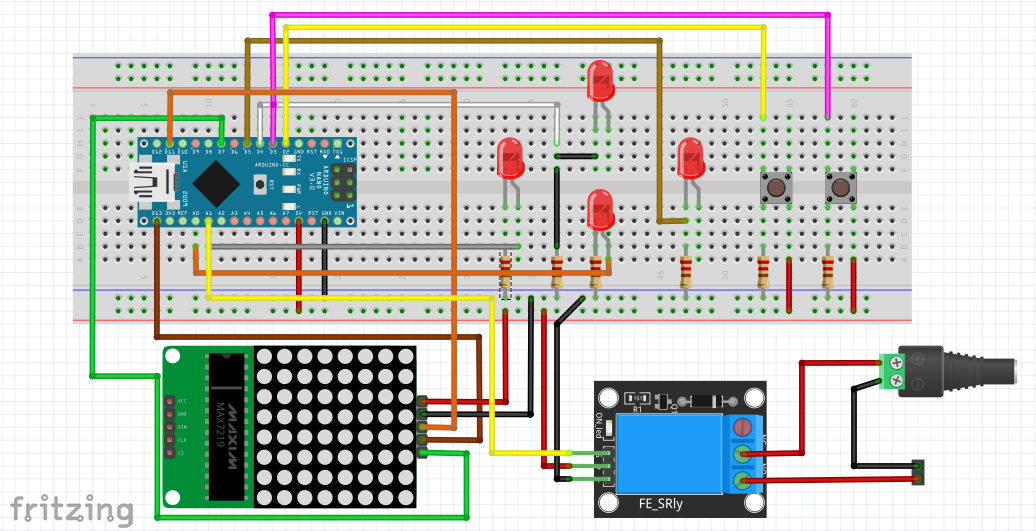
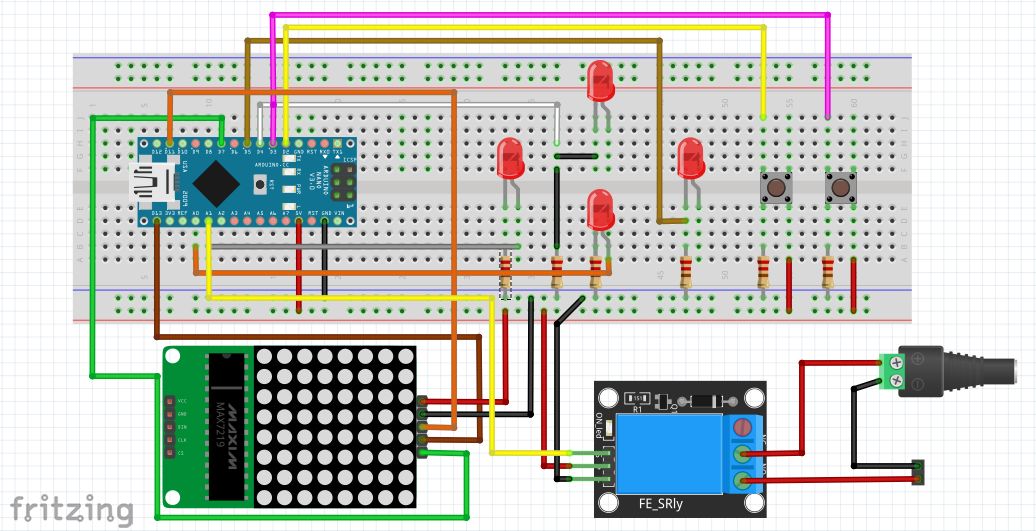
//Mario's Ideas
//Maze Lock
#include <LedControl.h>
int cursor_row= 2;
int cursor_col = 0;
int Direction =1;
int UP_LED = 6;
int DOWN_LED = 8;
int RIGHT_LED = 4;
int LEFT_LED = 12;
int DIN = 11;
int CS = 7;
int CLK = 13;
long Timestamp_Button_Pressed;
LedControl lc=LedControl(DIN, CLK, CS,0);
int CurrentState [8] [8] {
{0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0},
{1,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0}
};
int Move_up [8] [8] {
{0,0,0,0,0,0,0,0},
{1,1,1,0,1,0,1,1},
{1,1,1,1,0,0,0,1},
{0,1,1,1,0,0,0,0},
{1,0,1,1,0,1,1,1},
{1,1,0,0,0,1,1,1},
{1,0,0,0,0,1,0,1},
{0,0,1,0,0,0,0,1}
};
int Move_down [8] [8] {
{1,1,1,0,1,0,1,1},
{1,1,1,1,0,0,0,1},
{0,1,1,1,0,0,0,0},
{1,0,1,1,0,1,1,1},
{1,1,0,0,0,1,1,1},
{1,0,0,0,0,1,1,1},
{0,0,1,0,0,0,0,1},
{0,0,0,0,0,0,0,0}
};
int Move_left [8] [8] {
{0,1,0,0,1,1,0,1},
{0,0,0,0,1,1,1,0},
{0,0,1,0,0,1,1,1},
{0,1,0,0,1,1,0,1},
{0,0,1,0,1,0,0,0},
{0,0,1,1,1,0,0,0},
{0,1,1,1,1,1,1,1},
{0,1,1,1,1,1,1,0}
};
int Move_right [8] [8] {
{1,0,0,1,1,0,1,0},
{0,0,0,1,1,1,0,1},
{0,1,0,0,1,1,1,0},
{1,0,0,1,1,0,1,0},
{0,1,0,1,0,0,0,0},
{0,1,1,1,0,0,0,0},
{1,1,1,1,1,1,1,0},
{1,1,1,1,1,1,0,0}
};
void setup() {
attachInterrupt(0,Change_direction, RISING);
attachInterrupt(1,Move_in_the_maze, RISING);
pinMode(UP_LED, OUTPUT);
pinMode(DOWN_LED, OUTPUT);
pinMode(RIGHT_LED, OUTPUT);
pinMode(LEFT_LED, OUTPUT);
pinMode(A0, OUTPUT);
pinMode(A1, OUTPUT);
lc.shutdown(0,false);
lc.setIntensity(0,3);
lc.clearDisplay(0);
digitalWrite(UP_LED, HIGH);
digitalWrite(DOWN_LED, LOW);
digitalWrite(RIGHT_LED, LOW);
digitalWrite(LEFT_LED, LOW);
digitalWrite(A0, LOW);
digitalWrite(A1, LOW);
Serial.begin(9600);
Timestamp_Button_Pressed=millis();
}
void Change_direction() {
if (millis() - Timestamp_Button_Pressed>200){
Direction= Direction+1;
if (Direction==5) Direction=1;
if (Direction==1) {
digitalWrite(UP_LED, HIGH);
digitalWrite(DOWN_LED, LOW);
digitalWrite(RIGHT_LED, LOW);
digitalWrite(LEFT_LED, LOW);
}
if (Direction==2) {
digitalWrite(UP_LED, LOW);
digitalWrite(DOWN_LED, LOW);
digitalWrite(RIGHT_LED, HIGH);
digitalWrite(LEFT_LED, LOW);
}
if (Direction==3) {
digitalWrite(UP_LED, LOW);
digitalWrite(DOWN_LED, HIGH);
digitalWrite(RIGHT_LED, LOW);
digitalWrite(LEFT_LED, LOW);
}
if (Direction==4) {
digitalWrite(UP_LED, LOW);
digitalWrite(DOWN_LED, LOW);
digitalWrite(RIGHT_LED, LOW);
digitalWrite(LEFT_LED, HIGH);
}
}
}
void Move_in_the_maze(){
if (millis() - Timestamp_Button_Pressed>200){
// Attempt to move up
if (Direction==1 ){
if(Move_up[cursor_row][cursor_col]==1){ // Can we move up?
if(CurrentState[cursor_row-1][cursor_col]==1){
CurrentState[cursor_row][cursor_col]=0;
}
cursor_row=cursor_row-1;
}
}
// Attempt to move right
if (Direction==2 ){
if(Move_right[cursor_row][cursor_col]==1){ // Can we move right?
if(CurrentState[cursor_row][cursor_col+1]==1 and cursor_col!=7)
CurrentState[cursor_row][cursor_col]=0;
cursor_col=cursor_col+1;
}
}
// Attempt to move down
if (Direction==3 ){
if(Move_down[cursor_row][cursor_col]==1){ // Can we move down?
if(CurrentState[cursor_row+1][cursor_col]==1)
CurrentState[cursor_row][cursor_col]=0;
cursor_row=cursor_row+1;
}
}
// Attempt to move left
if (Direction==4 ){
if(Move_left[cursor_row][cursor_col]==1){ // Can we move left?
if(CurrentState[cursor_row][cursor_col-1]==1)
CurrentState[cursor_row][cursor_col]=0;
cursor_col=cursor_col-1;
}
}
CurrentState[cursor_row][cursor_col]=1;
Serial.println(cursor_col);
}
}
void loop() {
for(int i=0;i<8;i++){
lc.setRow(0,i,CurrentState[i][7]+
CurrentState[i][6]*2+
CurrentState[i][5]*4+
CurrentState[i][4]*8+
CurrentState[i][3]*16+
CurrentState[i][2]*32+
CurrentState[i][1]*64+
CurrentState[i][0]*128);
}
if (cursor_col==8){
digitalWrite(A0,HIGH);
digitalWrite(A1,HIGH);
}
}








{kind=link}
Comments
Please log in or sign up to comment.