The goal of the project was to make an RC car that can controlled with hand gestures using a face tracking camera.
The hand gestures are recognized by a set of code. The brain of the robot is an Arduino Uno. The gestures are recognized by an accelerometer.
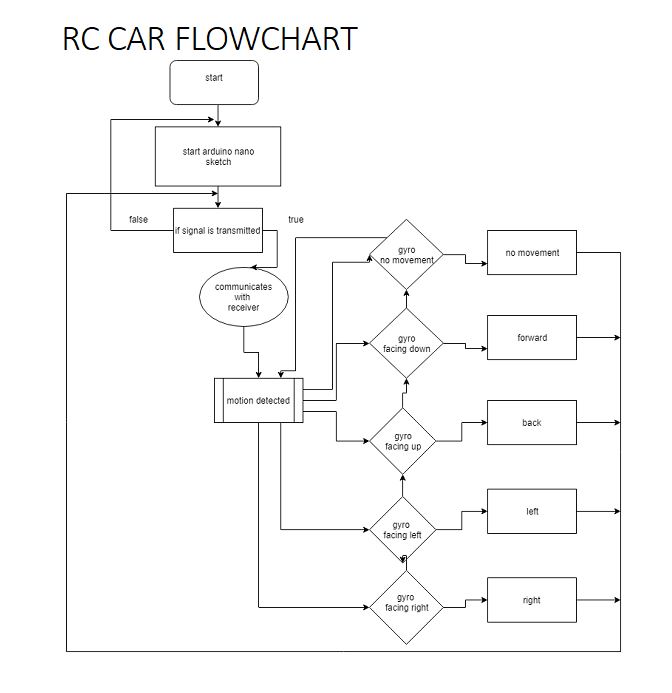
This robot was designed to recognize five hand gestures. Forward, backward, left, right and stop. The accelerometer is a three-axis acceleration-measuring device. It has three axis (X, Y, and Z).
The equipment I used was an Arduino UNO, DC motors, two Arduino Nanos, an ultrasonic sensor, a servo motor, an LCD with I2C, and a glove.
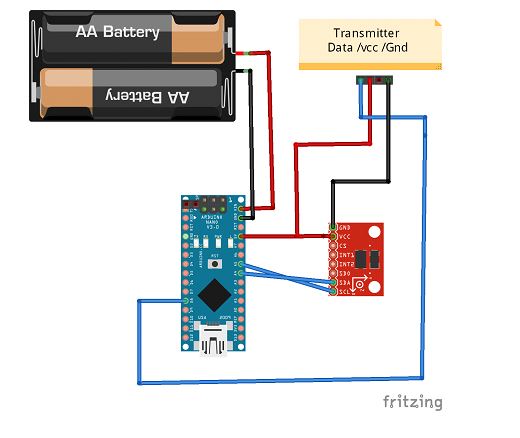
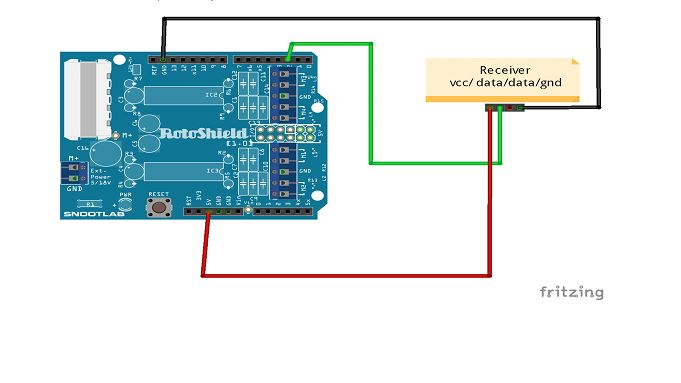
The robot is divided into two parts, transmitter and receiver. The receiver circuit is the same as the one in the RC car project, and there is a small change in the transmitter circuit. In the transmitter circuit is where I program the transmitter circuit to send hand gestures as commands. I will be using Arduino as the programming platform to use hand gestures with an accelerometer sensor. I also used a servo motor and attached two ultrasonic sensors to each sensor to detect obstacles.



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)








{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.