motor stops running. If the PWM has less than 50% duty cycle, the motor will turn CW (or CCW depending on the connection). If the PWM signal has more than 50% duty cycle, motor will turn CCW (or CW depending on the










_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.