


JLCPCB has been at the forefront of the PCB industry. With over 14-year continuous innovation and improvement based on customers' need, we have been growing fast and becoming a leading global PCB manufacturer, who provides the rapid production of high-reliability and cost-effective PCBs and creates the best customer experience in the industry.
Our mission Make hardware development easier
Whether you’re creating your first PCB, or developing an electronic hardware product, we’re here to help you build hardware easier and faster by providing rapid PCB prototype and SMT assembly service. We're constantly looking for new ways to improve and shorten the PCB prototyping process — from pioneering online quoting/ordering system, automatic production to fast delivery.
WHY JLCPCB
Higher Quality Ensuring quality and its consistent improvement are the two main guidelines of our company. Our advanced PCB technology allows us to provide high precision boards suitable for industrial, military, aerospace, and medical applications. We are continuously investing top-level base materials and advanced equipments for fully automated production lines, which enables us to offer our customers high throughput with consistently high quality.
Lower Cost Since 2006, JLCPCB drove to become more efficient and reduce costs. We promise to offer customers the most economic PCBs forever. JLCPCB makes the cheapest but top-quality PCBs possibly because of scale effect, extremely high production efficiency, and less manpower cost.
Faster Delivery Our easy-to-use online ordering system, professional and efficient customer service, digital manufacturing technology, full-automatic production lines, and stable logistics partners make every step to deliver your PCBs faster.
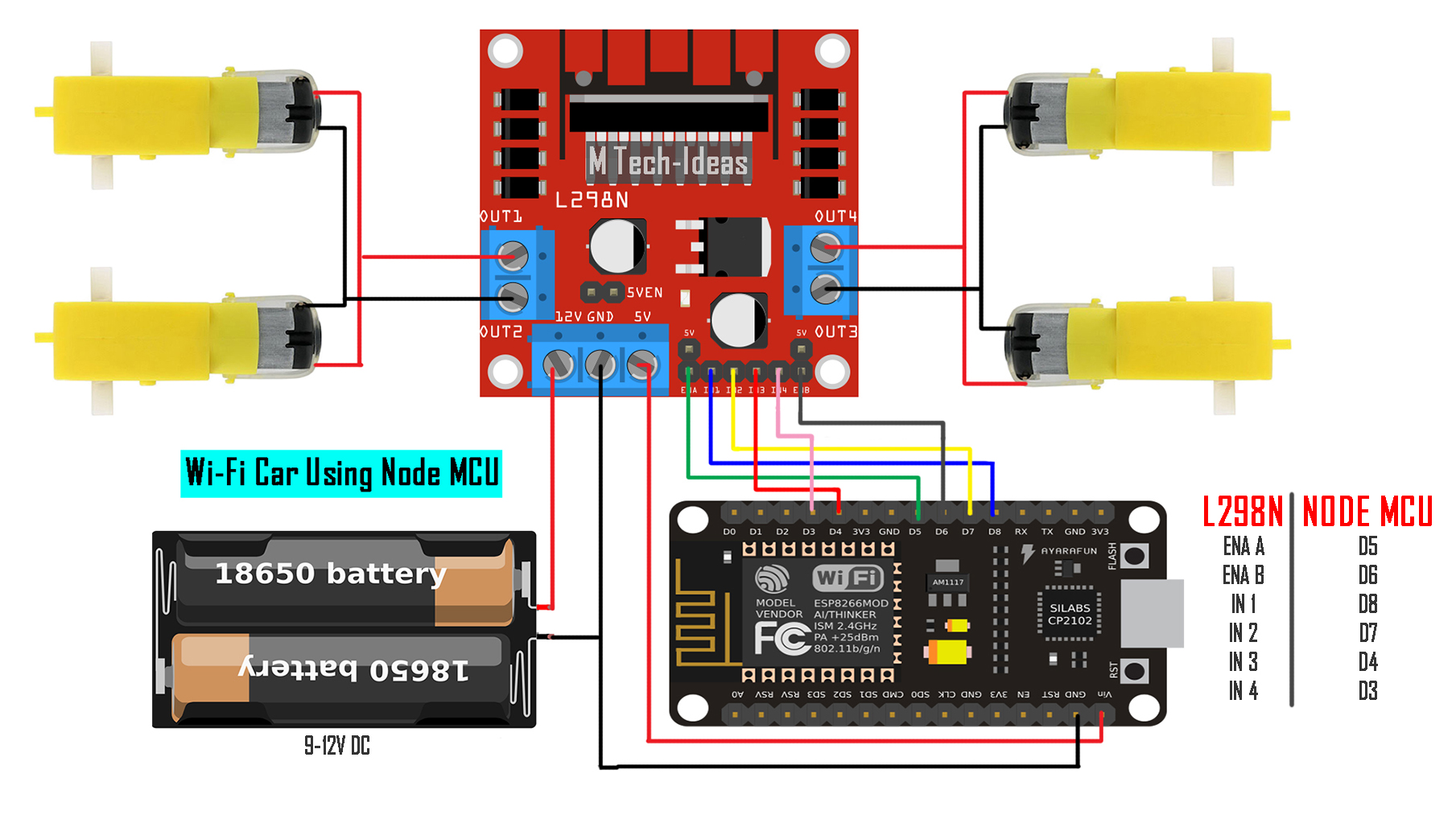
Please follow the steps below, If you are new and not well familiar with this ESP8266 module, or facing a problem while uploading the code
1.First Download the code from the link below. Now open Arduino and Go to File~New.
2.Now a new window will appear. Next, Delete all the existing code and Paste the given code.
3.In the code, you will find Additional Board Manager URL now copy the URL and do the next step. For Different OS you have a different option. MAC: Go to Arduino ~ Preferences Windows: Fille ~ Preferences
4.Now Paste it in the Additional Board Manager URL section and press Ok. Now go to Tools ~ Board ~ Boards Manager Search for ‘ESP8266‘ and install the latest version.
5.After the installation Then go to Tools ~ Board and then select the ESP-12E Module. So, The Board is selected Now.
6.Next, Select the Right COM Port.
7.Then compile the Programme First and then Upload it to NodeMCU. After a few seconds, the code will be compiled and then Uploaded to NodeMCU Car.
The link you have to paste on Arduino IDE
Additional Board Manager URL: http://arduino.esp8266.com/stable/package_esp8266...





{kind=link}
Comments
Please log in or sign up to comment.