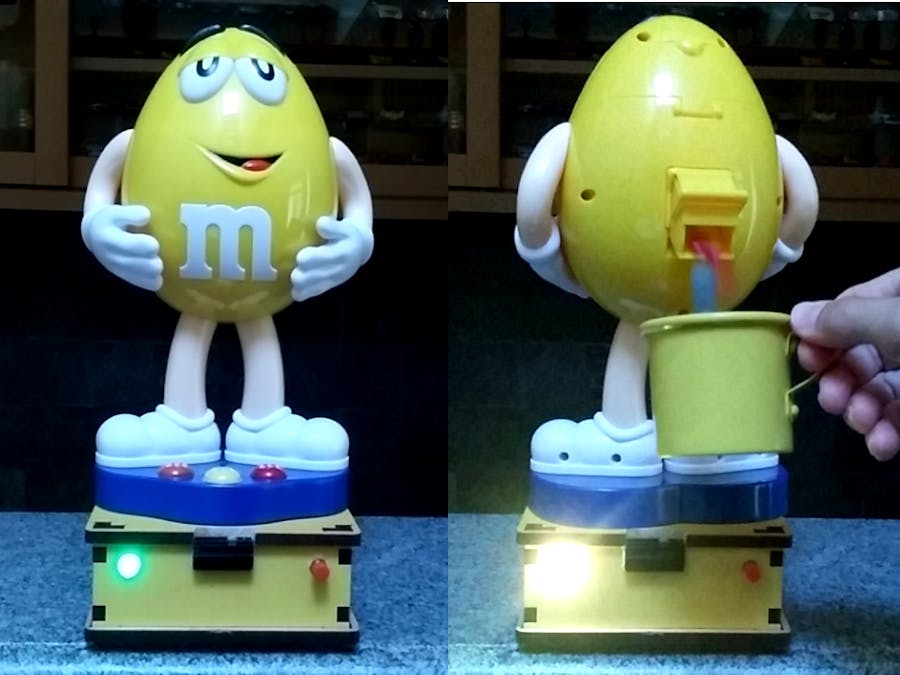
//----------------------------------------------------------------------------//
// Filename : AutoDisp.ino //
// Description : Automatic Dispenser //
// Version : 1.0.0 //
// Author : Marcelo Avila de Oliveira <marceloavilaoliveira@gmail.com> //
//----------------------------------------------------------------------------//
//----------------------------------------------------------------------------//
// DEFINITIONS //
//----------------------------------------------------------------------------//
// TURN ON DEBUG MODE
// #define DEBUG_TEST
// #define DEBUG_TIMEOUT
// #define DEBUG_NFC
// #define DEBUG_PROX
//----------------------------------------------------------------------------//
// LIBRARIES //
//----------------------------------------------------------------------------//
// SERVO LIBRARY
#include <Servo.h>
// SOUND LIBRARY
#include <Pitches.h>
// NFC LIBRARIES
#include <SPI.h>
#include "PN532_SPI.h"
#include "PN532.h"
#include "NfcAdapter.h"
PN532_SPI interface(SPI, 10);
NfcAdapter nfc = NfcAdapter(interface);
//----------------------------------------------------------------------------//
// CONSTANTS //
//----------------------------------------------------------------------------//
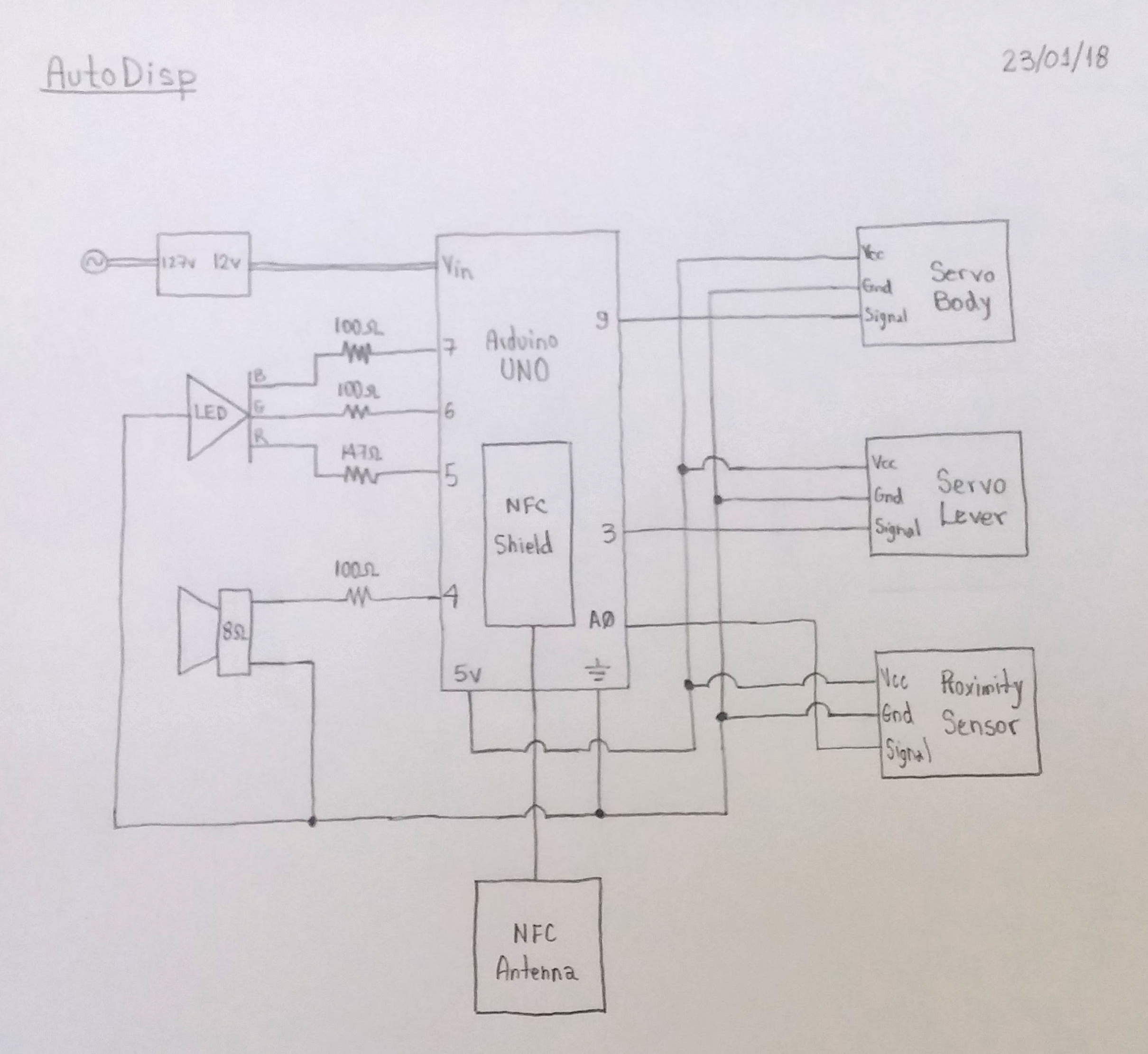
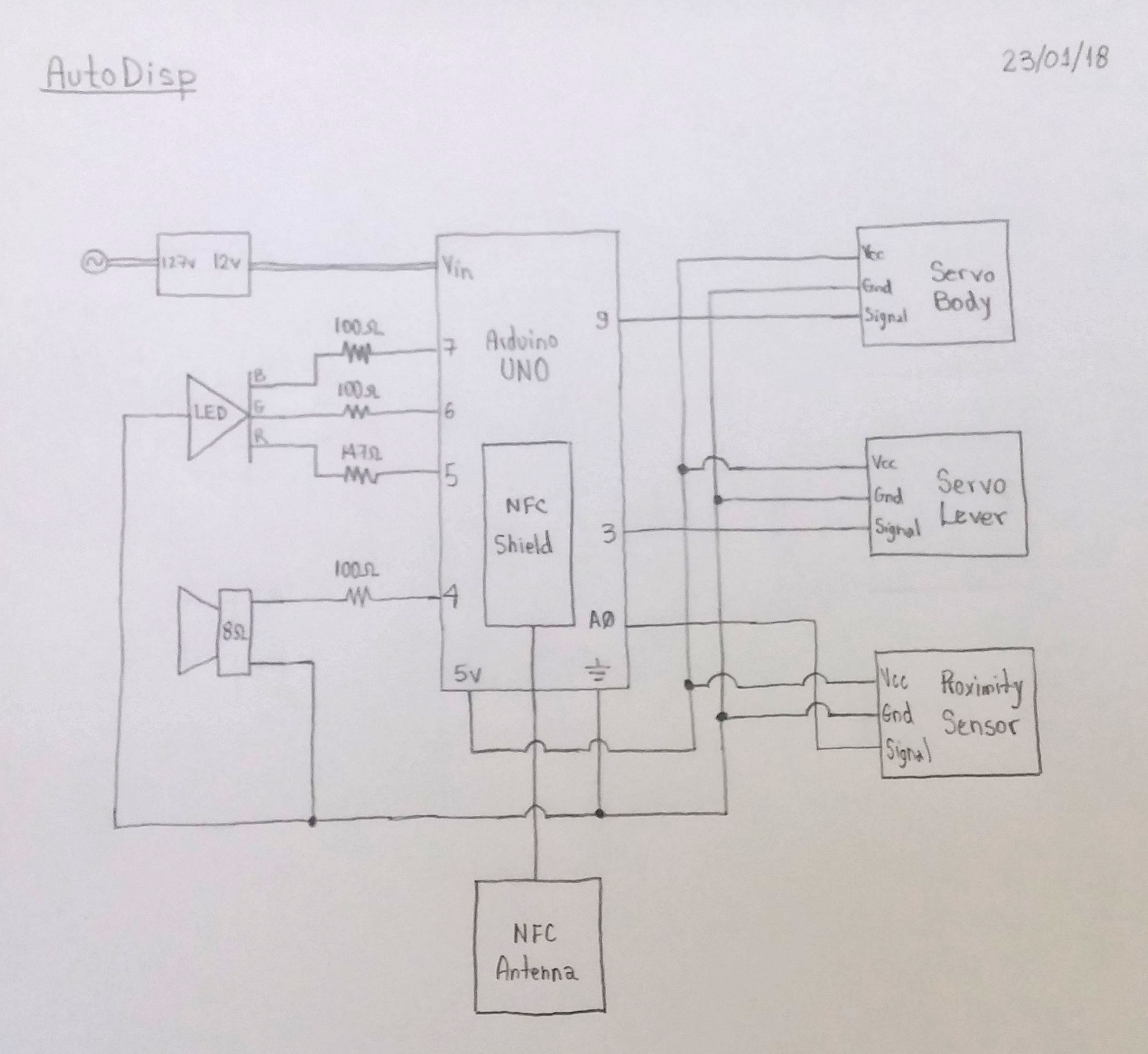
// MOTORS
Servo lever_motor;
Servo body_motor;
// PINS
const int body_pin = 9;
const int lever_pin = 3;
const int speaker_pin = 4;
const int prox_pin = A0;
const int led_r_pin = 5;
const int led_g_pin = 6;
const int led_b_pin = 7;
// POSITIONS
const int body_min = 180;
const int body_max = 0;
const int lever_min = 0;
const int lever_max = 55;
// NFC
String const nfc_id_auth = "EB C8 66 D6";
// TIME
const unsigned long timeout = 10000;
// MATH
float percent_to_bright_factor = 100 * log10(2) / log10(255);
//----------------------------------------------------------------------------//
// VARIABLES //
//----------------------------------------------------------------------------//
// STATUS
boolean lock = true;
boolean front = true;
boolean lever_ok = false;
// TIME
unsigned long timeout_lock = 0;
unsigned long timeout_front = 0;
int time_nfc = 0;
//----------------------------------------------------------------------------//
// FUNCTIONS (SETTINGS) //
//----------------------------------------------------------------------------//
void setup() {
// INITIALIZE PINS
pinMode(speaker_pin, OUTPUT);
pinMode(led_r_pin, OUTPUT);
pinMode(led_g_pin, OUTPUT);
pinMode(led_b_pin, OUTPUT);
pinMode(prox_pin, INPUT);
// INITIATE SERIAL COMMUNICATION
Serial.begin(9600);
// INITIATE NFC COMMUNICATION
nfc.begin();
// INITIATE RANDOM NUMBER GENERATOR
randomSeed(analogRead(0));
// RESET
reset();
}
void reset() {
// LEDS
set_leds(2, 25);
// MOTOR LEVER
motors_attach_detach(0, 0);
lever_motor.write(lever_min);
delay(1000);
motors_attach_detach(1, 0);
// MOTOR BODY
motors_attach_detach(0, 1);
body_motor.write(body_min);
delay(1000);
motors_attach_detach(1, 1);
// ALERT
play_tone(3, 3);
#ifdef DEBUG_TEST
test();
#endif
}
void test() {
play_tone(0, 3);
delay(1000);
play_tone(1, 3);
delay(1000);
play_tone(2, 3);
delay(1000);
play_tone(3, 3);
delay(1000);
set_leds(0, 100);
delay(1000);
set_leds(1, 100);
delay(1000);
set_leds(2, 100);
delay(1000);
set_leds(3, 100);
delay(1000);
set_leds(4, 100);
delay(1000);
set_leds(5, 100);
delay(1000);
set_leds(6, 100);
delay(1000);
set_leds(2, 100);
delay(1000);
move_body(1);
delay(1000);
move_lever();
delay(1000);
move_body(0);
}
void motors_attach_detach(int mode, int num) {
// MODE:
// 0 = ATTACH
// 1 = DETACH
//
// NUM:
// 0 = LEVER
// 1 = BODY
if (mode == 0) {
if (num == 0) {
lever_motor.attach(lever_pin);
} else {
body_motor.attach(body_pin);
}
} else {
if (num == 0) {
lever_motor.detach();
} else {
body_motor.detach();
}
}
}
//----------------------------------------------------------------------------//
// FUNCTIONS (SOUND) //
//----------------------------------------------------------------------------//
void play_tone(int note, int duration) {
// NOTE:
// 0 = BASS
// 1 = MID-BASS
// 2 = MID-TREBLE
// 3 = TREBLE
//
// DURATION:
// 0 = SHORT
// 1 = MID-SHORT
// 2 = MID-LONG
// 3 = LONG
if (note < 0 || note > 3 || duration < 0 || duration > 3) {
return;
}
switch (note) {
case 0:
note = NOTE_FS3;
break;
case 1:
note = NOTE_C5;
break;
case 2:
note = NOTE_FS6;
break;
case 3:
note = NOTE_C8;
break;
}
switch (duration) {
case 0:
duration = 100;
break;
case 1:
duration = 200;
break;
case 2:
duration = 400;
break;
case 3:
duration = 800;
break;
}
tone(speaker_pin, note, duration);
delay(duration);
noTone(speaker_pin);
return;
}
//----------------------------------------------------------------------------//
// FUNCTIONS (LIGHT) //
//----------------------------------------------------------------------------//
int percent_to_bright(int percent) {
// PERCENT:
// 0..100
// RETURN BRIGHT
// 255..0
return 256 - pow(2, percent / percent_to_bright_factor);
}
void set_leds(int color, int bright) {
// COLOR:
// 0 = GREEN
// 1 = YELLOW
// 2 = RED
// 3 = CYAN
// 4 = BLUE
// 5 = MAGENTA
// 6 = WHITE
//
// BRIGHT:
// 0 = OFF
// ..
// 100 = MAX
if (color < 0 || color > 6 || bright < 0 || bright > 100) {
return;
}
int led_r_bright = 255;
int led_g_bright = 255;
int led_b_bright = 255;
int bright_aux = percent_to_bright(bright);
switch (color) {
case 0:
// GREEN
led_g_bright = bright_aux;
break;
case 1:
// YELLOW
led_r_bright = bright_aux;
led_g_bright = bright_aux;
break;
case 2:
// RED
led_r_bright = bright_aux;
break;
case 3:
// CYAN
led_g_bright = bright_aux;
led_b_bright = bright_aux;
break;
case 4:
// BLUE
led_b_bright = bright_aux;
break;
case 5:
// MAGENTA
led_r_bright = bright_aux;
led_b_bright = bright_aux;
break;
case 6:
// WHITE
led_r_bright = bright_aux;
led_g_bright = bright_aux;
led_b_bright = bright_aux;
break;
}
analogWrite(led_r_pin, led_r_bright);
analogWrite(led_g_pin, led_g_bright);
analogWrite(led_b_pin, led_b_bright);
return;
}
//----------------------------------------------------------------------------//
// FUNCTIONS (CHECK) //
//----------------------------------------------------------------------------//
void check_timeout() {
#ifdef DEBUG_TIMEOUT
Serial.print("timeout_lock = ");
Serial.println(timeout_lock);
Serial.print("timeout_front = ");
Serial.println(timeout_front);
#endif
if (! lock && millis() > timeout_lock) {
play_tone(0, 2);
set_leds(2, 25);
if (! front) {
set_leds(0, 50);
move_body(0);
}
lock = !lock;
}
if (! front && millis() > timeout_front) {
play_tone(0, 2);
move_body(0);
}
return;
}
void check_nfc() {
if (nfc.tagPresent()) {
NfcTag tag = nfc.read();
#ifdef DEBUG_NFC
tag.print();
#endif
String nfc_id = tag.getUidString();
if (nfc_id.compareTo(nfc_id_auth) == 0) {
play_tone(3, 1);
set_timeout();
if (lock) {
set_leds(0, 50);
} else {
set_leds(2, 25);
if (! front) {
move_body(0);
}
}
lock = !lock;
} else {
set_leds(2, 100);
play_tone(0, 2);
if (lock) {
set_leds(2, 25);
} else {
set_leds(0, 50);
}
}
}
}
void check_prox() {
int num_check = 5;
float prox_sensor = 0;
for (int i = 0; i < num_check; i++)
{
prox_sensor = prox_sensor + analogRead(prox_pin);
}
prox_sensor = prox_sensor / num_check;
#ifdef DEBUG_PROX
Serial.print("prox_sensor = ");
Serial.println(prox_sensor);
#endif
if (prox_sensor > 500) {
set_timeout();
if (front) {
if (lock) {
set_leds(2, 100);
play_tone(0, 2);
set_leds(2, 25);
} else {
set_leds(0, 100);
play_tone(3, 1);
move_body(1);
}
} else {
if (lever_ok) {
move_lever();
set_leds(0, 100);
lever_ok=false;
} else {
set_leds(1, 100);
play_tone(3, 3);
lever_ok=true;
}
}
} else {
if (! front) {
set_leds(0, 100);
lever_ok=false;
}
}
}
//----------------------------------------------------------------------------//
// FUNCTIONS (MOVE) //
//----------------------------------------------------------------------------//
void move(int step, int time_step, int time_end, int pos1, int new_pos1, int pos2, int new_pos2) {
boolean continue1 = true;
boolean continue2 = true;
boolean moved = false;
if (new_pos1 != 999) {
motors_attach_detach(0, 0);
lever_motor.write(pos1);
} else {
continue1 = false;
}
if (new_pos2 != 999) {
motors_attach_detach(0, 1);
body_motor.write(pos2);
} else {
continue2 = false;
}
do {
if (continue1) {
if (pos1 == new_pos1) {
continue1 = false;
} else {
if (pos1 < new_pos1) {
pos1 += step;
} else {
pos1 -= step;
}
lever_motor.write(pos1);
moved = true;
}
}
if (continue2) {
if (pos2 == new_pos2) {
continue2 = false;
} else {
if (pos2 < new_pos2) {
pos2 += step;
} else {
pos2 -= step;
}
body_motor.write(pos2);
moved = true;
}
}
if (moved) {
delay(time_step);
moved = false;
}
} while (continue1 || continue2);
delay(time_end);
motors_attach_detach(1, 0);
motors_attach_detach(1, 1);
}
void move_body(int pos) {
// POS:
// 0 = FRONT
// 1 = BACK
if (pos == 0) {
front=true;
move(5, 25, 200, 999, 999, body_max, body_min);
} else {
front=false;
motors_attach_detach(0, 1);
body_motor.write(body_max);
delay(1500);
motors_attach_detach(1, 1);
}
}
void move_lever() {
motors_attach_detach(0, 0);
lever_motor.write(lever_max);
delay(300);
lever_motor.write(lever_min);
delay(1500);
motors_attach_detach(1, 0);
delay(1000);
}
//----------------------------------------------------------------------------//
// MIS //
//----------------------------------------------------------------------------//
void set_timeout() {
timeout_lock = millis() + 6 * timeout;
timeout_front = millis() + timeout;
}
//----------------------------------------------------------------------------//
// MAIN //
//----------------------------------------------------------------------------//
void loop() {
check_timeout();
check_prox();
if (time_nfc == 500) {
check_nfc();
time_nfc=0;
} else {
time_nfc++;
}
}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)



{kind=link}
Comments
Please log in or sign up to comment.