My project idea is to design a Caps which can detect if someone from behind doesn't follows social distancing and comes closer to you. This kind of caps can be wore in offices, malls, public transports.
The Reason behind my project idea:
During Covid19 pandemic situation, When I was buying groceries and standing in queue. I was cautious about maintaining social distancing and I am strictly maintaining 1.5 metres gap in front and sideways too. But later I found, the person behind me doesn't follow the social distancing and comes closer to me, Which I was not aware.
Proper social distancing
In India , After the three months of lock down phase. Now government initiated Unlock phases. Maintaining a social distancing in a country with 1.3 billion population is a tough task. Even I noticed in public transports, grocery shops where some one trying to maintain social distancing but they missing the 1 to 2 metres gap from behind. This is a common problem faced by all of us in worldwide.
I planned to develop a Caps which can be wore in offices, public transports and grocery shops where the social distancing is mandatory. Since we can be cautious in front and sideways to maintain the distance, I want to place a sensor in backside of the caps to detect and notify us, If the social distancing is violated from the person who stood behind us.
Working Mechanism
The ultrasonic sensor is placed on backside of the caps, which measure the distance between the sensor and person stood behind us.
I have programmed the arduino Nano where the variable " SuggestedSocialDistance" can be modified to range 100 cms to 200cms.
Placement of Ultrasonic sensor and servo motor
If the measured ultrasonic sensor distance is lesser than the "SuggestedSocialDistance", then the servo motors start rotating gently from 0 to 180 degree and falls back to 0 quickly to get your attention.
The working model with descriptions is added in this video.
Working Model of the social distancing caps
Why Servo motor is used?
I planned to design this caps for office uses and also in public places too.
In office space, If the caps notify us through buzzer sound, then it will create noisy environment in office. And also user might feel uncomfortable.
In public places, the environment noise will be higher than the buzzer sound. For example, let consider the person travelling in public transports, where the noise will be higher and the person might miss to recognize it.
For a gentle movement, I decided to include servo motor. It will tickle the person's ear which wont cause any irritable sensation to the user and also it won't cause any kind of disturbance to the person standing nearby.
Social distancing mode:
It has a switch to turn ON/OFF the device attached to the caps, So If you are decided to turn off the device, just swipe it to turn off the device.
Conclusion
The developing nations with high population, where the social distancing is still questionable. My project idea will be cost effective and common for any gender and also easily implemented in any Cap model.
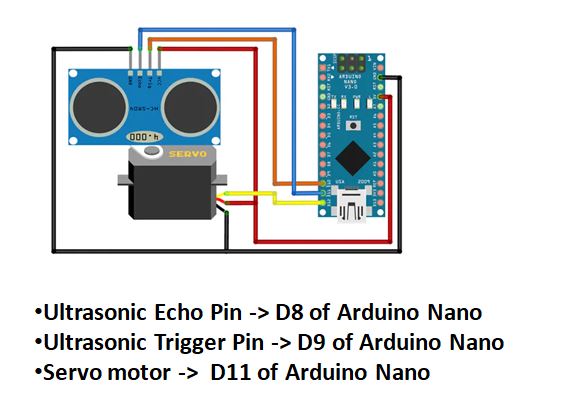
Copy and paste it in Arduino IDE. Connect as per the wiring diagram
#include <Servo.h>Servo myservo; // create servo object to control a servo
int val; // variable to read the value from the analog pin
long SuggestedSocialDistance=100; //100 cm equals to One meter // Can be modifiable
const int pingPin=9; // Trigger Pin of Ultrasonic Sensor
const int echoPin=8; // Echo Pin of Ultrasonic Sensor
int angle=0;void setup(){ Serial.begin(9600); // Starting Serial Terminal
myservo.attach(11); // attaches the servo on pin 1 to the servo object
}void loop(){ long duration, inches, distanceinCm; pinMode(pingPin, OUTPUT); digitalWrite(pingPin, LOW); delayMicroseconds(2); digitalWrite(pingPin, HIGH); delayMicroseconds(10); digitalWrite(pingPin, LOW); pinMode(echoPin, INPUT);duration= pulseIn(echoPin, HIGH);inches= microsecondsToInches(duration);distanceinCm= microsecondsToCentimeters(duration); //Serial.print(inches); //Serial.print("in, ");if(distanceinCm < SuggestedSocialDistance) //hand is placed near sensor
{distanceinCm= microsecondsToCentimeters(duration); delay(10);angle+=1;if(angle <=180){ myservo.write(angle); //command to rotate the servo to the specified angle
delay(5); Serial.println(angle);}else{for(angle=180; angle >=1; angle -=10) // command to move from 180 degrees to 0 degrees //
{ myservo.write(angle); //command to rotate the servo to the specified angle
Serial.println(angle);}angle=0;} delay(5);}else{angle=0; Serial.print("cm "); Serial.println(distanceinCm); myservo.write(0); //command to rotate the servo to the specified angle
delay(5);} //Serial.print("cm"); //Serial.println(); delay(10);}long microsecondsToInches(long microseconds){return microseconds / 74 / 2;}long microsecondsToCentimeters(long microseconds){return microseconds / 29 / 2;}





















{kind=link}
Comments
Please log in or sign up to comment.